基于数字孪生与平行控制器的无人艇路径操纵控制系统与方法与流程
本发明涉及无人艇路径操纵控制领域,特别是一种基于数字孪生与平行控制器的无人艇路径操纵控制系统与方法。
背景技术:
1、路径操纵控制又称路径跟踪控制,是无人艇运动控制中的一个基本问题。路径操纵控制问题涉及两个控制目标,分别为几何控制目标和动态控制目标。其中,几何控制目标用于满足输出空间的空间需求,而动态控制目标用于满足路径上的动态行为要求。与轨迹跟踪控制相比,路径操纵控制中时间约束和空间约束是相互解耦的,这使得路径参数更新律的设计更加灵活,以便获得更好的控制性能。由于路径操纵控制问题在无人艇领域的广泛应用,近年来相关学者从不同角度对其进行了研究,其中包括对单无人艇系统的研究和对多无人艇系统的研究。
2、现有关于无人艇路径操纵控制方法中,存在如下问题:
3、第一,现有无人艇路径操纵控制方法仅考虑物理空间下的实际无人艇系统系统,未考虑物理空间和信息空间共融环境,难以实现物理空间和信息空间下实际无人艇系统系统和虚拟无人艇系统的高效协同和优化控制。
4、第二,现有无人艇路径操纵控制方法大多基于实际无人艇系统系统的传感数据单向更新运动模型,缺少运动模型向实际无人艇系统系统的信息流动,无法实现实际无人艇系统系统和虚拟无人艇系统的双向数据流动与同步映射。
5、第三,现有无人艇路径操纵控制方法大多基于仿真或实验来验证所设计的控制器性能,该过程通常独立于实际执行系统,缺乏实时反馈和控制策略优化。
技术实现思路
1、为解决现有技术中无人艇路径操纵控制方法中存在的未考虑物理空间和信息空间共融环境、缺少运动模型向实际无人艇系统系统的信息流动,实际执行系统缺乏实时反馈和控制策略优化的技术问题,本发明提出了一种基于数字孪生与平行控制器的无人艇路径操纵控制系统。
2、本发明的技术方案如下:
3、一种基于数字孪生与平行控制器的无人艇路径操纵控制系统,
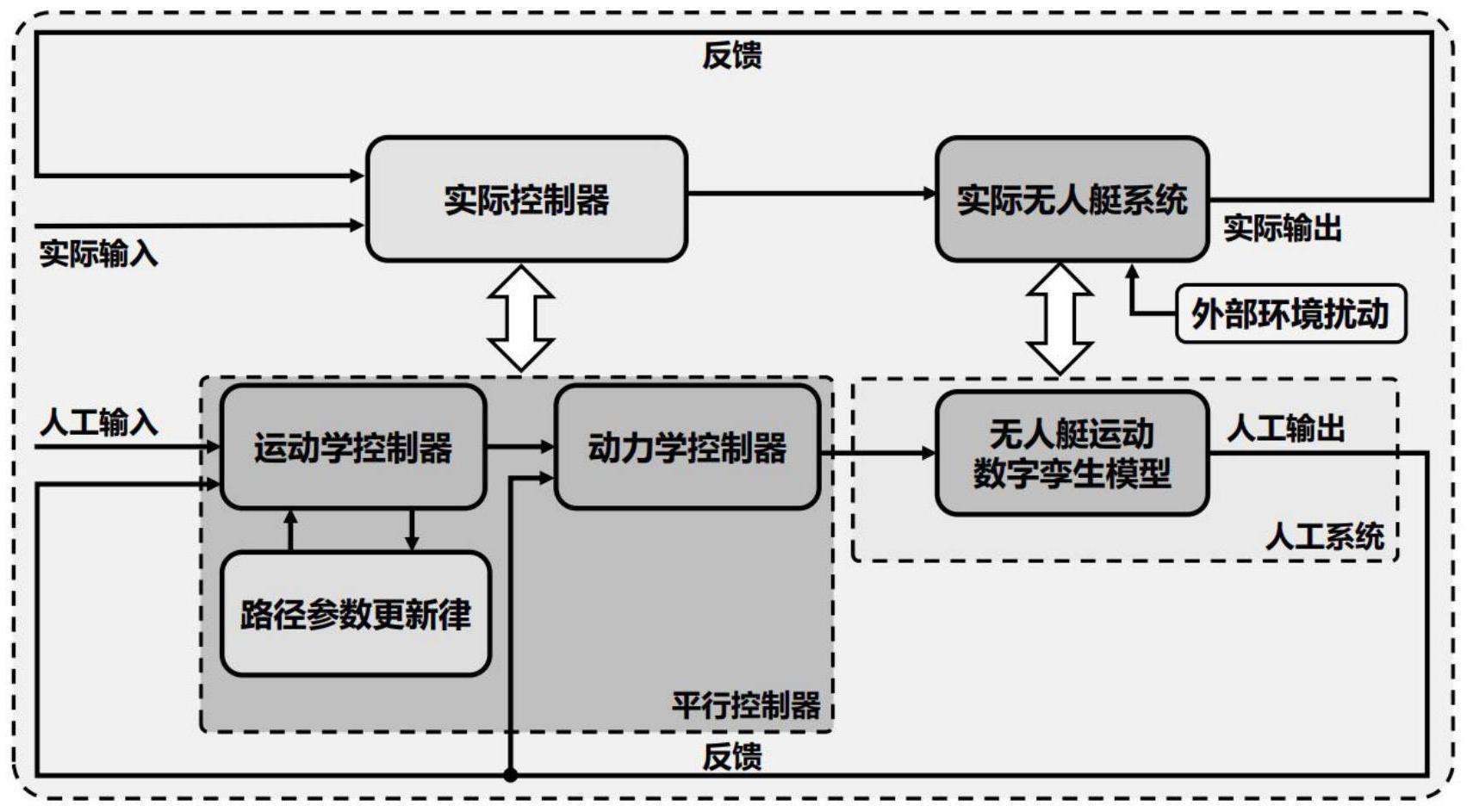
4、包括:实际无人艇系统、生成控制输入对实际无人艇系统进行控制的实际控制器、生成虚拟无人艇的位置信息的无人艇运动数字孪生模型、产生无人艇制导信号的运动学控制器、根据制导信号和当前时刻虚拟无人艇的速度信息生成控制输入对由无人艇运动数字孪生模型构成的人工系统进行控制的动力学控制器、提供无人艇路径参数的路径参数更新律;
5、所述的实际无人艇系统输入端与所述的实际控制器输出端相连,输出端与实际控制器输入端相连;
6、所述的实际控制器输入端分别与包含无人艇实际参考路径的位置信息和航向信息的实际输入端和所述的实际无人艇系统的输出端相连,输出端与所述的实际无人艇系统的输入端相连;
7、所述的无人艇运动数字孪生模型输入端与所述的动力学控制器输出端相连,输出端分别与所述的运动学控制器和动力学控制器输入端相连;
8、所述的运动学控制器输入端分别与包含无人艇虚拟参考路径的位置信息和航向信息的人工输入端、所述的路径参数更新律和无人艇运动数字孪生模型的输出端相连,输出端分别与所述的动力学控制器和路径参数更新律的输入端相连;
9、所述的动力学控制器输入端分别与所述的运动学控制器和无人艇运动数字孪生模型的输出端相连,输出端与所述的无人艇运动数字孪生模型输入端相连;
10、所述的路径参数更新律输入端与所述的运动学控制器输出端相连,输出端与所述的运动学控制器输入端相连。
11、优选的,所述的实际无人艇系统数学模型用下式表示:
12、
13、其中,η=[x,y,ψ]t∈r3为无人艇的位置信息和艏摇角信息;[·]t代表矩阵或向量的转置;v=[u,v,r]t∈r3为无人艇的纵向速度、横向速度和艏摇角速度;m∈r3×3为无人艇的惯性矩阵,m*∈r3×3为m的标定值;τ=[τu,τv,τr]t∈r3为无人艇的控制输入;r(ψ)∈r3×3为旋转矩阵,表示为:
14、
15、σ∈r3为系统总扰动,表示为:
16、σ=m-1(-c(v)v-d(v)v+τw)+(m-1-(m*)-1)τ
17、其中,c(v)∈r3×3为向心力和科里奥利力系数矩阵;d(v)∈r3×3为水动力阻尼矩阵;τw=[τuw,τvw,τrw]t∈r3为时变风浪流产生的扰动。
18、优选的,所述无人艇运动数字孪生模型包括:
19、无人艇运动数字孪生模型的输入信号为实际无人艇系统的位置信息η,速度信息v,虚拟无人艇的控制输入τ;输出信号为人工系统中数字孪生模型中虚拟无人艇的位置信息速度信息系统总扰动估计值
20、所述的无人艇运动数字孪生模型设计如下:
21、
22、其中,k1∈r,k2∈r,k3∈r为控制增益。
23、优选的,所述运动学控制器包括:
24、运动学控制器的输入信号为包含无人艇实际参考路径的位置信息和航向信息的人工输入端ηd(w)、路径参数w、人工系统中数字孪生模型中虚拟无人艇的位置信息输出信号为人工系统中数字孪生模型的路径跟踪误差ηe和制导信号vc;
25、所述的运动学控制器设计如下:
26、
27、其中,kc1∈r3×3是增益系数矩阵,是饱和项,δ1∈r+是设计参数。
28、优选的,所述路径参数更新律包括:
29、路径参数更新律的输入信号为人工系统中数字孪生模型的路径跟踪误差ηe;输出信号为路径参数w;
30、所述的路径更新律的设计如下:
31、
32、其中,ws为期望的路径更新速率,α,β∈r+为给定设计参数,ρ为可变设计参数。
33、优选的,所述动力学控制器包括:
34、动力学控制器的输入信号为人工系统中数字孪生模型中虚拟无人艇的速度信息制导信号vc,系统总扰动的估计值输出信号为控制输入向量τ;
35、所述的动力学控制器设计如下:
36、
37、其中,kc2∈r3×3是增益系数矩阵,是饱和项,δ2∈r+是设计参数。
38、优选的,所述实际控制器通过拷贝人工系统中数字孪生模型中的平行控制器获得,二者互为镜像关系。实际控制器的输入输出信号均与人工系统中数字孪生模型中的平行控制器保持一致。
39、一种基于数字孪生与平行控制器的无人艇路径操纵控制方法:
40、s1:构建无人艇路径操纵控制系统:所述系统包括:实际无人艇系统、生成控制输入对实际无人艇系统进行控制的实际控制器、生成虚拟无人艇的位置信息的无人艇运动数字孪生模型、产生无人艇制导信号的运动学控制器、根据制导信号和当前时刻虚拟无人艇的速度信息生成控制输入对由无人艇运动数字孪生模型构成的人工系统进行控制的动力学控制器、提供无人艇路径参数的路径参数更新律;
41、s2:虚拟无人艇的信号传输:将人工输入和当前时刻无人艇运动数字孪生模型给出的虚拟无人艇的位置信息传递给运动学控制器,同时路径参数更新律会提供路径参数w、运动学控制器产生制导信号vc传递给动力学控制器;动力学控制器根据制导信号vc和当前时刻虚拟无人艇的速度信息生成控制输入τ对由无人艇运动数字孪生模型构成的人工系统进行控制;
42、s3:实际无人艇系统的信号传输:将实际输入和虚拟无人艇的状态信息一同输入到实际控制器中,实际控制器生成控制输入τ对实际无人艇系统进行控制。
43、与现有技术相比,本发明具有以下有益效果:
44、本发明提供了一种基于数字孪生与平行控制器的无人艇路径操纵控制系统与方法,所述系统包括:实际无人艇系统、生成控制输入对实际无人艇系统进行控制的实际控制器、生成虚拟无人艇的位置信息的无人艇运动数字孪生模型、产生无人艇制导信号的运动学控制器、根据制导信号和当前时刻虚拟无人艇的速度信息生成控制输入对由无人艇运动数字孪生模型构成的人工系统进行控制的动力学控制器、提供无人艇路径参数的路径参数更新律;
45、本发明所设计的平行控制器将构建的信息空间中的虚拟无人艇系统融入环境,同时驱动虚拟无人艇系统和实际无人艇系统,实现两个系统之间的相互映射与虚实交互。
46、本发明中人工系统中数字孪生模型基于实际无人艇更新状态信息并根据所设计的平行控制器实现对实际无人艇系统的路径操纵控制,实现了实际无人艇系统和虚拟无人艇系统的双向数据流动与同步映射。
47、第三,本发明所设计的平行控制器能够基于构建的人工系统中数字孪生模型进行计算实验,通过对人工系统中数字孪生模型进行推演仿真,实现了对所设计的平行控制器性能的动态评估与优化。
- 还没有人留言评论。精彩留言会获得点赞!