一种飞行器预设时间高精度扰动观测方法
本发明涉及一种针对飞行器所受扰动的预设时间高精度观测方法,通过时域投影算法设计扰动观测项,实现扰动观测误差在预设时刻的快速精确收敛。
背景技术:
1、飞行器由于参数不确定性及耦合性强、模型非线性强、外界干扰复杂等原因,受到复杂多变的扰动。为实现飞行器的高精度控制,需对扰动进行快速而精确的观测,因此需要开发一种快速而准确的扰动观测方法。
技术实现思路
1、为解决背景技术中存在的问题,本发明提供一种飞行器预设时间高精度扰动观测方法。
2、为实现上述目的,本发明采取的技术方案如下:
3、一种飞行器预设时间高精度扰动观测器,所述方法为:
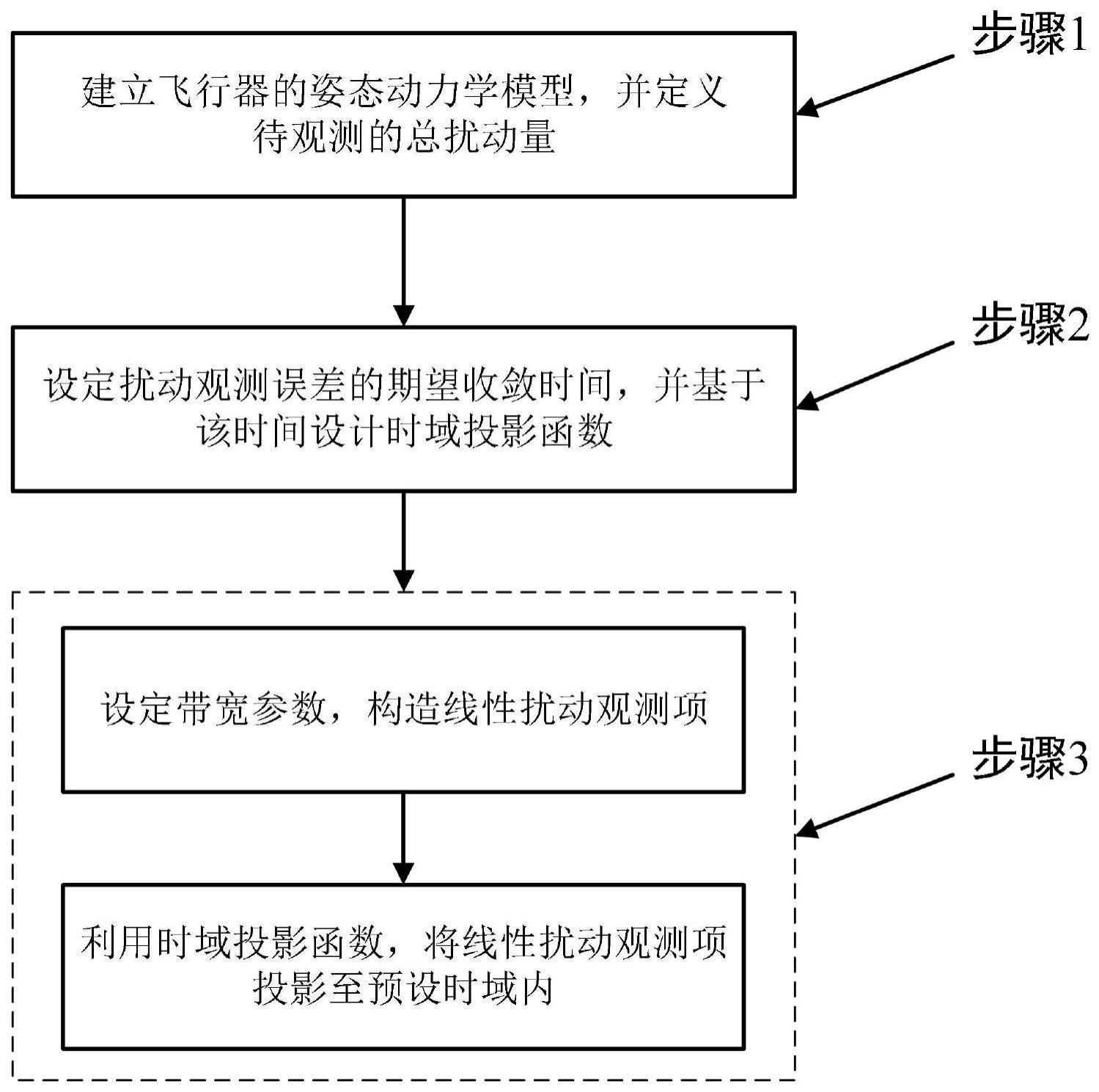
4、步骤一:建立飞行器的姿态动力学模型,并定义待观测的总扰动量;
5、步骤二:设定扰动观测误差的期望收敛时间,并基于该时间设计时域投影函数;
6、步骤三:设定线性扰动观测项的带宽参数,利用时域投影函数,将线性扰动观测项投影至预设时域内,完成预设时间高精度扰动观测器的设计。
7、进一步地,所述步骤一具体为:
8、步骤一一:基于绕质心转动动力学和姿态运动学,构建飞行器姿态动力学与运动学模型为:
9、
10、式中:为ω关于时间的一阶导数;为飞行器的姿态角矢量;为俯仰角;ψ为偏航角;γ为滚转角;
11、r为姿态转换矩阵,
12、为ω关于时间的一阶导数;ω=[ωx,ωy,ωz]t为飞行器的姿态角速度矢量;ωx为滚转角速度;ωy为偏航角速度;ωz为俯仰角速度;
13、j为飞行器的转动惯量矩阵,且
14、jxx为飞行器绕x轴的转动惯量;jyy为飞行器绕y轴的转动惯量;jzz为飞行器绕z轴的转动惯量;jxy为飞行器对x和y轴的惯性积,jxz为飞行器对x和z轴的惯性积,jyz为飞行器对y和z轴的惯性积;ω×表示叉乘矩阵;b1为控制力矩系数矩阵;u=[δx,δy,δz]t表示控制输入量;δx为副翼的偏转角;δy为方向舵的偏转角;δz为升降舵的偏转角;d1=[dx,dy,dz]t为气动力矩与干扰力矩项;dx为作用在滚转通道的气动力矩与干扰力矩项;dy为作用在偏航通道的气动力矩与干扰力矩项;dz为作用在俯仰通道的气动力矩与干扰力矩项;
15、步骤一二:将姿态动力学与运动学模型和姿态指令作差,形成姿态控制误差模型:
16、设定飞行器姿态角变化指令ωc为ωc=[ωcz,ωcy,ωcx],式中:ωcz为俯仰通道指令;ωcy为偏航通道指令;ωcx为滚转通道指令;
17、定义姿态角跟踪误差x1及姿态角跟踪误差对时间的一阶导数x2为:
18、
19、式中:为ωc关于时间的一阶导数;
20、将式(1)转化为姿态控制误差模型
21、
22、式中:b=rj-1b1为控制矩阵;为待观测的总干扰;为ωc关于时间的二阶导数。
23、进一步地,所述步骤二具体为:记扰动观测误差的期望收敛时间为tc,时域投影函数设计为-α-1ln(1-t/tc),其中α>0为时域投影函数的系数,t为时间,ln为自然对数符号。
24、进一步地,所述步骤三具体为:
25、步骤三一:记线性扰动观测器的带宽参数为ω0,则线性扰动观测项设计为:
26、
27、式中:ω0为线性扰动观测项的带宽参数,e1表示对状态量x1的观测误差,表示第一个线性扰动观测项,表示第二个线性扰动观测项,表示第三个线性扰动观测项,表示第四个线性扰动观测项;
28、步骤三二:基于线性扰动观测器和时域投影函数,预设时间高精度扰动观测器设计为
29、
30、式中:z1为对状态量x1的观测值;z2为对状态量x2的观测值;z3为对扰动量h的观测值;z4为对扰动量导数的观测值;
31、为切换函数,0≤t<tc时t≥te时
32、h1,h2,h3,h4为0≤t<tc时第1-4个扰动观测项,表达式为
33、
34、β>0为误差放大系数;
35、k(t)的表达式为
36、θ1,θ2,θ3,θ4为t≥tc时第1-4个扰动观测项,表达式为
37、θ1=k1l1/4|e1|3/4sign(e1),θ2=k2l1/2|e1|1/2sign(e1)
38、θ3=k3l3/4|e1|1/4sign(e1),θ4=k3lsign(e1);
39、sign为符号函数;k4>1,l>0。
40、与现有技术相比,本发明的有益效果是:传统扰动观测方法的观测误差收敛时间无法由单一参数预先设定,为设计过程带来不利影响。本发明所给出的扰动观测方法可使观测误差收敛时间由单个参数直接决定,从而简化了设计过程,提高了观测速度,且可同时实现对扰动值和扰动一阶导数值的精确观测。
技术特征:
1.一种飞行器预设时间高精度扰动观测器,其特征在于:所述方法为:
2.根据权利要求1所述的一种飞行器预设时间高精度扰动观测器,其特征在于:所述步骤一具体为:
3.根据权利要求1所述的一种飞行器预设时间高精度扰动观测器,其特征在于:所述步骤二具体为:记扰动观测误差的期望收敛时间为tc,时域投影函数设计为-α-1ln(1-t/tc),其中α>0为时域投影函数的系数,t为时间,ln为自然对数符号。
4.根据权利要求1所述的一种飞行器预设时间高精度扰动观测器,其特征在于:所述步骤三具体为:
技术总结
一种飞行器预设时间高精度扰动观测方法,所述方法为:建立飞行器的姿态动力学模型,并定义待观测的总扰动量;设定扰动观测误差的期望收敛时间,并基于该时间设计时域投影函数;设定线性扰动观测项的带宽参数,利用时域投影函数,将线性扰动观测项投影至预设时域内,完成预设时间高精度扰动观测器的设计。传统扰动观测方法的观测误差收敛时间无法由单一参数预先设定,为设计过程带来不利影响。本发明所给出的扰动观测方法可使观测误差收敛时间由单个参数直接决定,从而简化了设计过程,提高了观测速度,且可同时实现对扰动值和扰动一阶导数值的精确观测。
技术研发人员:韦常柱,詹韬,张义忠,李强,徐世昊,浑陆
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!