自移动机器人控制方法、系统及自移动机器人与流程
本申请涉及智能装备,具体涉及一种自移动机器人控制方法、系统及自移动机器人。
背景技术:
1、随着自动化技术的发展,自移动机器人在服务、物流、探测等领域具有越来越广的应用前景。
2、自移动机器人是一种能够在没有任何人类干预的情况下独立移动的机器人,它通常配备有传感器和控制器,使其能够感知环境、规划移动路线并避免障碍。目前的自移动机器人大多是通过执行原地旋转动作或者后退动作来判断自身是否具备重新规划运动路线的条件。
3、但是,在自移动机器人与障碍物紧贴无法执行原地旋转动作或者后退动作的工况下,自移动机器人会由于无法规划出新的运动路线而处于卡困状态,此时只能人为介入辅助脱困,智能化程度较低。
技术实现思路
1、鉴于以上问题,本申请提供一种自移动机器人控制方法、系统及自移动机器人,以解决上述技术问题。
2、第一方面,本申请提供一种自移动机器人控制方法,该自移动机器人控制方法包括:
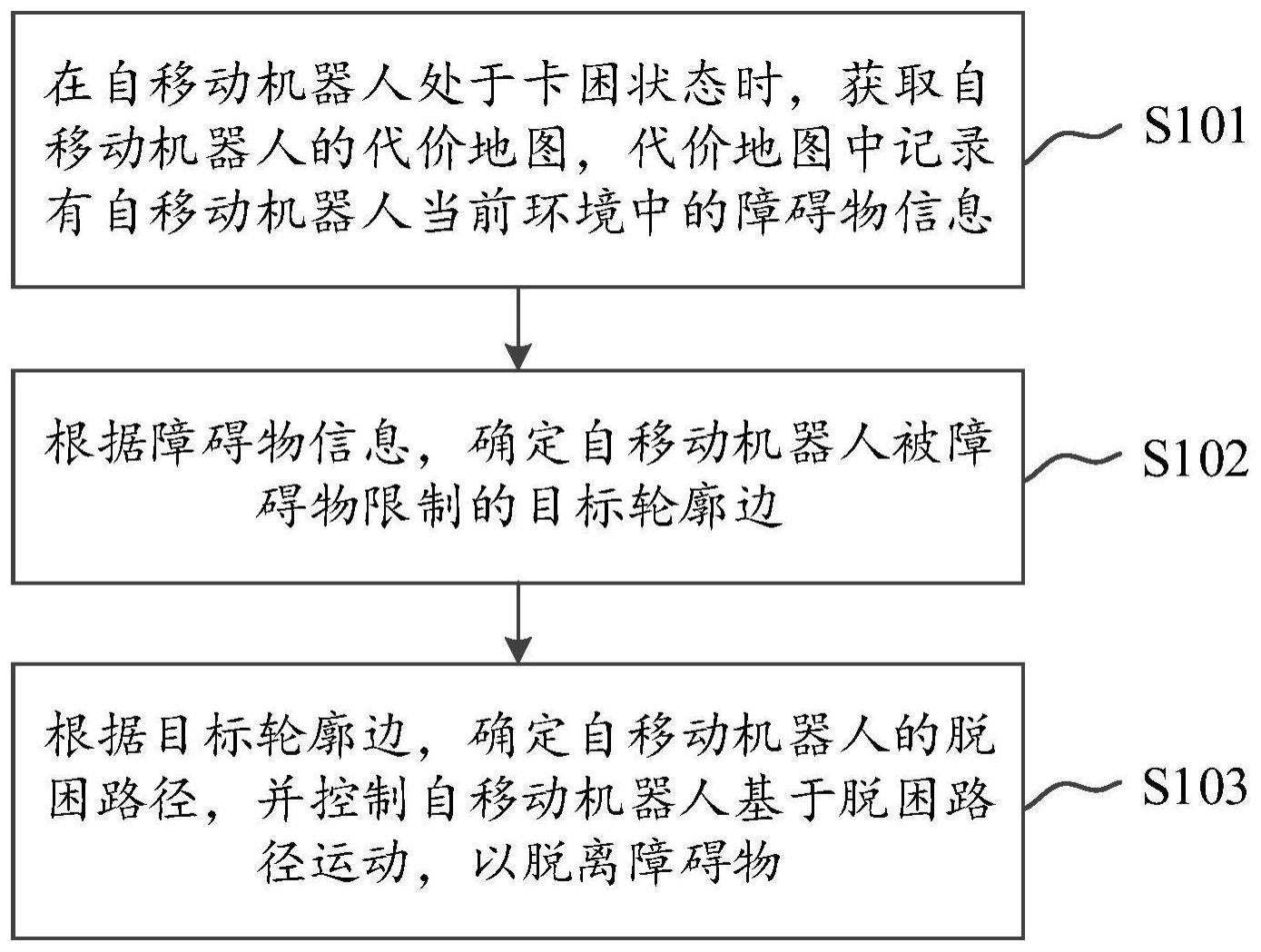
3、在自移动机器人处于卡困状态时,获取自移动机器人的代价地图,代价地图中记录有自移动机器人当前环境中的障碍物信息;
4、根据障碍物信息,确定自移动机器人被障碍物限制的目标轮廓边;
5、根据目标轮廓边,确定自移动机器人的脱困路径,并控制自移动机器人基于脱困路径运动,以脱离障碍物。
6、在本申请一种可能的实现方式中,自移动机器人配置有用于检测环境中障碍物信息的感知传感器,获取自移动机器人的代价地图,之前,方法包括:
7、获取感知传感器在自移动机器人所处的当前环境中检测到的障碍物信息;
8、根据障碍物信息,构建代价地图。
9、在本申请一种可能的实现方式中,根据障碍物信息,确定自移动机器人被障碍物限制的目标轮廓边,包括:
10、根据障碍物信息,得到自移动机器人的每一轮廓边的代价值,代价值用于表征轮廓边被障碍物限制的大小程度;
11、根据每一轮廓边的代价值,确定目标轮廓边。
12、在本申请一种可能的实现方式中,根据每一轮廓边的代价值,确定目标轮廓边,包括:
13、针对于每一轮廓边,若该轮廓边的代价值大于或者等于预设代价阈值,则确定该轮廓边为目标轮廓边。
14、在本申请一种可能的实现方式中,根据目标轮廓边,确定自移动机器人的脱困路径,并控制自移动机器人基于脱困路径运动,包括:
15、以自移动机器人的前进方向作为前方,若目标轮廓边为自移动机器人的前轮廓边或后轮廓边,则确定脱困路径为相对轮廓边所在方向的直线路径,控制自移动机器人沿相对轮廓边所在方向作直线运动,相对轮廓边为与目标轮廓边相对的轮廓边;
16、若目标轮廓边为自移动机器人的任一侧轮廓边,则确定脱困路径为相对轮廓边所在方向的弧线路径,控制自移动机器人沿相对轮廓边所在方向作弧线运动;
17、若目标轮廓边为自移动机器人的任意两相邻轮廓边,则确定脱困路径为与该两相邻轮廓边分别相对的两轮廓边所在方向的合成方向的弧线路径,控制自移动机器人沿两轮廓边合成方向作弧线运动。
18、在本申请一种可能的实现方式中,若目标轮廓边为自移动机器人的前轮廓边或后轮廓边,则确定脱困路径为相对轮廓边所在方向的直线路径,控制自移动机器人沿相对轮廓边所在方向作直线运动,包括:
19、若目标轮廓边为前轮廓边,则确定脱困路径为后轮廓边所在方向的直线路径,控制自移动机器人沿后方作直线后退运动;
20、若目标轮廓边为后轮廓边,则确定脱困路径为前轮廓边所在方向的直线路径,控制自移动机器人沿前方作直线前进运动。
21、在本申请一种可能的实现方式中,若目标轮廓边为自移动机器人的任一侧轮廓边,则确定脱困路径为相对轮廓边所在方向的弧线路径,控制自移动机器人沿相对轮廓边所在方向作弧线运动,包括:
22、若目标轮廓边为左轮廓边,则确定脱困路径为右轮廓边所在方向的弧线路径,控制自移动机器人沿右方作右前方弧线前进运动或右后方弧线后退运动;
23、若目标轮廓边为右轮廓边,则确定脱困路径为左轮廓边所在方向的弧线路径,控制自移动机器人沿左方作左前方弧线前进运动或左后方弧线后退运动。
24、在本申请一种可能的实现方式中,若目标轮廓边为自移动机器人的任意两相邻轮廓边,则确定脱困路径为与该两相邻轮廓边分别相对的两轮廓边所在方向的合成方向的弧线路径,控制自移动机器人沿两轮廓边合成方向作弧线运动,包括:
25、若目标轮廓边为前轮廓边和左轮廓边,则确定脱困路径为后轮廓边和右轮廓边所在方向的合成方向的弧线路径,控制自移动机器人沿右后方作弧线后退运动;
26、若目标轮廓边为前轮廓边和右轮廓边,则确定脱困路径为后轮廓边和左轮廓边所在方向的合成方向的弧线路径,控制自移动机器人沿左后方作弧线后退运动;
27、若目标轮廓边为后轮廓边和左轮廓边,则确定脱困路径为前轮廓边和右轮廓边所在方向的合成方向的弧线路径,控制自移动机器人沿右前方作弧线前进运动;
28、若目标轮廓边为后轮廓边和右轮廓边,则确定脱困路径为前轮廓边和左轮廓边所在方向的合成方向的弧线路径,控制自移动机器人沿左前方作弧线前进运动。
29、在本申请一种可能的实现方式中,控制自移动机器人基于脱困路径运动,包括:
30、在自移动机器人基于脱困路径运动时,根据脱困路径和代价地图预测自移动机器人是否会与障碍物发生碰撞;
31、若预测自移动机器人不会与障碍物发生碰撞,则控制自移动机器人基于脱困路径运动。
32、第二方面,本申请还提供一种自移动机器人控制系统,该自移动机器人控制系统包括控制端以及与控制端通信连接的自移动机器人;
33、控制端,用于控制自移动机器人运动,并实现第一方面或者第一方面任一种可能的实现方式中的自移动机器人控制方法。
34、第三方面,本申请还提供一种自移动机器人,该自移动机器人包括存储器和处理器,存储器用于存储计算机程序,计算机程序被处理器执行时,用于实现第一方面或者第一方面任一种可能的实现方式中的自移动机器人控制方法。
35、第四方面,本申请还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,该计算机指令被处理器执行时实现第一方面或者第一方面任一种可能的实现方式中的自移动机器人控制方法中的步骤。
36、从以上内容可得出,本申请具有以下的有益效果:
37、本申请中,在自移动机器人处于卡困状态时,根据代价地图中记录的障碍物信息,确定该自移动机器人被障碍物限制的目标轮廓边,再根据目标轮廓边确定脱困路径,控制自移动机器人基于该脱困路径运动,以远离障碍物,避免了自移动机器人与障碍物紧贴无法执行原地旋转动作或者后退动作的工况下,由于无法规划出新的运动路线而处于卡困状态,需要人为介入辅助脱困的问题,加强了自移动机器人的脱困路径规划能力,智能化程度高,用户体验更好。
技术特征:
1.一种自移动机器人控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述自移动机器人配置有用于检测环境中障碍物信息的感知传感器,所述获取所述自移动机器人的代价地图,之前,所述方法包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述障碍物信息,确定所述自移动机器人被障碍物限制的目标轮廓边,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述每一轮廓边的代价值,确定所述目标轮廓边,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述目标轮廓边,确定所述自移动机器人的脱困路径,并控制所述自移动机器人基于所述脱困路径运动,包括:
6.根据权利要求5所述的方法,其特征在于,所述若所述目标轮廓边为所述自移动机器人的前轮廓边或后轮廓边,则确定所述脱困路径为相对轮廓边所在方向的直线路径,控制所述自移动机器人沿所述相对轮廓边所在方向作直线运动,包括:
7.根据权利要求5所述的方法,其特征在于,所述若所述目标轮廓边为所述自移动机器人的任一侧轮廓边,则确定所述脱困路径为所述相对轮廓边所在方向的弧线路径,控制所述自移动机器人沿所述相对轮廓边所在方向作弧线运动,包括:
8.根据权利要求5所述的方法,其特征在于,所述若所述目标轮廓边为所述自移动机器人的任意两相邻轮廓边,则确定所述脱困路径为与该两相邻轮廓边分别相对的两轮廓边所在方向的合成方向的弧线路径,控制所述自移动机器人沿所述两轮廓边合成方向作弧线运动,包括:
9.根据权利要求1-8任一项所述的方法,其特征在于,所述控制所述自移动机器人基于所述脱困路径运动,包括:
10.一种自移动机器人控制系统,其特征在于,包括控制端以及与所述控制端通信连接的自移动机器人;
11.一种自移动机器人,其特征在于,包括存储器和处理器,所述存储器用于存储计算机程序,所述计算机程序被所述处理器执行时,用于实现权利要求1-9任一项所述的自移动机器人控制方法。
技术总结
本申请公开了一种自移动机器人控制方法、系统及自移动机器人,该方法包括:在自移动机器人处于卡困状态时,获取自移动机器人的代价地图,代价地图中记录有自移动机器人当前环境中的障碍物信息;根据障碍物信息,确定自移动机器人被障碍物限制的目标轮廓边;根据目标轮廓边,确定自移动机器人的脱困路径,并控制自移动机器人基于脱困路径运动,以脱离障碍物。本申请根据被障碍物限制的目标轮廓边确定脱困路径,控制自移动机器人基于该脱困路径运动,以远离障碍物,避免了自移动机器人与障碍物紧贴无法规划出新的运动路线而处于卡困状态,需要人为介入辅助脱困的问题,加强了自移动机器人的脱困路径规划能力,智能化程度高,用户体验更好。
技术研发人员:谢凯旋,陈泽宇
受保护的技术使用者:科沃斯家用机器人有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!