伺服驱动器运行控制系统的优化方法及系统与流程
本技术实施例涉及人工智能,具体而言,涉及一种伺服驱动器运行控制系统的优化方法及系统。
背景技术:
1、随着机器人和数控技术的不断发展,伺服驱动器被广泛应用于工业机器人及数控加工中心等自动化设备中。伺服驱动器又称为伺服控制器或伺服放大器,是用来控制伺服电机的一种控制器,其作用类似于变频器,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,在相关技术中,通常通过统一的伺服驱动器运行控制系统对伺服驱动器进行运行控制。因此,伺服驱动器运行控制系统的稳定性关系到伺服驱动器的稳定性,对于所属领域的技术人员而言,必须要及时排查出伺服驱动器运行控制系统可能存在的故障点。例如,可以通过人工智能技术配置的神经网络模型进行故障特征预测,然而现有的方案在进行故障特征预测过程中通常仅单纯考虑提取的运行控制故障点本身,难以保证故障特征预测的精准度,从而影响在故障点排查之后伺服驱动器运行控制系统的优化可靠性。
技术实现思路
1、为了至少克服现有技术中的上述不足,本技术实施例的目的在于提供一种伺服驱动器运行控制系统的优化方法及系统。
2、依据本技术实施例的一个方面,提供了一种伺服驱动器运行控制系统的优化方法,包括:
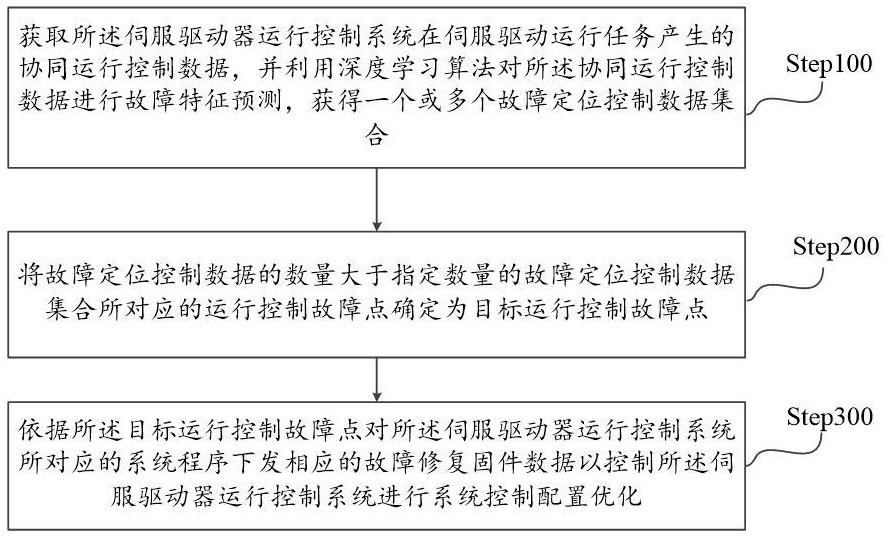
3、获取所述伺服驱动器运行控制系统在伺服驱动运行任务产生的协同运行控制数据,并利用深度学习算法对所述协同运行控制数据进行故障特征预测,获得一个或多个故障定位控制数据集合,其中,不同所述故障定位控制数据集合中包括不同故障标签所对应的故障定位控制数据;
4、将故障定位控制数据的数量大于指定数量的故障定位控制数据集合所对应的运行控制故障点确定为目标运行控制故障点;
5、依据所述目标运行控制故障点对所述伺服驱动器运行控制系统所对应的系统程序下发相应的故障修复固件数据以控制所述伺服驱动器运行控制系统进行系统控制配置优化。
6、对于一些可替代的实施例而言,所述获取所述伺服驱动器运行控制系统在伺服驱动运行任务产生的协同运行控制数据,并利用深度学习算法对所述协同运行控制数据进行故障特征预测,获得一个或多个故障定位控制数据集合,具体包括:
7、将所述协同运行控制数据导入故障特征预测网络中,利用所述故障特征预测网络将所述协同运行控制数据进行切分,获得各个运行控制事件;
8、利用所述故障特征预测网络对所述各个运行控制事件分别进行被控状态矢量编码,获得所述各个运行控制事件对应的伺服被控状态矢量,所述伺服被控状态矢量包括传递伺服被控状态矢量和目标伺服被控状态矢量;
9、对所述各个运行控制事件分别进行反馈状态矢量编码,获得所述各个运行控制事件对应的随动反馈状态矢量,所述随动反馈状态矢量包括传递随动反馈状态矢量和目标随动反馈状态矢量;
10、利用所述故障特征预测网络对所述各个运行控制事件对应的传递伺服被控状态矢量和传递随动反馈状态矢量进行矢量协作表达,获得所述各个运行控制事件对应的协作表达矢量分布;
11、利用所述故障特征预测网络对所述各个运行控制事件对应的目标伺服被控状态矢量、目标随动反馈状态矢量和协作表达矢量分布进行事件表达矢量分析,获得所述各个运行控制事件对应的事件表达矢量,并利用所述事件表达矢量进行故障标签值估计,获得所述各个运行控制事件对应的故障标签值;
12、利用所述故障标签值从所述协同运行控制数据中确定各个故障定位控制数据,并利用所述事件表达矢量确定所述各个故障定位控制数据对应的故障点触发矢量;
13、利用所述各个故障定位控制数据对应的故障点触发矢量进行数据分配,获得一个或多个故障定位控制数据集合。
14、对于一些可替代的实施例而言,所述利用所述各个故障定位控制数据对应的故障点触发矢量进行数据分配,获得一个或多个故障定位控制数据集合,包括:
15、利用所述各个故障定位控制数据对应的故障点触发矢量进行编码,获得主成分特征;
16、利用所述主成分特征和所述各个运行控制事件对应的故障标签值进行解码,获得所述各个故障定位控制数据对应的目标故障点触发矢量;
17、利用所述各个故障定位控制数据对应的目标故障点触发矢量对所述各个故障定位控制数据进行数据分配,获得所述故障定位控制数据集合;
18、所述利用所述各个故障定位控制数据对应的故障点触发矢量进行编码,获得主成分特征,包括:
19、提取所述各个运行控制事件分别对应的基础控制操作矢量,从所述各个运行控制事件分别对应的基础控制操作矢量中确定所述各个故障定位控制数据对应的基础故障控制操作矢量;
20、将所述各个故障定位控制数据对应的基础故障控制操作矢量分别与对应的故障点触发矢量进行融合,获得所述各个故障定位控制数据对应的融合矢量数据;
21、将所述各个故障定位控制数据对应的融合矢量数据导入主成分特征解析模型中进行主成分特征提取,获得目标主成分特征;
22、所述利用所述各个故障定位控制数据对应的目标故障点触发矢量对所述各个故障定位控制数据进行数据分配,获得所述故障定位控制数据集合,包括:
23、利用所述各个故障定位控制数据对应的目标故障点触发矢量计算所述各个故障定位控制数据之间的故障点相关度;
24、利用所述各个故障定位控制数据之间的故障点相关度进行聚类,获得所述故障定位控制数据集合。
25、对于一些可替代的实施例而言,所述对所述各个运行控制事件分别进行被控状态矢量编码,获得所述各个运行控制事件对应的伺服被控状态矢量,所述伺服被控状态矢量包括传递伺服被控状态矢量和目标伺服被控状态矢量,包括:
26、对所述各个运行控制事件分别进行滑动平均处理,获得所述各个运行控制事件对应的多个传递滑动特征和目标选择特征数据;
27、将多个所述传递滑动特征进行伺服被控状态解析,获得所述各个运行控制事件对应的多个传递伺服被控状态矢量;
28、将所述目标选择特征数据进行伺服被控状态解析,获得所述各个运行控制事件对应的目标伺服被控状态矢量。
29、对于一些可替代的实施例而言,所述对所述各个运行控制事件分别进行反馈状态矢量编码,获得所述各个运行控制事件对应的随动反馈状态矢量,所述随动反馈状态矢量包括传递随动反馈状态矢量和目标随动反馈状态矢量,包括:
30、提取所述各个运行控制事件分别对应的基础控制操作矢量;
31、对所述各个运行控制事件分别对应的基础控制操作矢量进行随动反馈状态特征提取,获得所述各个运行控制事件对应的多个传递随动反馈状态矢量和目标随动反馈状态矢量。
32、对于一些可替代的实施例而言,所述传递伺服被控状态矢量包括多个,所述传递随动反馈状态矢量包括多个;
33、所述利用所述故障特征预测网络对所述各个运行控制事件对应的传递伺服被控状态矢量和传递随动反馈状态矢量进行矢量协作表达,获得所述各个运行控制事件对应的协作表达矢量分布,包括:
34、将多个所述传递伺服被控状态矢量中第一传递伺服被控状态矢量与多个所述传递随动反馈状态矢量中对应的第一传递随动反馈状态矢量进行交互,获得第一交互状态矢量,利用所述第一交互状态矢量进行多元回归分析,获得第一协作表达矢量;
35、将所述第一协作表达矢量、多个所述传递伺服被控状态矢量中第二传递伺服被控状态矢量与多个所述传递随动反馈状态矢量中对应的第二传递随动反馈状态矢量进行交互,获得第二交互状态矢量,利用所述第二交互状态矢量进行多元回归分析,获得第二协作表达矢量;
36、遍历多个所述传递伺服被控状态矢量和多个所述传递随动反馈状态矢量完成时,获得协作表达矢量分布。
37、对于一些可替代的实施例而言,所述利用所述故障特征预测网络对所述各个运行控制事件对应的目标伺服被控状态矢量、目标随动反馈状态矢量和协作表达矢量分布进行事件表达矢量分析,获得所述各个运行控制事件对应的事件表达矢量,并利用所述事件表达矢量进行故障标签值估计,获得所述各个运行控制事件对应的故障标签值,包括:
38、将所述各个运行控制事件对应的目标伺服被控状态矢量、目标随动反馈状态矢量和协作表达矢量分布进行融合,获得所述各个运行控制事件对应的融合矢量数据;
39、利用所述各个运行控制事件对应的融合矢量数据进行基于期望交叉熵的特征项选择,获得所述各个运行控制事件对应的目标选择特征数据;
40、利用所述各个运行控制事件对应的目标选择特征数据计算所述目标选择特征数据中每个伺服驱动控制标签对应的最大控制标签值和平均控制标签值;
41、计算所述最大控制标签值与所述平均控制标签值的和,获得所述目标选择特征数据中每个伺服驱动控制标签对应的目标控制标签值,利用所述目标选择特征数据中每个伺服驱动控制标签对应的目标控制标签值,获得所述各个运行控制事件对应的显著性特征矢量;
42、将所述各个运行控制事件对应的显著性特征矢量进行线性激活,获得所述各个运行控制事件对应的事件表达矢量;
43、利用所述各个运行控制事件对应的事件表达矢量进行故障触发事件和非故障触发事件的故障估计,获得所述各个运行控制事件对应的故障标签值。
44、对于一些可替代的实施例而言,所述故障特征预测网络包括伺服被控编码子网络、随动反馈子网络、矢量协作表达子网络、全局表达子网络和故障估计子网络;所述方法还包括:
45、将所述协同运行控制数据导入故障特征预测网络中,利用所述故障特征预测网络将所述协同运行控制数据进行切分,获得各个运行控制事件; 将所述各个运行控制事件导入所述伺服被控编码子网络中进行反馈状态矢量编码,获得传递伺服被控状态矢量和目标伺服被控状态矢量;
46、将所述各个运行控制事件导入所述随动反馈子网络中进行反馈状态矢量编码,获得传递随动反馈状态矢量和目标随动反馈状态矢量;
47、将各个运行控制事件对应的传递伺服被控状态矢量和传递随动反馈状态矢量导入所述矢量协作表达子网络中进行矢量协作表达,获得所述各个运行控制事件对应的协作表达矢量分布;
48、将所述各个运行控制事件对应的目标伺服被控状态矢量、目标随动反馈状态矢量和协作表达矢量分布导入所述全局表达子网络进行事件表达矢量分析,获得所述各个运行控制事件对应的事件表达矢量,并将所述事件表达矢量导入所述故障估计子网络进行故障标签值估计,获得所述各个运行控制事件对应的故障标签值。
49、对于一些可替代的实施例而言,所述故障特征预测网络的训练步骤,包括:
50、获取模板协同运行控制数据和对应的先验故障特征数据;
51、将所述模板协同运行控制数据导入基础故障特征预测网络中,利用所述基础故障特征预测网络将所述模板协同运行控制数据进行切分,获得各个模板运行控制事件;
52、利用所述基础故障特征预测网络对所述各个模板运行控制事件分别进行被控状态矢量编码,获得所述各个模板运行控制事件对应的模板伺服被控状态矢量,所述模板伺服被控状态矢量包括模板传递伺服被控状态矢量和模板目标伺服被控状态矢量;
53、对所述各个模板运行控制事件分别进行反馈状态矢量编码,获得所述各个模板运行控制事件对应的模板随动反馈状态矢量,所述模板随动反馈状态矢量包括模板传递随动反馈状态矢量和模板目标随动反馈状态矢量;
54、利用所述基础故障特征预测网络对所述各个模板运行控制事件对应的模板传递伺服被控状态矢量和模板传递随动反馈状态矢量进行矢量协作表达,获得所述各个模板运行控制事件对应的模板协作表达矢量;
55、利用所述基础故障特征预测网络对所述各个模板运行控制事件对应的模板目标伺服被控状态矢量、模板目标随动反馈状态矢量和模板协作表达矢量进行事件表达矢量分析,获得所述各个模板运行控制事件对应的模板事件表达矢量,并利用所述模板事件表达矢量进行故障标签值估计,获得所述各个模板运行控制事件对应的模板故障标签值;
56、利用所述各个模板运行控制事件对应的模板故障标签值和所述模板协同运行控制数据对应的先验故障特征数据进行故障估计代价值计算,获得故障估计代价值,利用所述故障估计代价值,利用反向传播算法训练所述基础故障特征预测网络,获得候选故障特征预测网络;
57、将所述候选故障特征预测网络作为基础故障特征预测网络,并返回获取模板协同运行控制数据和对应的先验故障特征数据的步骤执行,直至满足训练终止条件时,获得所述故障特征预测网络。
58、依据本技术实施例的一个方面,提供了一种伺服驱动器运行控制系统的优化系统,所述伺服驱动器运行控制系统的优化系统包括处理器和机器可读存储介质,所述机器可读存储介质中存储有机器可执行指令,所述机器可执行指令由所述处理器加载并执行以实现前述任意一种可能的实施方式中的伺服驱动器运行控制系统的优化方法。
59、依据本技术实施例的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述三方面的各种可选实现方式中提供的方法。
60、在本技术的一些实施例所提供的技术方案中,通过获取伺服驱动器运行控制系统在伺服驱动运行任务产生的协同运行控制数据,并利用深度学习算法对协同运行控制数据进行故障特征预测,获得一个或多个故障定位控制数据集合,将故障定位控制数据的数量大于指定数量的故障定位控制数据集合所对应的运行控制故障点确定为目标运行控制故障点,依据目标运行控制故障点向伺服驱动器运行控制系统所对应的系统程序下发相应的故障修复固件数据以控制所述伺服驱动器运行控制系统进行系统控制配置优化,由此考虑到不同运行控制故障点的故障定位控制数据的数量对伺服驱动器运行控制系统进行故障特征预测,对于仅考虑运行控制故障点的方案来说,本技术可以提高故障特征预测的精准度,进而提高伺服驱动器运行控制系统的优化可靠性。
61、通过将协同运行控制数据进行切分,获得各个运行控制事件。对各个运行控制事件分别进行被控状态矢量编码,获得传递伺服被控状态矢量和目标伺服被控状态矢量,并对各个运行控制事件分别进行反馈状态矢量编码,获得传递随动反馈状态矢量和目标随动反馈状态矢量。然后使用各个运行控制事件对应的传递伺服被控状态矢量和传递随动反馈状态矢量进行矢量协作表达,获得各个运行控制事件对应的协作表达矢量分布,通过矢量协作表达可以结合伺服被控状态和随动反馈状态之间的互补信息,使得协作表达矢量分布可以具有更多的深度矢量。然后使用各个运行控制事件对应的目标伺服被控状态矢量、目标随动反馈状态矢量和协作表达矢量分布进行事件表达矢量分析,获得各个运行控制事件对应的事件表达矢量,这样设计,事件表达矢量可以有效结合伺服被控状态信息和随动反馈状态信息,同时可以尽可能保留实际控制状态。然后利用事件表达矢量进行故障标签值估计,获得各个运行控制事件对应的故障标签值,进而提高故障估计的准确性。然后利用故障标签值从协同运行控制数据中确定各个故障定位控制数据,并利用事件表达矢量确定各个故障定位控制数据对应的故障点触发矢量;利用各个故障定位控制数据对应的故障点触发矢量进行数据分配,获得一个或多个故障定位控制数据集合,提高数据分配的精准度,从而提高了故障定位控制数据集合的精准度。
- 还没有人留言评论。精彩留言会获得点赞!