一种车辆暖机控制方法、系统、设备及终端与流程
本发明属于发动机暖机,具体涉及一种车辆暖机控制方法、系统、设备及终端。
背景技术:
1、北方地区的冬季气温低(≤-10℃),车辆启动后,由于发动机、电机、传动轴齿、制动盘等运动部件机油温度低润滑差,液压系统低温控制精度差,整车振动频率和零部件模态点重合,导致零部件异响。
2、现有技术公开了工作温度对整车怠速nvh的影响及控制,分析了低温冷机工况下橡胶材料隔振性能、发动机转速策略对整车nvh的影响,并通过调整怠速暖机转速改善nvh性能。其技术不足在于没有考虑暖机时间对燃油经济性的影响。
3、现有技术公开了远程暖机的控制方法、系统及其装置,提出了远程暖机的控制方法、系统及其装置,其通过车端-云端-客户终端三层架构,便捷了车端控制并提高了发动机性能。其技术不足在于没有对暖机结束过程精确控制。
4、现有技术公开了一种评价整车暖机工况nvh性能的方法,提出了一种评价整车暖机工况nvh性能的方法,通过转速波动情况、车体共振、暖机状态、常用转速噪声成分分析,有效改善暖机噪声偏大问题。
5、上述现有技术均没有对暖机结束时间做精确控制,导致燃油经济性(或者电耗)增加。
技术实现思路
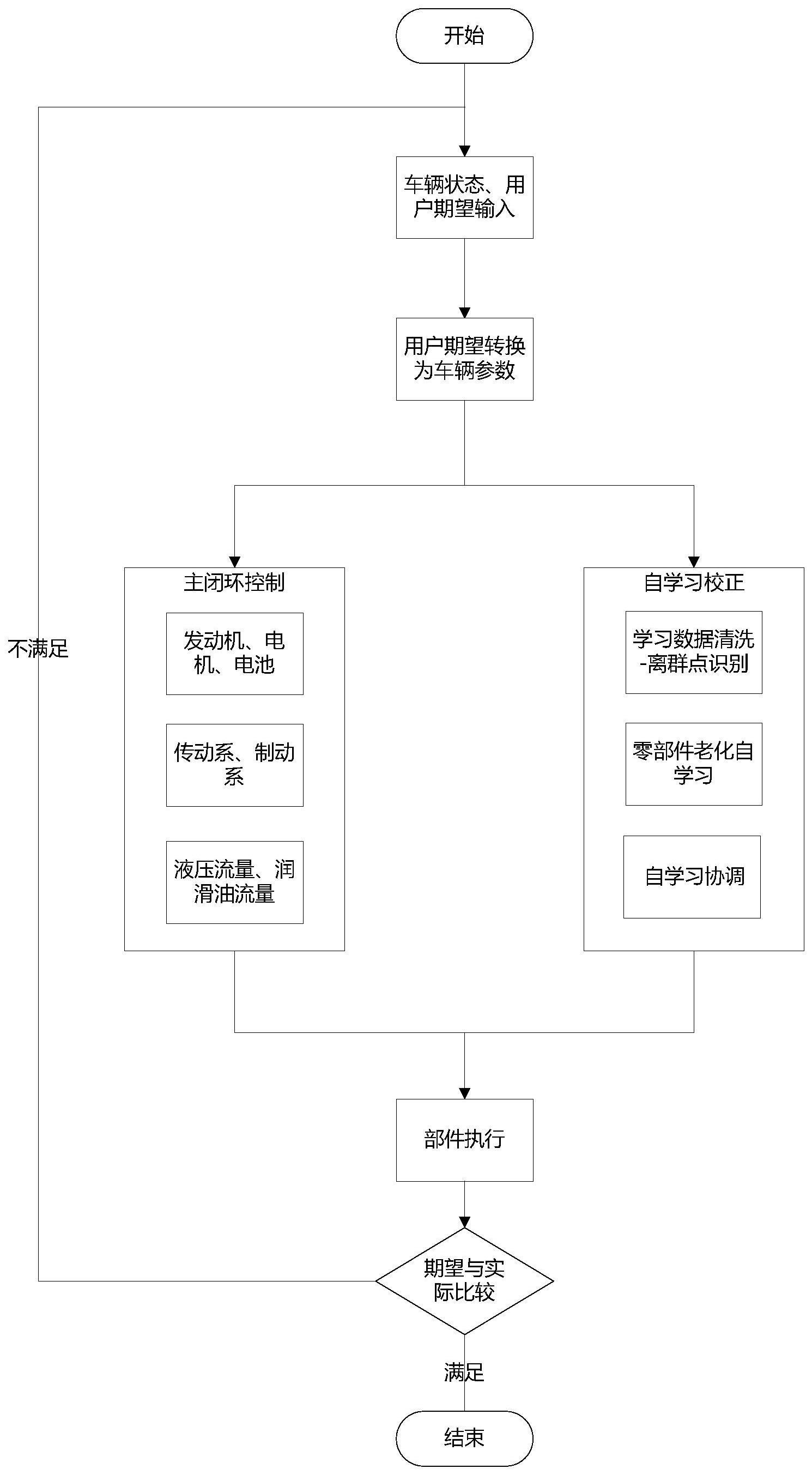
1、针对现有技术中存在的液压系统低温控制精度差,整车振动频率和零部件模态点重合,导致零部件异响,nvh品质差等问题,本发明提供了一种车辆暖机控制方法、系统、设备及终端,该系统及方法采用采集装置获取整车及环境信息,以发动机、电机、电池状态信息为代表,控制、校正装置通过暖机主闭环、自学习修正辅助闭环,输出暖机控制指令,实现车辆暖机。
2、本发明通过如下技术方案实现:
3、一种车辆暖机控制方法,具体包括如下步骤:
4、步骤一:获取整车状态信息及环境状态信息;并通过整车状态信息及环境状态信息计算发动机起动之后的发动机水温、电机运转之后的电机温度、电池充放电过程的电池温度;
5、步骤二:获取用户期望的车辆表现,并将所述车辆表现转化为工程数据;
6、步骤三:根据所述工程数据及测量反馈装置的测量值,采用闭环偏差控制策略对相应的车辆的各个部件的工作参数进行调整,并采用自学习校正算法得出校正的控制补偿参数,然后将所述控制工作参数与所述控制补偿参数的和发送给被控车辆的各部件进行执行。
7、进一步地,步骤一中,所述整车状态信息包括:发动机水温、电机温度、电池温度、电池soc、传动系状态、制动系状态;环境状态信息包括:环境温度、海拔高度、环境湿度。
8、进一步地,步骤三中,所述闭环偏差控制策略通过串联校正装置实现,所述自学习校正算法通过并联校正装置实现,其中,串联校正装置用于发动机进气、喷油、点火,电机励磁电流、三相电压,传动系结合、断开及滑膜,制动系制动缸压、润滑流量控制阀的校正;并联校正装置用于对串联校正装置的输出参数进一步校正;
9、所述各部件进行执行,其中,执行部件包括发动机、电机、电池、整车热管理模块、传动系、制动系零部件;
10、测量反馈装置测量发动机水温、电机温度、电池温度、电池soc、传动系状态、制动系状态,实现用户期望值闭环。
11、进一步地,步骤三中,采用闭环偏差控制策略对相应的车辆的各个部件的工作参数进行调整,具体包括如下内容:
12、通过热平衡进行调控,采用如下公式:
13、pc=p1+p2+p3+…+pn (1)
14、式中,pi表示热源放热功率(单位:w),热源包括发动机p1、电机p2、电池p3;其中,p1包括工质与缸壁的传热传给冷却液的热功率、废气通过排气管路传给冷却液的热功率、活塞与缸壁摩擦传给冷却液的热功率、润滑油传给冷却液的热功率之和;p2包括功率电路传给冷却液的热功率、电机定转子和轴齿传给冷却液的热功率之和;p3包括电池充电时传给冷却液的热功率、正常工作时传给冷却液的热功率之和;pi通过实验获得;
15、进一步,
16、
17、qt=b*hu (4)
18、p1=qt*ηc (5)
19、式中,qc表示从时间ti1到ti2的冷却液吸收的热量(单位:j),qci表示冷却液流量(单位:kg/s),cci冷却液的比定压热容(单位:j/(kg*k)),qt表示发动机单位时间放出的热量(单位:w),b表示单位时间耗油量(单位:kg/s),hu表示燃料低热值(单位:j/kg),ηc表示热传导系数,ti1表示开始加热的时间,ti2表示结束加热的时间;各个部件的最佳工作温度不同,通常发动机高于电机,电机高于电池;各个部件的加热时间为(ti2-ti1);
20、各个部件的目标工作状态即为用户期望值转化的工程数值,基于以上各式可以求出各个部件的执行控制向量t;同时考虑自学习值δt;执行装置按照向量t’=t+δt执行,如此完成闭环控制。
21、进一步地,步骤三中,所述采用自学习校正算法得出校正的控制补偿参数,具体包括如下内容:
22、(1)、离群点识别,通过以下公式实现:
23、
24、δxi-1=|xi-1-xi-2| (7)
25、
26、
27、式中,xth表示比较的阈值,其代表上1次、上k次的变化量加权和值;δxi-1表示上1次的变化量;表示上k次的变化量均值;将f(xi)=0的向量作为神经网络自学习的输入向量,若f(xi)=1表示是离群点,则不输入自学习模块;
28、(2)、零部件老化自学习;
29、将步骤(1)得到的输入向量传输给神经网络进行自学习,隐含层的输入输出关系如下:
30、
31、
32、式中,wi,j(t)为权值,bi(t)为偏置值。
33、反馈层的输入输出关系如下:
34、nii(t+1)=yi(t) (12)
35、yii(t+1)=wi(t)ni(t) (13)
36、式中,wi(t)为权值;
37、输出层的输入输出关系如下:
38、
39、yk(t)=f(nk(t))=nk(t) (15)
40、式中,wkj(t)为权值,bk(t)为偏置值。
41、(3)、自学习协调;
42、将老化自学习得到的单个部件的学习值进行加权处理,得到最终的各部件的控制补偿参数,具体采用如下公式:
43、
44、
45、式中,cij表示协调系数可标定,0≤cij≤1,hkq表示中间计算元素,δti表示作用在第i个部件的最终参数,部件可以是发动机、电机、流量球阀、液压电磁阀等。
46、第二方面,本发明还提供了一种车辆暖机控制系统,用于实现上述方法,包括:
47、第一获取模块,用于获取整车状态信息及环境状态信息;
48、第二获取模块,用于获取用户期望的车辆表现,并将所述车辆表现转化为工程数据;
49、闭环偏差控制模块,用于根据所述工程数据,对相应的车辆的各个部件的工作参数进行调整;
50、自学习模块,用于通过自学习得出校正的控制补偿参数;
51、执行模块,用于根据计算模块发送的控制量执行车辆的各部件。
52、第三方面,本发明还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如本发明实施例中任一所述的一种车辆暖机控制方法。
53、第四方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例中任一所述的一种车辆暖机控制方法。
54、与现有技术相比,本发明的优点如下:
55、本发明的一种车辆暖机控制方法、系统、设备及终端,该系统及方法采用采集装置获取整车及环境信息,以发动机、电机、电池状态信息为代表,控制、校正装置通过暖机主闭环、自学习修正辅助闭环,输出暖机控制指令,实现车辆暖机;本发明通过自学习校正算法,识别离群点、开展神经网络自学习、自学习权值协调以得出校正控制补偿参数,配合主闭环控制,达成车辆最终控制效果。
- 还没有人留言评论。精彩留言会获得点赞!