基于平坦理论的储能变流器改进自抗扰控制方法
本发明属于变流器,具体涉及基于平坦理论的储能变流器改进自抗扰控制方法。
背景技术:
1、由于全球能源消耗的迅速增长,传统能源面临巨大危机,为了解决这一问题,世界各国都在积极发展清洁能源代替传统能源。但是由于分布式电源由于受到天气等因素的影响具有一定的间歇性,输出的功率不稳定,直接接入电网会影响配电网的稳定运行,严重时还会降低配电网的安全性,建立储能系统是解决这一问题的有效方法。
2、以光伏微电网为例,常见的源光储能源供电系统如图1所示,由三相交流电网、用户侧交流负载、变流器、分布式光伏电源、储能电池构成。该拓扑的工作方式为:当光照充足时,负荷所需功率由光伏电源提供,光伏产生多余能量由储能电池吸收;当光照强度较弱时,在高峰用电期间光伏电源发出功率不足以匹配负荷所需功率,差额部分由储能电池供给,仍不足再由电网补充,在低谷用电期间再由电网整流给储能模块充电恢复电池能量,以达到最大化匹配负载,减少电网电能使用的目的。在并网运行时受到光照、温度和负荷投切等影响时,功率流动方向会随机变化,直流电网电压发生波动从而影响系统的稳定性,储能变流器(power conversion system,pcs)作为该系统的重要组成部分,其控制策略的优劣直接决定了储能系统是否能稳定运行。
3、在储能变流器(pcs)的控制算法中,传统的pi控制是线性算法,易于实现但难以达到理想的控制效果,因此国内外学者提出了许多非线性的控制。有文献提出了一种lcl型变流器的滑模控制策略,提高了风电变流器电网电压不平衡故障下的运行稳定性,但是滑模控制会引起抖振问题,使得系统能耗增加;还有文献在变流器上提出了一种基于干扰观测器的无偏置模型预测控制算法,该控制算法克服了传统电压定向控制策略的缺点,但是由于计算量较大且参数众多,实际应用受限;另有文献在t型三电平变流器上提出了一种能量成型控制策略抑制了谐波畸变并实现了较好的功率跟踪性能,但由于能量成型控制器是基于数学模型来设计的,因此对数学模型精度要求较高,在现实中难以获得;有文献提出了一种自适应算法和模糊控制相结合的控制策略提高了储能变流器的动态和稳态性能,但模糊控制规则中的模糊子集和隶属度函数选择缺少响应的理论根据和数学推导,需要凭经验设计。
4、在众多非线性控制中,自抗扰控制(active disturbance rejection control,adrc)不需要知道系统的精确模型,是一种以扩张状态观测器(extended state observer,eso)为核心的非线性控制策略,通过估计系统的内外部总扰动并加以补偿,提升了系统的控制精度,在电力电子领域中广泛使用。微分平坦控制(differential flatness basedcontrol,dfbc)是针对非线性系统提出的一种新型控制理论,具有能精准跟随参考轨迹的优点,该理论加入了误差反馈故也无需知道系统精确模型,目前dfbc在各个领域均有相关的应用。在系统实际运行过程中,受各种环境因素影响,电容和电感的实际值并不为标称值。因此,将以上两种控制策略应用于pcs中可以在系统参数估计不准确情况下依旧获得良好的控制效果以满足实际需求。
技术实现思路
1、本发明的目的是提供基于平坦理论的储能变流器改进自抗扰控制方法,提高负荷随机切投时储能变流器(pcs)的输出功率响应速度,抑制暂态时直流母线电压的波动。
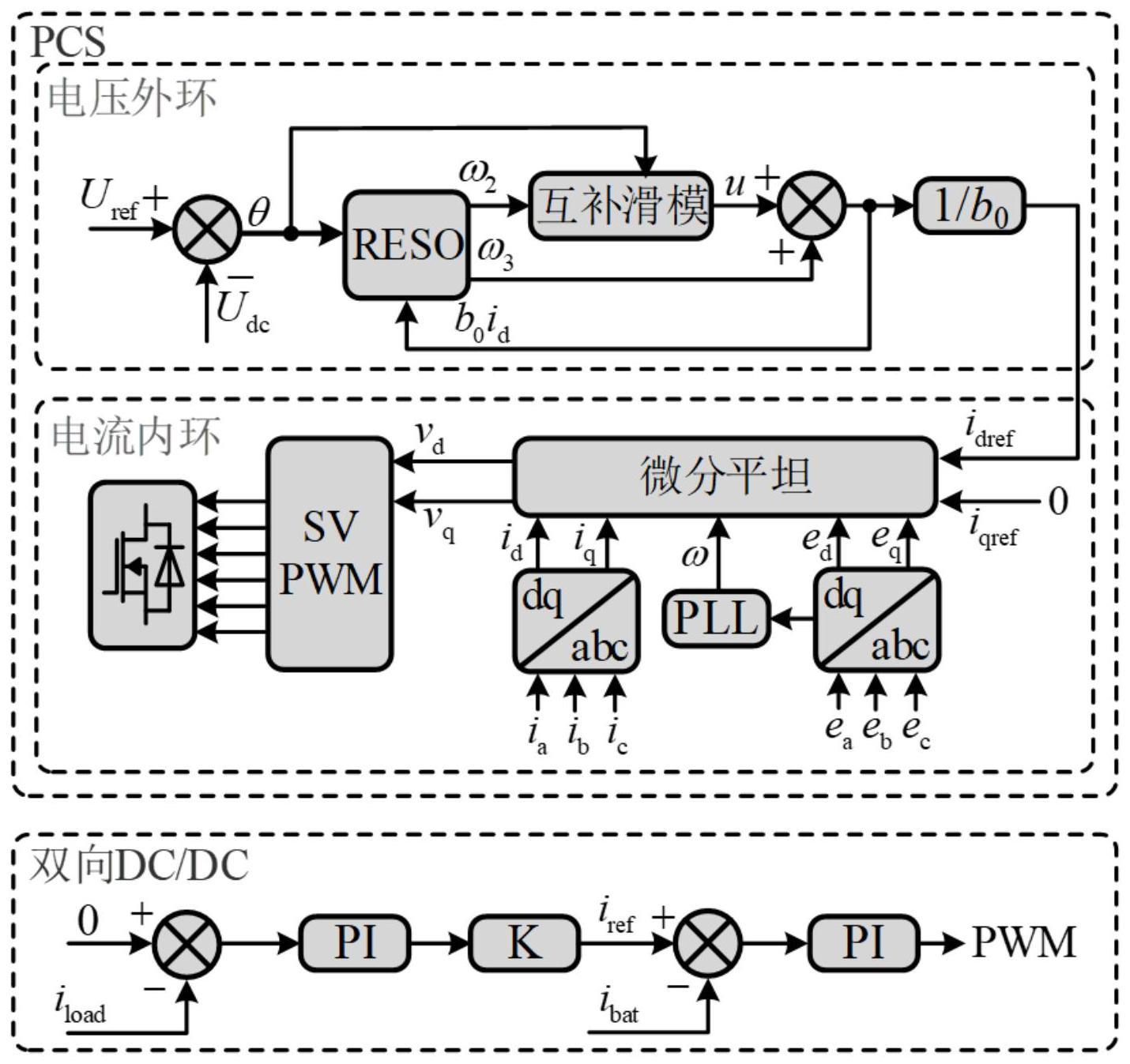
2、本发明所采用的技术方案是,基于平坦理论的储能变流器改进自抗扰控制方法,pcs采用改进的电压外环和电流内环控制,首先,电压外环在传统adrc的基础上,通过更改观测器为降阶扩张状态观测器reso;通过互补滑模csmc来设计状态误差反馈律,并在csmc的指数趋近律中添加滑模面函数,将符号函数更改为双曲正切函数,使得系统状态在远离滑模面时,趋近速度接近无穷,而靠近滑模面时,趋近速度接近零;其次,dfbc应用于电流内环,将交流侧电流和电压的数学关系式变为符合平坦理论的范式,设计前馈控制器保证控制的快速性,设计反馈补偿器矫正系统输出误差。
3、本发明的特点还在于,
4、具体按照以下步骤实施:
5、步骤1、建立pcs数学模型;
6、步骤2、电压外环控制器设计;
7、步骤2.1、观测器设计;
8、步骤2.2、状态误差反馈律设计;
9、步骤3、电流内环控制器设计。
10、步骤1具体为:
11、储能系统电路包括lc滤波器、pcs和dc/dc变换器,当电网电压三相波形对称时,根据基尔霍夫定律可得pcs在abc三相静止坐标系下的电压和电流方程为:
12、
13、式(1)中,l和c分别为滤波器的电感和电容,r为电感的寄生电阻,ia、ib、ic为交流侧电流,ea、eb、ec为电网侧电压,ua、ub、uc为交流侧pcs各相的电压,开关管t1-t6构成了pcs的主体结构,cdc为直流侧稳压电容,iout是pcs输入到双向dc/dc变换器的电流,iload为交流负载的相电流,ibat为储能电池输出电流,sk为晶闸管工作状态的开关函数,定义为:
14、
15、通过park变换可得在两相旋转坐标系下的电压和电流方程为:
16、
17、式(3)中,ω为电网电压的角频率,vd、id、sd分别为交流侧在d轴上的电压、电流、开关函数;vq、iq、sq分别为交流侧在q轴上的电压、电流、开关函数。
18、步骤2.1具体为:
19、根据状态观测器的思想,将影响被控对象的总扰动扩张成新的状态变量加以补偿,对udc求二阶导,由式(3)可得:
20、
21、式(4)中,f为系统的总扰动,b为系统的输入增益;
22、定义直流母线电压跟踪误差θ为:
23、θ=uref-udc (5)
24、联立式(4)和式(5)得:
25、
26、式(6)中,b0为系统输入增益的估计值,将剩余部分定义为扰动fd,
27、将fd扩张为新的状态变量,令x1=θ,x3=fd,进而系统的状态方程表示为:
28、
29、针对式(7)所示状态方程设计观测器eso为:
30、
31、式(8)中,β1、β2、β3为观测器增益,分别为x1、x2、x3的估计值;
32、将观测器进行降阶处理,基于式(8),reso设计为:
33、
34、式(9)中,l1、l2为reso的增益,ψ2、ψ3分别为x2、x3的估计值,中间变量z2、z3满足:
35、
36、定义ω0为reso的观测器带宽,则l1、l2满足:
37、
38、步骤2.2具体为:
39、定义广义滑模面sg(t)为:
40、
41、式(12)中,η是滑模面常数,满足η>0;
42、设计与广义滑模面正交的互补滑模面sc(t)为:
43、
44、令滑模面s(t)=sc(t)+sg(t),由式(12)和式(13)求得:
45、
46、基于等效控制方法,令由式(14)得:
47、
48、联立式(6)和式(15),设计等效控制律ueq为:
49、
50、设计改进指数趋近律为:
51、
52、式(18)中ε、q为常数,满足ε>0,q>0;
53、由式(17),切换鲁棒控制律设计为:
54、
55、联立式(16)和式(19)得:
56、
57、式(20)中,u=η[2ψ2+ηθ+sg(t)]+εf(s)tanh(s)+qs。
58、步骤3具体为:
59、在pcs的内环设计过程中,为保证交流侧电流能跟踪外环输入参考电流,选取并网侧电流[id,iq]t=[xd,xq]t=[yd,yq]t为状态变量和平坦输出量,并网侧电压[vd,vq]t=[ud,uq]t为输入控制变量,由式(3)可得:
60、
61、
62、式(23)和式(24)表明在该种情况下变换器具有微分平坦性,按照微分平坦理论设计控制器;
63、微分平坦理论的控制设计主要分为前馈参考控制和反馈误差消除,前馈控制是根据系统平坦输出参考值轨迹得到的输入量,定义d轴和q轴的并网侧参考电流分别为xdref、xqref,则系统的前馈控制量为:
64、
65、由于系统建模往往是不精准的,加之系统内外部可能存在扰动,因此平坦输出会与参考轨迹产生误差,因此需要加入反馈误差消除这一部分的影响,校正平坦输出;
66、定义控制变量的误差为:
67、
68、定义d轴和q轴的耦合项是系统干扰,引入pi控制器消除误差,得反馈误差消除关系式为:
69、
70、式(27)中,[δyd*,δyq*]t=0为状态变量误差的参考值,kd、kq为pi控制器的增益,td、tq为pi控制器的时间常数;
71、综上,系统电流内环的微分平坦输入控制量为:
72、
73、本发明的有益效果是:
74、本发明基于平坦理论的储能变流器改进自抗扰控制方法,能更好的抑制直流母线电压波动并减小暂态时间;减小了储能电池功率突变和充放电状态切换时pcs交流侧输出功率的响应时间;降低了系统输出谐波含量,使得输出电流的thd有所减小,改善了pcs交流侧的输出电能质量。
- 还没有人留言评论。精彩留言会获得点赞!