一种用于船舶连续路径跟踪的圆弧路径生成方法
本发明属于船舶动力定位控制,尤其涉及一种用于船舶连续路径跟踪的圆弧路径生成方法。
背景技术:
1、铺管船作为一种特殊的工程船舶,主要用来进行海洋管道的铺设作业,尤其是深水管道的铺设。铺管任务有多种施工方法,常见的有铺管船法、漂浮铺管法、底托法、卷筒式铺管法、开沟铺管法等。由于铺管船机动性好、适用性强等特点,其施工工艺也较为成熟,铺管船法是目前世界上海底管线铺设工程中应用最广泛的一种方法。
2、铺管作业任务是船舶沿着期望的轨迹或者沿着预先设定好的路径进行循迹,按照设定的速度与航向运动,由此实现对海底管道的铺设。铺管前,需要规划出从起点到终点的最优路径,考虑铺管成本及输油效率因素,理想路径通常连接起点和终点的直线路径,但是综合考虑根据海床平整性、水面障碍物等情况,往往采用圆弧路径过渡的方式避开这些障碍,因此铺管路径一般体现为直线加圆弧的复合路径。本发明的内容针对于铺管船法,研究铺管船在铺管作业时铺管路径的生成,以便直观地对比实际轨迹与预计轨迹的偏差。
3、为了实现其任务需求,本发明根据存储在航点表中的航点生成连续的预计铺管路径,结合los(line-of-sight)视线导引算法设计了船舶路径生成方法,从而可以直观地对比实际轨迹与预计轨迹的偏差。
技术实现思路
1、本发明提供一种用于船舶连续路径跟踪的圆弧路径生成方法,用于在模块化的程序中输出过渡圆弧路径的三点坐标,以便利用画图命令在qt程序中将规划出的直线加圆弧路径画出预计的路径轨迹,从而直观地对比实际轨迹与预计轨迹的偏差。
2、本发明是通过以下技术方案实现的,本发明提出一种用于船舶连续路径跟踪的圆弧路径生成方法,所述方法包括以下步骤:
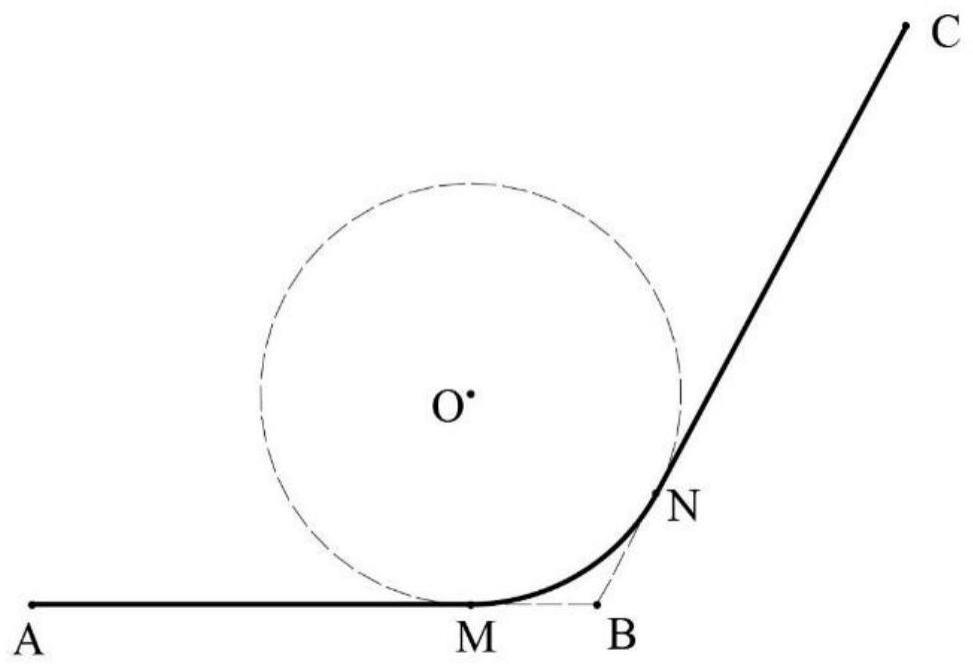
3、第一步,将船舶航点a(n0,e0)点设定为第一段直线路径的起点,船舶航点b(n1,e1)点设定为第一、二段直线路径的拐点,船舶航点c(n2,e2)点设为第二段直径路线的终点;曲线路线的半径为rturn;
4、第二步,计算直线路径ab的角度:
5、
6、第三步,计算直线路径bc的角度:
7、
8、第四步,在两段直线路径之间,船需要回转的角度的计算公式为:
9、αturn=α2-α1
10、第五步,根据αturn的正负来判断船舶在各段路径之间的转向:
11、当αturn>0°时,船舶在第一段到第二段路径之间为右转;当αturn<0°时,船舶在第一段到第二段路径之间为左转;
12、第六步,对αturn做优化处理以实现角度保护功能,让船在两段直线路径的转弯角度始终在180°以内,以此缩减转弯时间,以免耗费不必要的能量:
13、当αturn>180°时,给αturn的值减去360°;当αturn<-180°时,给其值加上360°;
14、第七步,计算直线路径ab的长度:
15、
16、第八步,计算直线路径bc的长度:
17、
18、第九步,判断角度关系:
19、∠mon=αturn、∠mob=∠nob
20、第十步,由第九步可得线段bm、bn、ob的长度计算公式如下:
21、
22、lbn=lbm
23、
24、第十一步,计算在左转时bo的角度,公式如下:
25、此时αturn<0;
26、第十二步,计算在右转时bo的角度,公式如下:
27、此时αturn>0;
28、第十三步,计算o、m、n三点在船体坐标系下的坐标,公式如下:
29、
30、至此在模块化的程序中将o、m、n坐标输出,即可利用画图命令在qt程序中将规划出的直线加圆弧路径画出预计的路径轨迹。
31、本发明具有的有益效果是:
32、本发明仅采用三个航点坐标和转弯半径作为算法的输入,三个点中间存在两段直线路径和一段半径为rturn的圆弧路径,通过该算法,若航点表中输入多个点,通过循环计算,即可不间断地生成直线与圆弧的复合路径。使铺管船完成整条路径生成。具有比较重要的工程应用价值和现实意义。
技术特征:
1.一种用于船舶连续路径跟踪的圆弧路径生成方法,其特征在于,所述方法包括以下步骤:
技术总结
本发明提出一种用于船舶连续路径跟踪的圆弧路径生成方法,具体涉及一种用于动力定位船可以较完美地实现对直线加圆弧路径的生成,并对其模块化。由于在实际工程中,可以直接使用航点表中储存的航点信息,为直观地对比实际轨迹与预计轨迹的偏差,应根据预计的路径生成并显示出来。在本发明中,仅采用三个航点坐标和转弯半径作为算法的输入,三个点中间存在两段直线路径和一段半径为R<subgt;turn</subgt;的圆弧路径,通过该算法,若航点表中输入多个点,通过循环计算,即可不间断地生成直线与圆弧的复合路径。本发明可利用画图命令在Qt程序中将规划出的直线加圆弧路径画出预计的路径轨迹,具有比较重要的工程应用价值和现实意义。
技术研发人员:李新飞,金忠宇,姬洪州,袁利毫,张仁丹,秦飞,崔志彬
受保护的技术使用者:哈尔滨工程大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!