一种飞行器控制方法、装置、设备及存储介质与流程
本技术涉及互联网,尤其涉及一种飞行器控制方法、装置、设备及存储介质。
背景技术:
1、开源鸿蒙系统是由开放原子开源基金会孵化及运营的开源项目,目标是面向全场景、全连接、全智能时代,基于开源的方式,搭建一个智能终端设备操作系统的框架和平台,促进万物互联产业的繁荣发展。随着开源鸿蒙系统的不断发展与广泛应用,鸿蒙设备越来越多。
2、然而,现有的鸿蒙设备无法向浮空飞行器发送飞行路线和防碰撞指令,不利于提高鸿蒙设备控制浮空飞行器的效率。其原因在于,现有的鸿蒙设备与浮空飞行器之间无法快速建立连接,鸿蒙设备无法向浮空飞行器发送飞行路线和防碰撞指令,因此,不利于提高鸿蒙设备控制浮空飞行器的效率。
技术实现思路
1、本技术实施例提供一种飞行器控制方法、装置、设备及存储介质,以解决上述现有的鸿蒙设备无法向浮空飞行器发送飞行路线和防碰撞指令,不利于提高鸿蒙设备控制浮空飞行器的控制效率。
2、第一方面,本技术实施例提供了一种飞行器控制方法,飞行器控制方法包括:
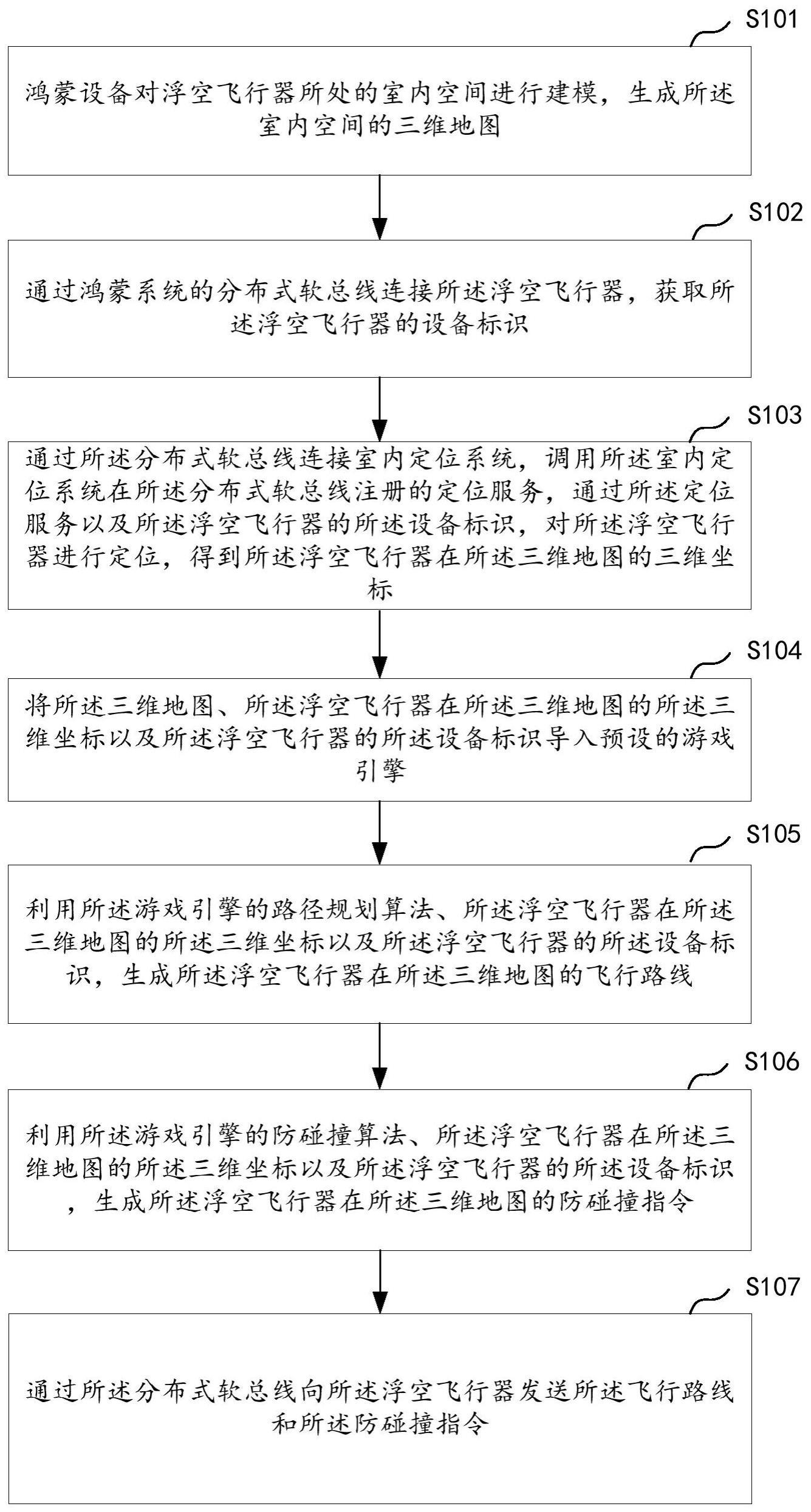
3、鸿蒙设备对浮空飞行器所处的室内空间进行建模,生成室内空间的三维地图;
4、通过鸿蒙系统的分布式软总线连接浮空飞行器,获取浮空飞行器的设备标识;
5、通过分布式软总线连接室内定位系统,调用室内定位系统在分布式软总线注册的定位服务,通过定位服务以及浮空飞行器的设备标识,对浮空飞行器进行定位,得到浮空飞行器在三维地图的三维坐标;
6、将三维地图、浮空飞行器在三维地图的三维坐标以及浮空飞行器的设备标识导入预设的游戏引擎;
7、利用游戏引擎的路径规划算法、浮空飞行器在三维地图的三维坐标以及浮空飞行器的设备标识,生成浮空飞行器在三维地图的飞行路线;
8、利用游戏引擎的防碰撞算法、浮空飞行器在三维地图的三维坐标以及浮空飞行器的设备标识,生成浮空飞行器在三维地图的防碰撞指令;
9、通过分布式软总线向浮空飞行器发送飞行路线和防碰撞指令。
10、作为一个可选的实施方式,
11、通过鸿蒙系统的分布式软总线连接浮空飞行器,获取浮空飞行器的设备标识,包括:
12、执行分布式软总线的设备发现代码,发现附近的可用设备;
13、获取可用设备的用途标识,判断用途标识是否为室内飞行标识;
14、当用途标识为室内飞行标识时,识别可用设备为室内空间的浮空飞行器,获取浮空飞行器的设备标识。
15、作为一个可选的实施方式,通过分布式软总线连接室内定位系统,调用室内定位系统在分布式软总线注册的定位服务,通过定位服务以及浮空飞行器的设备标识,对浮空飞行器进行定位,得到浮空飞行器在三维地图的三维坐标,包括:
16、通过分布式软总线连接室内定位系统,调用室内定位系统在分布式软总线注册的定位服务;
17、通过定位服务与室内定位系统建立第一会话,在第一会话中,向室内定位系统发送预设的浮空飞行器坐标获取指令,浮空飞行器坐标获取指令包括浮空飞行器的设备标识,第一会话为用于室内定位的会话;在第一会话中,接收室内定位系统根据浮空飞行器坐标获取指令返回的浮空飞行器坐标数据,浮空飞行器坐标数据包括浮空飞行器在三维地图的三维坐标。
18、作为一个可选的实施方式,利用游戏引擎的路径规划算法、浮空飞行器在三维地图的三维坐标以及浮空飞行器的设备标识,生成浮空飞行器在三维地图的飞行路线,包括:
19、在游戏引擎中,根据浮空飞行器的设备标识,创建浮空飞行器在三维地图中的飞行参数表;
20、在飞行参数表中,配置浮空飞行器的飞行起点、飞行途经点以及飞行终点;
21、利用游戏引擎的路径规划算法、浮空飞行器在三维地图的三维坐标以及浮空飞行器的飞行起点、飞行途经点以及飞行终点,生成浮空飞行器在三维地图的飞行路线。
22、作为一个可选的实施方式,通过分布式软总线向浮空飞行器发送飞行路线和防碰撞指令,包括:
23、通过分布式软总线连接浮空飞行器的飞行控制模块,调用飞行控制模块在分布式软总线注册的飞行控制服务;
24、通过飞行控制服务与飞行控制模块建立第二会话,在第二会话中向浮空飞行器发送飞行路线和防碰撞指令,第二会话为用于飞行控制的会话。
25、作为一个可选的实施方式,在通过分布式软总线向浮空飞行器发送飞行路线和防碰撞指令之后,方法包括:
26、通过分布式软总线在室内定位系统中,获取浮空飞行器当前所处的位置;
27、判断浮空飞行器当前所处的位置是否为目标位置;
28、如果浮空飞行器当前所处的位置为目标位置,向浮空飞行器发送预设指令,预设指令包括执行互动任务的指令、展示预设广告的指令以及展示预设飞行动作的指令的其中一种或其组合。
29、作为一个可选的实施方式,室内定位系统包括uwb定位系统、wifi定位系统、蓝牙定位系统、rfid定位系统中的其中一种或其组合。
30、第二方面,本技术实施例还提供了一种飞行器控制装置,飞行器控制装置包括处理器和存储器,存储器中存储有计算机程序,处理器调用存储器中的计算机程序时执行上述的飞行器控制方法。
31、第三方面,本技术实施例还提供了一种设备,设备包括如上述的飞行器控制装置。
32、第四方面,本技术实施例还提供了一种存储介质,存储介质用于存储计算机程序,计算机程序被处理器执行时使处理器实现上述的飞行器控制方法。
33、本技术实施例提供了一种飞行器控制方法、装置、设备及存储介质,方法包括:
34、鸿蒙设备对浮空飞行器所处的室内空间进行建模,生成室内空间的三维地图;
35、通过鸿蒙系统的分布式软总线连接浮空飞行器,获取浮空飞行器的设备标识;
36、通过分布式软总线连接室内定位系统,调用室内定位系统在分布式软总线注册的定位服务,通过定位服务以及浮空飞行器的设备标识,对浮空飞行器进行定位,得到浮空飞行器在三维地图的三维坐标;
37、将三维地图、浮空飞行器在三维地图的三维坐标以及浮空飞行器的设备标识导入预设的游戏引擎;
38、利用游戏引擎的路径规划算法、浮空飞行器在三维地图的三维坐标以及浮空飞行器的设备标识,生成浮空飞行器在三维地图的飞行路线;
39、利用游戏引擎的防碰撞算法、浮空飞行器在三维地图的三维坐标以及浮空飞行器的设备标识,生成浮空飞行器在三维地图的防碰撞指令;
40、通过分布式软总线向浮空飞行器发送飞行路线和防碰撞指令。
41、本技术实施例的有益效果在于两方面,一方面,鸿蒙设备通过分布式软总线向浮空飞行器发送飞行路线和防碰撞指令,解决了现有的鸿蒙设备无法向浮空飞行器发送飞行路线和防碰撞指令的问题,有利于提高鸿蒙设备控制浮空飞行器的效率;另一方面,鸿蒙设备向浮空飞行器发送飞行路线和防碰撞指令,有利于指示浮空飞行器沿着飞行路线飞行,同时有利于指示浮空飞行器根据防碰撞指令规避飞行过程中的障碍物。
- 还没有人留言评论。精彩留言会获得点赞!