适用于复杂楼宇室内环境的足式机器人智能自主探索方法及装置
本发明涉及地面机器人自主探索,具体为适用于复杂楼宇室内环境的足式机器人智能自主探索方法及装置。
背景技术:
1、随着同时定位与建图技术的不断发展,移动机器人已经具备了在陌生环境中独立感知和定位,无需依赖外部传感器的能力,从而使得机器人能够自主执行任务成为可能。在机器人研究领域,机器人的自主探索成为一个热门研究问题,这是基于机器人能够以最小的能量消耗和最短的时间完成对未知环境的探索。机器人的自主探索策略目前主要分为三大类:基于边界的探索策略、基于采样的策略以及混合策略。基于边界的探索策略将已知空间与未知空间的交界处定义为边界,并综合考虑边界的大小、机器人在边界处可能获取的信息增益以及机器人到达边界的能量消耗,从而选择最佳的边界,以引导机器人探索未知环境。然而,这类方法存在计算边界时需要大量计算资源的问题,同时边界更新较为缓慢,并且边界的信息增益计算方法较为复杂。
2、基于采样的探索策略则是在待探索空间中进行均匀或非均匀的采样,构建一个由视点组成的路图,然后计算每个视点的潜在信息增益,规划出信息增益最大的路径并执行。然而,这种方法可能导致机器人在不同路径之间频繁切换,从而降低探索效率。
3、混合探索策略将基于边界的策略和基于采样的策略相结合。这种方法主要包括以下内容:首先,利用基于边界的方法来确定环境中的边界;其次,通过基于采样的策略为每个边界选择视点,并计算每个视点的信息增益,从而选择最优视点;最后,综合考虑每个视点的信息增益以及机器人到达各个视点的能量消耗,选择最佳视点并规划平滑路径进行执行。相对于前两种策略,基于混合策略的方法具有更高的效率。
4、然而,当前阶段尚缺乏适用于多层室内复杂环境高效探索的算法。上述算法在应用于复杂室内环境时,可能导致机器人频繁往返不同楼层,从而降低探索效率。此外,现有的探索算法忽视了室内环境中丰富的语义信息,无法像人类一样,在探索新环境时通过捕捉环境的语义信息,如门、窗、楼梯等,从而预测未探索区域可能的信息增益。因此,在机器人的自主探索中,如何针对多层室内复杂环境实现高效探索,并且充分利用环境中丰富的语义信息以提高自主探索效率,成为一个值得关注且具有实际应用价值的研究领域。
技术实现思路
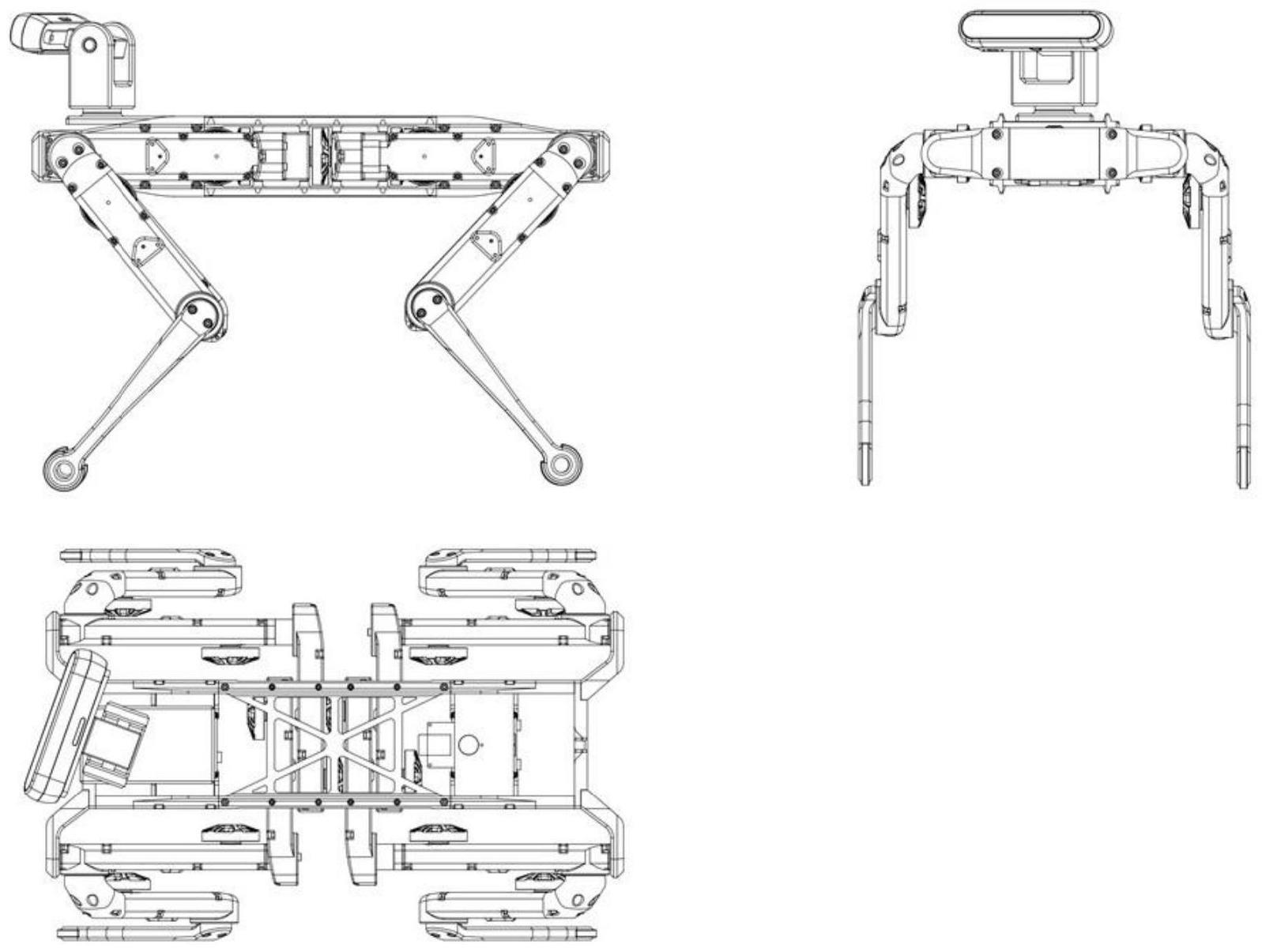
1、本发明旨在解决足式机器人在探索多层复杂室内环境时频繁往返不同楼层而导致效率低下的问题。为了克服这一挑战,我们借鉴了仿生学原理,引入了多维度可转动机构,将足式机器人的姿态与传感器朝向解耦,这使得机器人能够在连续不断地执行路径规划的同时,传感器始终能够保持理想的观测角度。此举的目标是在保持探索持续性的同时,最大程度地优化信息收集的效果。
2、为了更好地指导探索,我们在占据栅格地图中引入了语义信息,并将其融入信息增益计算中。这样做的好处是,每个位置的信息增益能够更准确地反映出环境的实际价值,从而在规划探索路径时提供了更有力的依据。通过结合语义信息,我们能够使机器人更有针对性地选择路径,以获取更富含信息的区域,进而提高自主探索的效率。
3、为了解决频繁楼层切换所带来的效率问题,我们引入了分层路标点的概念。通过对探索路径的规划,机器人可以更加集中地在当前楼层内进行信息获取,从而减少了不必要的楼层切换,提升了整体的探索效率。
4、此外,我们还设计了边界引力作用距离函数和边界引力计算函数,以帮助规划机器人行驶路径上各个点的转动机构朝向。这种设计能够有效地协助机器人保持深度相机的朝向,确保其始终朝向信息获取的关键区域,从而进一步增强了自主探索的效率。
5、综上所述,本发明的核心在于通过多维度可转动机构、语义信息的综合应用、分层路标点的合理设置以及边界引力作用函数的精确规划,旨在提升足式机器人在多层复杂室内环境中的自主探索效率。通过这些创新性的思路和技术手段,我们旨在使机器人能够更加智能、高效地完成探索任务,充分利用丰富的环境信息,从而取得更优异的探索结果。
6、为实现上述目的,本发明提出了适用于复杂楼宇室内环境的足式机器人智能自主探索方法及装置,包括:
7、步骤s1环境建立与感知:利用多维度可转动机构搭载的深度相机获取环境深度图,同时记录深度相机相对于足式机器人底盘的转角和里程计信息,用于建立环境的占据栅格地图。;
8、步骤s2语义信息获取:利用多维度可转动机构搭载的可见光相机,运用基于神经网络的目标检测算法检测当前视野是否包含兴趣目标和地图分层路标。若存在兴趣目标,则在占据栅格地图中标记;
9、步骤s3边界更新:基于已经建立的占据栅格地图进行边界更新,更新的对象只针对当前传感器视野中的边界;
10、步骤s4视点与观测角度计算:针对被更新的边界,进行视点的采集,并且为每个视点计算最佳观测角度。结合语义信息评估每个视点的信息增益,以得到每个边界的最优视点和最佳观测角度;
11、步骤s5分层规划:如果当前环境中有未经过的分层路标点,则进行分层规划,确定后续全局覆盖路径规划所在的高度层;
12、步骤s6连接成本矩阵更新:更新各个边界最优视点之间以及各个边界的最优视点到机器人当前位置的连接成本矩阵;
13、步骤s7全局覆盖路径规划:利用旅行商问题的求解方法,求解当前高度层覆盖机器人当前位置一定范围所有最优视点的全局覆盖路径,已知范围内有地图分层路标点,则将其直接设置为旅行商问题的仓库,以求解得到含返回路径的最优全局覆盖路径;
14、步骤s8动力学可行路径规划:求解连接机器人当前位置与全局覆盖路径中前n个最优视点的动力学可行路径,并且进行轨迹优化;
15、步骤s9可转动机构朝向规划:根据边界的大小以及包含语义信息数量建立吸引力函数,规划动力学可行路径上各个位置的可转动机构朝向;
16、步骤s10路径执行:底盘执行规划的动力学可行平滑轨迹,可转动机构根据底盘所处的未知调整可转动机构的朝向,获得最大的信息增益;
17、步骤s11探索与移动策略:在运动过程中会持续进行s1,当目标边界被探索完毕或规划的路径与新建立的环境发生碰撞的时候,由s10跳转到s1;当目前所在层的环境已经探索完毕,机器人会回到分层路标点,到达下一层,然后跳转到s1,继续进行环境探索。当环境中没有边界的时候,完成探索;
18、所述的多维度可转动机构搭载深度相机和可见光相机,用以提供表征当前视角下环境的深度图和可见光图像。该多维度可转动机构装备了无刷电机,用以改变相机的朝向和俯仰角。该转动机构转轴中装备了电位计,用以测量深度相机与机器人底盘之间的相对转角。
19、利用可见光相机提供的可见光图像,使用基于神经网络的目标检测算法在当前视野检测是否包括门、窗等可以提高信息增益的兴趣目标以及楼梯等地图分层路标,如果有兴趣目标则将其在占据栅格地图内进行标记
20、针对当前传感器视野范围内的区域进行边界更新的方法,具体是指检测各个边界的包围框是否与当前视野范围有交叉,如果有交叉,则对该边界进行更新。
21、所述的分层规划方法具体为:如果分层路标点被检测到,机器人将为每个路标点确定其所在的具体高度层。这个高度层可以与楼层直接关联,使得每个分层路标点代表一个特定楼层。通过将不同楼层的路标点与相应的高度关联起来,机器人能够建立起一个粗略的楼层地图,其中每个分层路标点充当了连接不同楼层的关键连接点。在探索完本层之前,不进行楼层的切换。
22、所述成本矩阵的求解方法为:使用a*路径搜索算法,在空闲的已知环境中,搜索各个最优视点之间以及连接各个最优视点与当前机器人位置的可行路径,将该可行路径的长度设置为成本矩阵的元素。
23、所述全局覆盖路径求解方式具体为:如果当前层无地图分层路标,则设置一个虚拟仓库,将虚拟仓库与机器人之间的连接成本设置为0,结合成本矩阵,将全局覆盖路径求解问题抽象为旅行商问题进行求解;如果当前层有一个地图分层路标,则将其设置为旅行商问题中的仓库,结合成本矩阵,将全局覆盖路径求解问题抽象为旅行商问题进行求解,得到一个有返回路径的全局覆盖路径。
24、所述的动力学可行轨迹的求解方式具体为:在全局覆盖路径的引导下,使用混合a*算法求解动力学可行的平滑路径,然后将该路径参数化为b样条曲线,设置损失函数,使用梯度下降算法进行轨迹优化,得到的平滑轨迹。
25、所述的边界吸引力作用距离函数,其具体定义为d=k1ni+k2yi,其中d是吸引力的作用距离,k1和k2是参数,ni是第i个边界的栅格数量,yi是边界包含的语义信息的数量。其具体作用是根据边界的大小以及其包含的语义信息数量,计算其可能作用的距离,在该距离范围内,可转动机构会控制深度相机的转向,使其朝向始终面对目标边界的质心。
26、所述的边界吸引力函数,其具体定义为,其中f是计算的吸引力,k3和k4是参数,ni是第i个边界的栅格数量,yi是边界包含的语义信息的数量,r是轨迹上一点的位置与边界质心的距离。其具体作用是,如果前后两个边界的作用区域有交集,在该交叉范围内,使用该函数计算两个边界的引力,两个引力的方向均为从当前位置指向各自质心,然后使用平行四边形法则对两个引力进行合并,其方向即为该点多维度可转动机构深度相机的朝向。
27、所述的边界的质心是指该边界的最优视点上,沿着最佳视角方向与边界栅格的交点。质心位置结合吸引力作用距离函数和吸引力计算函数,可以保证地面机器人在行驶到该边界的最优视点时,深度相机的朝向恰好为该视点最佳视角。
28、适用于复杂楼宇室内环境的足式机器人智能自主探索系统,使用上述任何一种所述的适用于复杂楼宇室内环境的足式机器人智能自主探索方法及装置,包括如下模块:
29、多维度可转动机构硬件模块:使用无刷电机控制深度相机与可见光相机的转动,以朝向规划好的方向,使用电位器记录转动机构相对于底盘的转角;
30、足式机器人底盘硬件模块:是整个系统的移动平台,具备上楼梯等强大的越障能力;
31、占据栅格地图建立软件模块:根据里程计信息、深度图以及多维度可转动机构硬件模块所述的相对转角,建立表征整个环境的占据栅格地图;
32、图像语义信息识别软件模块:利用可见光相机的图像,进行目标检测,获取环境的兴趣目标与分层路标点,并且将其标记于占据栅格地图中;
33、边界更新与视点采集软件模块:在占据栅格地图建立软件模块所述的占据栅格地图的基础上,进行边界的更新,并且为每个边界选择最优视点,当本层没有边界时,机器人会通过分层路标点转换到下一层,当环境中没有边界的时候,表示探索任务已完成;
34、立体空间分层规划软件模块:进行空间分层规划,确定当前全局覆盖路径的规划层,以及是否通过分层路标点进行层间的移动;
35、全局覆盖路径求解软件模块:根据边界更新与视点采集软件模块所述的最优视点以及占据栅格地图建立软件模块所述的占据栅格地图,本模块通过求解旅行商问题,得到机器人的带返回路径的全局覆盖路径;
36、动力学可行路径求解软件模块:根据全局覆盖路径求解模块所述的全局覆盖路径和占据栅格地图建立软件模块所述的占据栅格地图,本模块通过混合a*结合梯度优化,得到串联各个最优视点的平滑的动力学可行轨迹;
37、可转动机构控制量求解软件模块:根据边界更新与视点采集软件模块所述的边界信息,根据边界吸引力作用距离函数和边界引力计算函数,规划动力学可行路径求解模块所述动力学可行轨迹上各个点的可转动机构朝向,以完成高效的未知环境探索。
38、现有技术相比,本发明的有益效果是:
39、其一,本发明受猫狗等动物的启发,提出了一种多维度可旋转机构搭载深度相机,用于机器人的自主探索过程。该机构可以将深度相机的朝向和机器人自身姿态解偶,从而使探索过程中相机的朝向不受机器人自身姿态限制,从而提供更加优质的探索视角,并且不影响底盘的连续平稳运动,避免了机器人停止后通过改变自身机体朝向满足探索视角,提高了足式机器人局部探索的探索效率。
40、其二,本发明引入了三维边界的吸引力作用函数,用于规划机器人动力学可行路径上多维度可旋转机构的朝向。这优化了深度相机在路径上的视角,始终朝向信息增益最大的方向。这种方法有效提高了足式机器人局部探索的效率,同时减少了无效探索。
41、其三:本发明创新性地使用环境的可见光图像来识别语义信息,并计算相应的信息增益,为全局覆盖路径规划提供参考。通过识别关键空间沟通渠道(如楼梯),将其作为旅行商问题的仓库,得到考虑返回路径的最优全局覆盖路径。这使得足式机器人在探索完毕后能快速返回关键区域,然后继续下一空间的探索,从而提高了全局探索效率。
42、其四:本发明提出了一种立体空间分层的探索机制,有效减少了机器人频繁在不同楼层之间切换的现象。通过确定每个分层路标点的高度层,将其作为连接点,帮助机器人规划跨楼层的探索路径。这样的设计大幅提高了足式机器人在多层楼宇环境中的全局探索效率,减少了不必要的楼层切换。
- 还没有人留言评论。精彩留言会获得点赞!