一种露天矿山卸载区分配卸载点的方法及系统与流程
本发明属于工程运输、智慧矿山领域、自动驾驶,具体涉及一种无人驾驶矿用卡车卸载过程中分配卸载点的方法。
背景技术:
1、近年来,无人驾驶技术在矿山等应用场景被广泛的投入使用。无人驾驶矿用卡车(简称无人矿卡)可以减少剥离、装卸、运输等露天矿山上关键生产环节的人工需求,并实现生产环节之间的高效协同。同时,可以解决矿用卡车司机需要长时间面对噪声、浮尘、振动等的问题;另一方面,减少甚至杜绝相关环节因人为因素导致的安全生产事故,并降低司机用工及车辆维护成本,提升矿山整体的作业效率。
2、在无人矿卡的卸载过程这一场景中,需要对将要进行卸载作业的卸载点进行提前分配,以向无人驾驶的路径规划模块提供规划路线的端点。具体而言,无人矿卡需在进入卸载场地之前获得卸载点位的位姿(即卸载点的地理位置信息与车辆在该点卸载时应保持的姿态),随后获得卸载区的行驶路线,包括车辆的入场路线与出场路线。无人矿卡将从卸载场地的入口沿入场路线行驶至卸载点位,完成举斗-卸料-落斗的卸载流程后,沿出场路线行驶至卸载场地的出口,方完成一次完整的卸载流程。
3、在分配卸载点时,有诸多需要考虑的约束条件:首先,卸载点的可用次数是有限的。卸载点通常为卸载区边界上垂直于边界挡墙的位姿点,矿卡需倒车至贴靠挡墙,将物料卸载至挡墙外部。一个点位经过一定次数的卸载后,就不再具有可卸载的条件,需要推土机进行修整。其次,当卸载区内有推土机作业时,推土机所干扰的卸载点不应被分配给无人矿卡。另外,当多台无人矿卡同时进入卸载区进行卸载作业时,需考虑多台无人矿卡之间的协同,提高卸载效率。
技术实现思路
1、鉴于上述现有存在的问题,提出了本发明。本发明原创的卸载点选择算法,此方法特别针对无人矿山的卸载区,可在无人工干预情况下自动完成无人矿卡卸载点的合理分配;考虑到了露天矿山卸载区的推土机作业流程;考虑到了多车协同卸载的需求。
2、因此,提供了一种露天矿山卸载区分配卸载点的方法。
3、为解决上述技术问题,本发明提供如下技术方案,一种露天矿山卸载区分配卸载点的方法,包括:
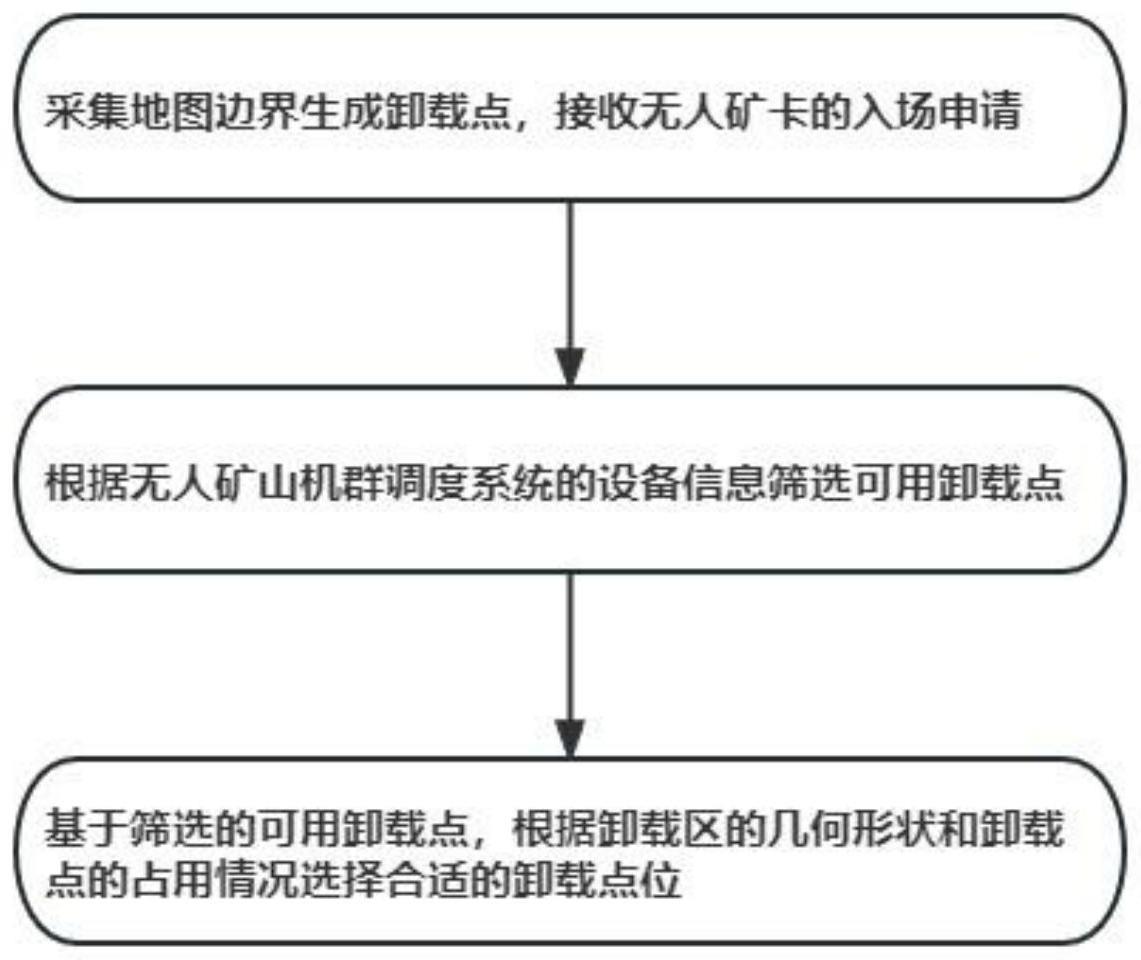
4、采集地图边界生成卸载点,接收无人矿卡的入场申请;根据无人矿山机群调度系统的设备信息筛选可用卸载点;基于筛选的可用卸载点,根据卸载区的几何形状和卸载点的占用情况选择合适的卸载点位。
5、作为本发明所述的露天矿山卸载区分配卸载点的方法的一种优选方案,其中:所述生成卸载点包括根据采集数据计算卸载点间隔距离,计算卸载点方向角,具体步骤如下:
6、在卸载区边界上随机生成一个卸载点,作为初始卸载点,以初始卸载点为起点,沿着卸载点间隔的方向,计算出下一个卸载点的位置,沿着垂直于地图边界的方向,旋转一定角度,得到下一个卸载点的方向角:
7、计算起点与地图边界的夹角:
8、α=tan-1(起点纵坐标/起点横坐标)
9、计算卸载点间隔对应的角度:
10、β=tan-1(卸载点间隔/地图边界的长)
11、计算卸载点的方向角:
12、γ=α+β
13、将计算得到的卸载点坐标与卸载区边界进行比较,当卸载点超出边界,则调整卸载点位置,使其位于卸载区边界上,重复计算方向角至生成足够数量的卸载点。
14、作为本发明所述的露天矿山卸载区分配卸载点的方法的一种优选方案,其中:所述可用卸载点包括筛除无可用次数卸载点、筛除被作业的推土机干扰卸载点、筛除卸载点挡墙塌陷以及露天矿山规定筛除。
15、所述无可用次数卸载点包括设置卸载点上限次数,当每次无人矿卡成功完成卸载后,则减少可用次数,当可用次数减少至0时推土机入场修整,并在筛选可用卸载点时筛除卸载点可用次数为0的卸载点。
16、作为本发明所述的露天矿山卸载区分配卸载点的方法的一种优选方案,其中:所述推土机干扰卸载点包括设置第一安全距离值s1和第二安全距离值s2:
17、当qpost≤s1时,自动卸载点删除。
18、当qpost>s1,但qmin≤s2时,筛除卸载点。
19、当qpost>s1且qmin>s2时,保留卸载点并分配给无人矿卡进行卸载。
20、其中,qpost为载点距离推土机定位距离,qmin为卸载点所在卸载区入场出场路线上离推土机最近的点距离。
21、作为本发明所述的露天矿山卸载区分配卸载点的方法的一种优选方案,其中:所述选择合适的卸载点位包括分配卸载点时,设置前后入场的无人矿卡保持15米的安全距离,根据分配方法分配卸载点。
22、所述几何形状包括多车卸载时,无人矿卡沿区域边界以环状路线行驶,减少入场车辆与出场车辆的会车冲突,后入场的无人矿卡所分配的卸载点在区域边界上距离入场点近。
23、作为本发明所述的露天矿山卸载区分配卸载点的方法的一种优选方案,其中:所述卸载点的占用情况包括根据收集的数据,识别使用频繁的卸载点使用动态策略增加卸载区的移动式卸载点数量分流车辆,在实施动态策略的过程中,实时监测卸载点的使用情况,以及调整后的效果。
24、作为本发明所述的露天矿山卸载区分配卸载点的方法的一种优选方案,其中:所述分配方法包括将可用卸载点根据沿边界视角离卸载区出场点的距离进行排序,存储在列表中,维护所有分配出去的卸载点集合s与最后一次分配出去的卸载点p,当无人矿山机群收到无人矿卡的入场新请求时,从最后一次分配出去的卸载点p开始向列表尾部遍历,对遍历的每个点,与所有分配出去的卸载点集合s中的点的欧氏距离进行比较:
25、当距离小于所述安全距离,则继续向后搜索,否则输出当前卸载点,当输出当前卸载点时,无人矿山机群调度将当前卸载点所对应的入场路线与出场路线发送给申请中的无人矿卡入场。
26、当搜索至列表尾部时,从头部继续开始搜索,遍历完列表仍未输出卸载点时,输出空值表示分配失败,无人矿卡则停车等待在卸载区外并间隔规定时间后再次申请卸载点。
27、本发明的另外一个目的是提供了一种露天矿山卸载区分配卸载点的方法的系统,机群调度模块根据车辆入场顺序和卸载点候选列表,分配卸载点实现高度自动化,提高卸载效率;卸载点分配模块根据筛选结果,将不同车辆分配到不同的卸载点,从而减少车辆之间的冲突;可以轻松地与其他相关系统进行集成,如车辆调度系统、矿卡监控系统;系统通过收集和分析车辆和卸载点的相关数据,可以不断优化卸载策略,提高卸载效率,还可以根据实际运行情况,对卸载点进行动态调整,以应对不同场景和需求。
28、一种露天矿山卸载区分配卸载点的系统,其特征在于,包括地图边界采集模块、机群调度模块、卸载点筛选模块及卸载点分配模块。
29、所述地图边界采集模块,由采图设备完成地图边界的采集。
30、所述机群调度模块,对卸载区的地图进行新建、更新生成卸载点,接收无人矿卡的入场申请。
31、所述卸载点筛选模块,根据无人矿山机群调度系统提供的设备信息,筛选可用卸载点。
32、所述卸载点分配模块,在可用的卸载点中根据实际情况选择合适卸载点位。
33、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现一种露天矿山卸载区分配卸载点所述的方法的步骤。
34、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现一种露天矿山卸载区分配卸载点所述的方法的步骤。
35、本发明的有益效果:提出了分配卸载点的方法包括了一个原创的卸载点选择算法,此方法特别针对无人矿山的卸载区,可在无人工干预情况下自动完成无人矿卡卸载点的合理分配;方法中考虑到了露天矿山卸载区的推土机作业流程,保证了无人矿卡与人工驾驶推土机的协同作业的高效和安全;方法中考虑到了多车协同卸载的需求,保证了多无人矿卡同时卸载时的高效和安全。
- 还没有人留言评论。精彩留言会获得点赞!