地砖铺贴的控制方法、装置、介质与流程
本技术涉及计算机,具体而言,涉及一种地砖铺贴的控制方法、装置、介质。
背景技术:
1、随着科技的发展,铺砖机器人应用于室内环境或者室外环境,并经地砖铺贴于地面,铺砖机器人设有工作臂,该工作臂吸附地砖,并带动地砖进行姿态调整,此时,地砖在工作臂的带动下进行多个方向的转动,在现有技术中,处于地砖的检测器接收外部的激光,并且基于检测器所输出的信号进行分解、解析以及调整等操作,最终形成偏转数据,导致铺砖机器人的工作臂的姿态的调整较为复杂。
技术实现思路
1、本技术的实施例提供了一种地砖铺贴的控制方法、装置、介质,进而至少在一定程度上通过第一图形与预设图形的对比确定偏转数据,以便于获取多个方向的偏转数据,进而根据偏转数据对铺砖机器人的工作臂的姿态进行多方向调整,简化了铺砖机器人的工作臂的姿态的调整,保证了铺砖机器人进行地砖铺贴的准确性;另外,在第二图形与预设图形相重合时,维持铺砖机器人的工作臂的当前姿态,进一步保证了铺砖机器人进行地砖铺贴的准确性。
2、本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
3、根据本技术实施例的一个方面,提供了一种地砖铺贴的控制方法,应用于铺砖机器人;
4、所述地砖铺贴的控制方法包括:
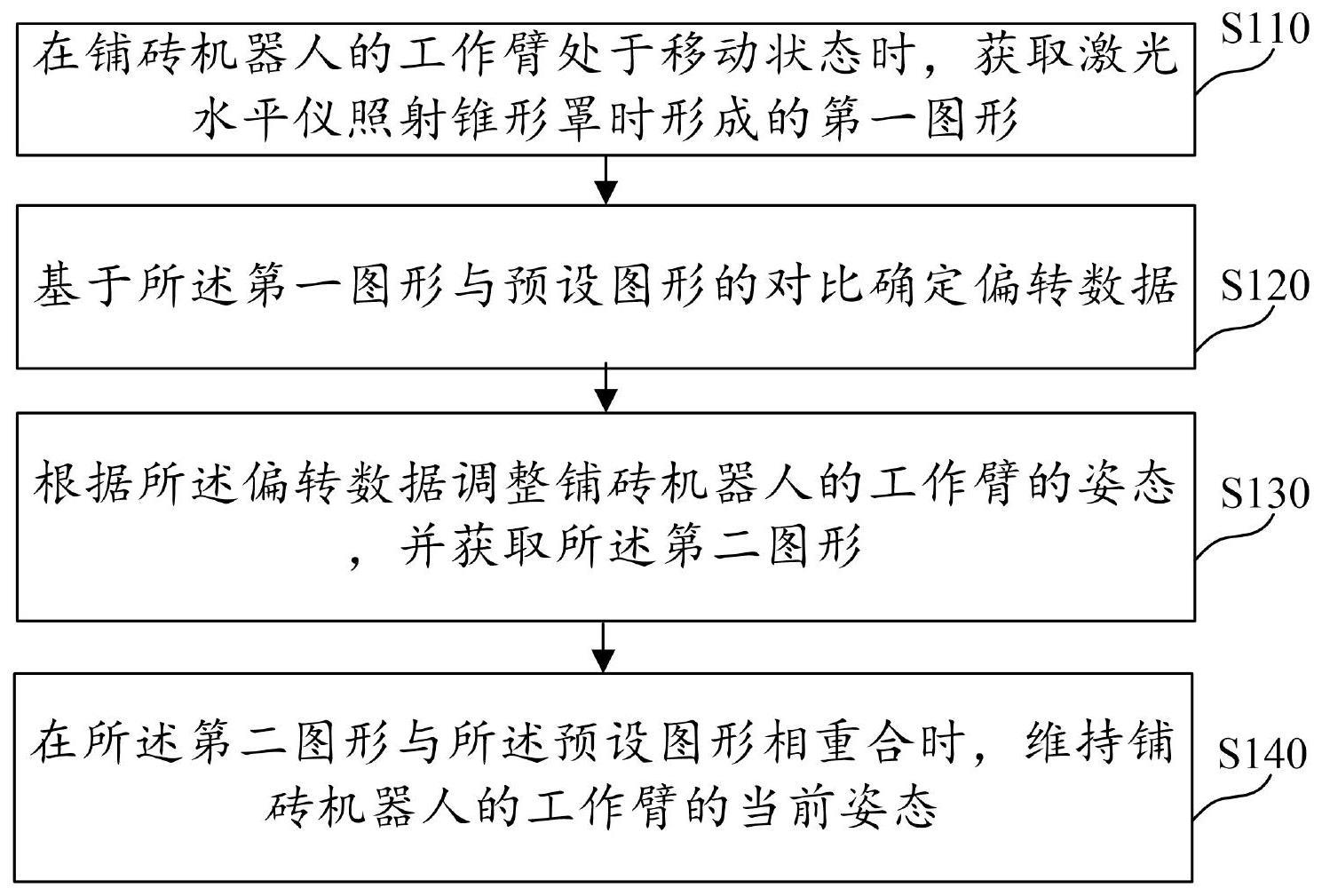
5、在铺砖机器人的工作臂处于移动状态时,获取激光水平仪照射锥形罩时形成的第一图形;
6、基于所述第一图形与预设图形的对比确定偏转数据;
7、根据所述偏转数据调整铺砖机器人的工作臂的姿态,并获取所述第二图形;
8、在所述第二图形与所述预设图形相重合时,维持铺砖机器人的工作臂的当前姿态。
9、可选的,铺砖机器人的工作臂吸附地砖,锥形罩安装于地砖上;
10、所述在铺砖机器人的工作臂处于移动状态时,获取激光水平仪照射锥形罩时形成的第一图形,包括:
11、获取铺砖机器人的工作臂相对于地砖的吸附信号;
12、基于吸附信号触发铺砖机器人的工作臂的移动,此时,铺砖机器人的工作臂沿着竖直方向移动,并且铺砖机器人的工作臂处于移动状态;
13、在铺砖机器人的工作臂处于移动状态时,激光水平仪向锥形罩输出光线,此时,锥形罩罩设相机,并且相机的拍摄端朝向锥形罩的顶部;
14、获取激光水平仪照射锥形罩时形成的第一图形。
15、可选的,所述在铺砖机器人的工作臂处于移动状态时,获取激光水平仪照射锥形罩时形成的第一图形,还包括:
16、获取铺砖机器人的工作臂的移动信号;
17、若铺砖机器人的工作臂的移动信号发生变化时,则触发相机对锥形罩的顶部进行拍摄,并获取第一图形,此时,第一图形的形状随着铺砖机器人的工作臂的偏转而变化;
18、或者,相机在预设时间内对锥形罩的顶部进行拍摄,并获取第一图形。
19、可选的,所述基于所述第一图形与预设图形的对比确定偏转数据,包括:
20、基于锥形罩构建多个方向轴,其中,多个方向轴包括翻滚轴、俯仰轴、高度轴;
21、基于激光水平仪所输出的激光照射至锥形罩,并在锥形罩中形成所述第一图形;
22、监控第一图形的形态变化,并且记录第一图形的形态与预设图形之间的差异情况;
23、基于差异情况确定偏转数据,其中,基于一个传感器同时获取高度、俯仰和翻滚三个方向的偏转数据。
24、可选的,所述基于差异情况确定偏转数据,包括:
25、若激光水平仪所输出的激光沿上下方向移动,则第一图形的半径随之变化,此时,激光水平仪所输出的激光的位置越高,第一图形的半径越小;
26、若锥形罩绕俯仰轴发生偏转且出现俯仰偏转,则第一图形为一个沿翻滚轴拉伸的椭圆,并且俯仰角越大,椭圆长轴越长。
27、若锥形罩绕翻滚轴发生偏转且出现翻滚偏转,则第一图形为一个沿俯仰轴拉伸的椭圆,并且翻滚角越大,椭圆长轴越长。
28、可选的,针对锥形罩,锥形罩设有圆锥曲面,圆锥曲面公式为:
29、其中,(x,y,z)为曲面上任一点的坐标值,而(x,y)可通过相机拍摄获得,(a,b,c)为圆锥顶点的空间坐标值,r为圆锥的底面半径,h为高度;
30、通过上述公式和相机拍摄获取的一组(xi,yi)可求得对应一组zi值,从而获得xoz平面的一组坐标(xi,zi)和yoz平面的一组坐标(yi,zi);
31、其次,将xoz平面的各点(xi,zi)拟合出一条直线,该直线的斜率即为俯仰角的正弦值;同理,yoz平面的各点(yi,zi)拟合出的直线斜率亦为翻滚角的正弦值;
32、然后,调节俯仰轴和翻滚轴,将锥形罩底面调节至水平,这样,从相机视域中观察,激光线在锥形罩上投影应呈正圆弧形;
33、最后,通过激光正圆弧形和标准光圈位置的半径差δr,即可获取待调节高差值
34、可选的,所述根据所述偏转数据调整铺砖机器人的工作臂的姿态,并获取所述第二图形,包括:
35、根据所述偏转数据进行数据解析,并分列出对应的轴的控制数据;
36、基于对应的轴的控制数据控制铺砖机器人的工作臂的对应电机的工作,并调整铺砖机器人的工作臂的姿态;
37、随着铺砖机器人的工作臂的姿态的调整,相机同步进行拍摄,并获取所述第二图形。
38、可选的,所述在所述第二图形与所述预设图形相重合时,维持铺砖机器人的工作臂的当前姿态,包括:
39、将所述第二图形与所述预设图形进行对比;
40、在所述第二图形完全覆盖所述预设图形时,则所述第二图形与所述预设图形相重合,维持铺砖机器人的工作臂的当前姿态。
41、根据本技术实施例的一个方面,提供了一种地砖铺贴的控制装置,包括:
42、第一获取模块,用于在铺砖机器人的工作臂处于移动状态时,获取激光水平仪照射锥形罩时形成的第一图形;
43、方向模块,用于基于所述第一图形与预设图形的对比确定偏转数据;
44、第二获取模块,用于根据所述偏转数据调整铺砖机器人的工作臂的姿态,并获取所述第二图形;
45、维持模块,用于在所述第二图形与所述预设图形相重合时,维持铺砖机器人的工作臂的当前姿态。
46、根据本技术实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述实施例中所述的地砖铺贴的控制方法。
47、根据本技术实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述实施例中所述的地砖铺贴的控制方法。
48、根据本技术实施例的一个方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述实施例中提供的地砖铺贴的控制方法。
49、在本技术的一些实施例所提供的技术方案中,在铺砖机器人的工作臂处于移动状态时,获取激光水平仪照射锥形罩时形成的第一图形;基于第一图形与预设图形的对比确定偏转数据;根据偏转数据调整铺砖机器人的工作臂的姿态,并获取第二图形;在第二图形与预设图形相重合时,维持铺砖机器人的工作臂的当前姿态,此时,通过第一图形与预设图形的对比确定偏转数据,以便于获取多个方向的偏转数据,进而根据偏转数据对铺砖机器人的工作臂的姿态进行多方向调整,简化了铺砖机器人的工作臂的姿态的调整,保证了铺砖机器人进行地砖铺贴的准确性;另外,在第二图形与预设图形相重合时,维持铺砖机器人的工作臂的当前姿态,进一步保证了铺砖机器人进行地砖铺贴的准确性。
50、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!