一种基于改进RRT的多智能体路径规划方法
本发明涉及路径规划,尤其涉及一种基于改进rrt的多智能体路径规划方法。
背景技术:
1、单个智能机器人的工作效率和应用场景都十分受限,多个智能机器人的协同工作可有效提高智能体的工作效率,极大地拓展智能机器人的应用领域与工作场景。多智能体路径规划与协同运动技术是机器人技术领域中的重要研究方向之一。在实际应用中,例如自主驾驶、协作机器人、无人机等领域,多个智能体之间的协同运动和路径规划是必不可少的。因此,开发高效可靠的多智能体路径规划与协同运动技术对于提高智能体的自主性和自适应性至关重要。
2、传统rrt算法路径规划:1)将单个智能体起点作为快速扩展随机树的根节点,进行随机采样获得拓展随机点;2)将符合搜索条件的随机点,加入到快速扩展随机树中作为叶结点进行扩展;3)重复上述过程,直到智能体终点作为叶节点被加入到快速扩展随机树中为止,从保存的节点中提取规划路径。但传统rrt算法仅适用于单智能体路径规划,无法完成多智能体路径规划,其次规划的路径冗余点多、频繁转弯、曲率不连续导致平滑性差,并且路径与障碍物之间的距离不受控制,会出现路径与障碍物之间距离过近的情况。
技术实现思路
1、为了解决上述技术问题,本发明提出一种基于改进rrt的多智能体路径规划方法,能够提升智能体在规划路径上运行的安全性与平稳性,提高多智能体系统的工作效率。
2、为了达到上述目的,本发明的技术方案如下:
3、一种基于改进rrt的多智能体路径规划方法,包括如下步骤:
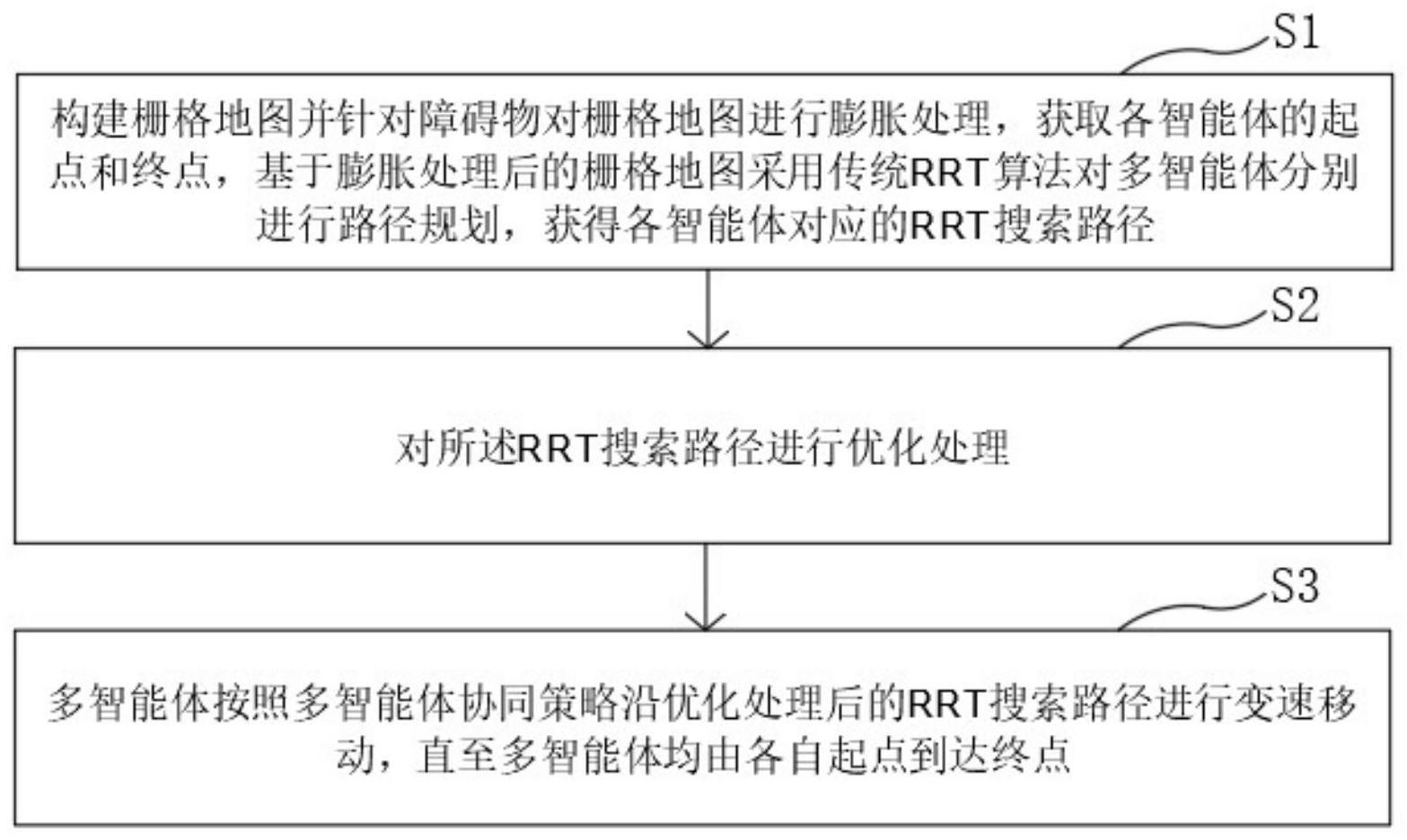
4、步骤1,构建栅格地图并针对障碍物对栅格地图进行膨胀处理,获取各智能体的起点和终点,基于膨胀处理后的栅格地图采用传统rrt算法对多智能体分别进行路径规划,获得各智能体对应的rrt搜索路径;
5、步骤2,对所述rrt搜索路径进行优化处理;
6、步骤3,多智能体按照多智能体协同策略沿优化处理后的rrt搜索路径进行变速移动,直至多智能体均由各自起点到达终点。
7、优选地,所述步骤2,具体包括如下步骤:
8、步骤2.1,采用路径冗余点删除算法删除rrt搜索路径中冗余点,获得修正路径;
9、步骤2.2,采用四次b样条曲线对修正路径进行平滑处理,获得优化处理后的rrt搜索路径。
10、优选地,所述步骤2.1,具体包括如下步骤:
11、步骤2.11,以智能体的起点作为直线段的第一端点并将起点加入修正后的路径节点中;
12、步骤2.12,依次将rrt搜索路径中路径节点作为直线段第二端点,若直线段经过障碍物,则将所述直线段连接的路径节点中前一个路径节点保存至修正后的路径节点;
13、步骤2.13,将当前所述直线段连接的路径节点作为直线段的第一端点,转至步骤2.12,循环操作,直至直线段的第二端点为智能体的终点时,将智能体的终点加入修正后的路径节点中并将修正后的路径节点连接的路径作为优化处理后的rrt搜索路径。
14、优选地,还包括如下步骤:分别针对所述rrt搜索路径和修正路径,确定添加控制点的位置以及添加控制点的数量。
15、优选地,所述步骤3,具体包括如下步骤:
16、步骤3.1,多智能体分别沿对应的rrt搜索路径匀速移动,判断多智能体是否均到达终点,若是,则结束;若否,则转至步骤3.2;
17、步骤3.2,依次判断每一个智能体是否到达终点,若是,则该智能体停止移动并标记;若否,则转至步骤3.3;
18、步骤3.3,该智能体沿两路径节点连线均速移动,并在均速移动过程中判断是否与其他智能体之间的距离小于预设阈值,若是,则转至步骤3.4;若否,则转至步骤3.5;
19、步骤3.4,分别计算当前智能体与其他智能体的剩余rrt搜索路径长度,剩余rrt搜索路径长度最长的智能体均速移动优先通过,其他智能体减速至停止,并转至步骤3.6;
20、步骤3.5,查看当前是否存在未达到终点且停止的智能体,若是,则使停止的智能体恢复均速移动并转至步骤3.6,若否,则转至步骤3.6;
21、步骤3.6,判断智能体是否临近下一个路径节点,若是,则转至步骤3.7;若否,则转至步骤3.3;
22、步骤3.7,判断该路径节点是否为转弯点,若是,则减速或慢速移动直至转向完成并转至步骤3.1,若否,则转至步骤3.8;
23、步骤3.8,判断该路径节点是否为终点,若是,则减速或慢速移动直至到达终点并转至步骤3.2,若否,则转至步骤3.3。
24、优选地,所述均速移动为智能体采用最大速度做均速移动。
25、优选地,所述使停止的智能体恢复均速移动过程中,智能体加速直至达到最大速度并采用最大速度进行匀速移动。
26、基于上述技术方案,本发明的有益效果是:本发明采用形态学中膨胀操作对环境地图中的障碍物区域进行合适扩展,使全局规划的智能体路径远离障碍物,提高了智能体在路径上运动的安全性。根据多智能体系统中的智能体信息,设置多个互不影响的快速扩展随机树起点,采用传统rrt算法分别进行路径搜素,并且采用路径冗余点删除算法、路径控制点添加算法、四次b样条曲线平滑改善各智能体路径质量,缩短路径长度,减少路径转向数,以及提高路径平滑性。在多智能体协同阶段,各智能体沿修正平滑后的全局路径,按照多智能体协同策略进行变速移动,安全平稳的由各自起点到达终点,该阶段与全局多智能体路径规划共同实现将rrt算法应用于多智能体领域。本发明能够有效的改善了传统rrt算法路径规划的质量,减少路径冗余,降低路径转向数,并能够提升智能体在规划路径上运行的安全性与平稳性,提高多智能体系统的工作效率。
技术特征:
1.一种基于改进rrt的多智能体路径规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于改进rrt的多智能体路径规划方法,其特征在于,所述步骤2,具体包括如下步骤:
3.根据权利要求2所述的一种基于改进rrt的多智能体路径规划方法,其特征在于,所述步骤2.1,具体包括如下步骤:
4.根据权利要求2或3所述的一种基于改进rrt的多智能体路径规划方法,其特征在于,还包括如下步骤:
5.根据权利要求1所述的一种基于改进rrt的多智能体路径规划方法,其特征在于,所述步骤3,具体包括如下步骤:
6.根据权利要求5所述的一种基于改进rrt的多智能体路径规划方法,其特征在于,所述均速移动为智能体采用最大速度做均速移动。
7.根据权利要求6所述的一种基于改进rrt的多智能体路径规划方法,其特征在于,所述使停止的智能体恢复均速移动过程中,智能体加速直至达到最大速度并采用最大速度进行匀速移动。
技术总结
本发明公开一种基于改进RRT的多智能体路径规划方法,包括如下步骤构建栅格地图并针对障碍物对栅格地图进行膨胀处理,获取各智能体的起点和终点,基于膨胀处理后的栅格地图采用传统RRT算法对多智能体分别进行路径规划,获得各智能体对应的RRT搜索路径;对所述RRT搜索路径进行优化处理;多智能体按照多智能体协同策略沿优化处理后的RRT搜索路径进行变速移动,直至多智能体均由各自起点到达终点。本发明能够有效的改善了传统RRT算法路径规划的质量,减少路径冗余,降低路径转向数,并能够提升智能体在规划路径上运行的安全性与平稳性,提高多智能体系统的工作效率。
技术研发人员:刘慧舟,李奔,黄忠,黄梦醒
受保护的技术使用者:海南大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!