一种智能AGV小车装卸货的运行控制方法及控制系统与流程
本发明涉及智能agv小车,尤其涉及一种智能agv小车装卸货的运行控制方法及控制系统。
背景技术:
1、加强行业信息化建设,努力提升安全管理信息化水平,研发重大危险源和关键危险工序的自动识别、提示和自动报警技术,推动行业信息化的系统集成、创新应用和与外部信息的衔接,推动企业内部信息系统之间、与下游行业信息系统之间的信息共享,实现安全生产的信息化管理水平。
2、目前工业炸药产品的装卸以及仓库出入库的管理还是采用传统的人工装卸车以及手工账本管理模式,操作人员较多,劳动强度大,效率低,并且容易出现差错。为促进民爆行业的智能化、少人化甚至无人化技术进步,通过信息化的管理实现安全发展、清洁发展、节约发展,经过多次调研,认为很有必要开发智能化自动化仓储系统,减少危险岗位的在线人员,降低劳动强度,减少出入库的差错率,提高炸药产品出入库工作效率。目前,现有的智能化仓储系统主要依据智能agv小车对货物进行装卸,但,现有的智能agv小车在运货时还存在运行轨迹确定方法复杂、运行轨迹确定后无法排除障碍物对小车运行造成的干扰。可见,现有的智能agv小车工作时存在运行路线确定方法复杂、容易收到障碍物干扰的问题。
技术实现思路
1、本发明提供了一种智能agv小车装卸货的运行控制方法及控制系统,以解决现有的智能agv小车工作时存在运行路线确定方法复杂、容易收到障碍物干扰的问题。
2、为了实现上述目的,本发明通过如下的技术方案来实现:
3、第一方面,本发明提供一种智能agv小车装卸货的运行控制方法,包括:
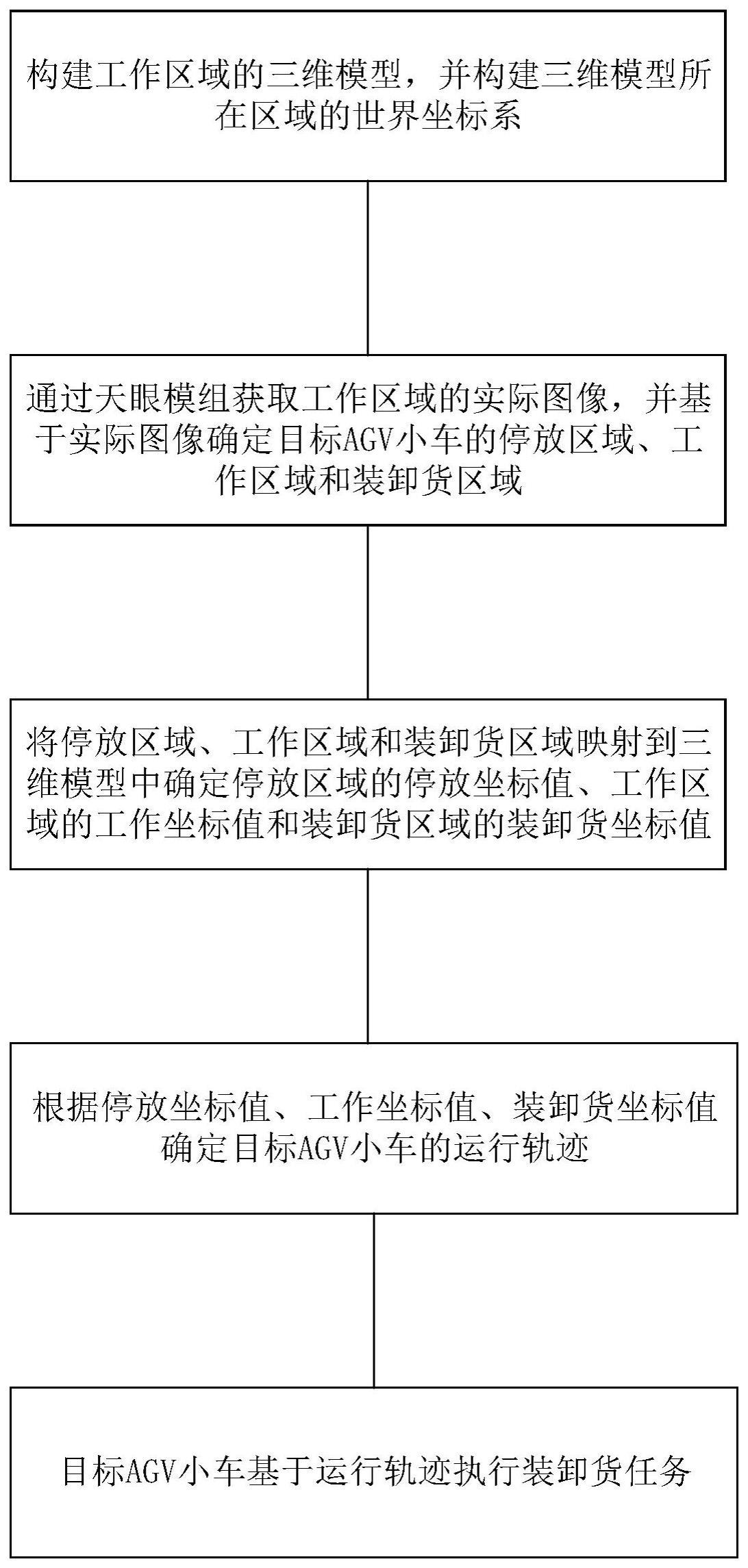
4、构建工作区域的三维模型,并构建所述三维模型所在区域的世界坐标系;
5、通过天眼模组获取工作区域的实际图像,并基于所述实际图像确定目标agv小车的停放区域、工作区域和装卸货区域;
6、将所述停放区域、所述工作区域和所述装卸货区域映射到所述三维模型中确定所述停放区域的停放坐标值、所述工作区域的工作坐标值和所述装卸货区域的装卸货坐标值;
7、根据所述停放坐标值、所述工作坐标值、所述装卸货坐标值确定目标agv小车的运行轨迹;
8、目标agv小车基于所述运行轨迹执行装卸货任务。
9、可选的,所述天眼模组为至少包含一个摄像头的摄影模组。
10、可选的,所述基于所述实际图像确定目标agv小车的停放区域、工作区域和装卸货区域,包括:
11、在所述实际图像中标定agv小车的停放位置,并将该停放位置作为目标agv小车的停放区域;
12、在所述实际图像中标定货物的仓储位置,并将该仓储位置作为目标agv小车的工作区域;
13、在所述实际图像中标定货车车厢的停靠位置,并将该停靠位置作为目标agv小车的装卸货区域。
14、可选的,所述工作坐标值的确定,包括:
15、通过天眼模组获取工作区域的待标定图像,并基于所述待标定图像对工作区域中的货物排数信息、货物储位id号、货物类型、批次号进行标定,得到对应的标定信息;
16、将标定信息映射到三维模型中,基于世界坐标系和标定信息确定货物的坐标值;
17、将货物的坐标值作为工作坐标值。
18、可选的,所述装卸货坐标值的确定,包括:
19、通过天眼模组获取货车车厢的姿态图像,并基于所述姿态图像确定货车车厢的姿态信息、高度信息、车厢中轴线坐标信息;
20、基于所述姿态信息、所述高度信息、所述车厢中轴线坐标信息确定装卸货坐标值。
21、可选的,所述根据所述停放坐标值、所述工作坐标值、所述装卸货坐标值确定目标agv小车的运行轨迹,包括:
22、基于所述停放坐标值和所述工作坐标值确定目标agv小车从停放区域到工作区域的第一行进轨迹;
23、基于所述工作坐标值和所述装卸货坐标值确定目标agv小车从工作区域到装卸货区域的第二行进轨迹;
24、将第一行进轨迹和第二行进轨迹进行拼接得到总行进轨迹,并将总行进轨迹作为运行轨迹。
25、可选的,所述运行轨迹的确定还包括:
26、通过天眼模组实时获取agv小车的工作图像,对所述工作图像与所述三维模型进行比对,将在所述工作图像中存在而在所述三维模型中不存在的物体视为障碍物;
27、将障碍物的位置映射到所述三维模型中确定障碍物在世界坐标系中的障碍物坐标值;
28、基于世界坐标系确定所述运行轨迹的轨迹坐标值,并将所述障碍物坐标值与所述轨迹坐标值进行比对;
29、在所述障碍物坐标值与所述轨迹坐标值出现重合时,在重合区域重新确定新的运行轨迹,使运行轨迹绕开障碍物。
30、可选的,所述目标agv小车基于所述运行轨迹执行装卸货任务,包括:
31、基于货车车厢的到位情况生成装卸货指令发送至目标agv小车;
32、目标agv小车基于所述装卸货指令沿所述运行轨迹移动到所述工作区域中的货物存放位置进行装货作业,并在装货作业完成后沿所述运行轨迹移动到装卸货区域中对货物进行装卸货作业。
33、可选的,所述装卸货指令包括:需出库装车的货物排数信息、待出库对应的货物储位id号、货物类型信息、批次号以及数量信息。
34、第二方面,本申请实施例提供一种智能agv小车装卸货的运行控制系统,包括处理器、存储器;
35、存储器,用于存放计算机程序;
36、处理器,用于执行存储器上所存放的程序时,实现第一方面中任一所述的方法步骤。
37、有益效果:
38、本发明提供的智能agv小车装卸货的运行控制方法,通过构建工作区域的三维模型,并基于实际图像确定目标agv小车的停放区域、工作区域和装卸货区域,再将停放区域、工作区域和装卸货区域映射到三维模型中确定停放区域的停放坐标值、工作区域的工作坐标值和装卸货区域的装卸货坐标值,从而根据停放坐标值、工作坐标值、装卸货坐标值确定目标agv小车的运行轨迹,目标agv小车便可基于运行轨迹执行装卸货任务,有效的提高了智能agv小车工作时运行路线确定的效率,简化的路线确定方法的步骤,从而提高了智能agv小车的工作效率,可以极大减少该工序作业人员,有效降低炸药生产中重大安全事故的发生。
技术特征:
1.一种智能agv小车装卸货的运行控制方法,其特征在于,包括:
2.根据权利要求1所述的智能agv小车装卸货的运行控制方法,其特征在于,所述天眼模组为至少包含一个摄像头的摄影模组。
3.根据权利要求1所述的智能agv小车装卸货的运行控制方法,其特征在于,所述基于所述实际图像确定目标agv小车的停放区域、工作区域和装卸货区域,包括:
4.根据权利要求1所述的智能agv小车装卸货的运行控制方法,其特征在于,所述工作坐标值的确定,包括:
5.根据权利要求1所述的智能agv小车装卸货的运行控制方法,其特征在于,所述装卸货坐标值的确定,包括:
6.根据权利要求1所述的智能agv小车装卸货的运行控制方法,其特征在于,所述根据所述停放坐标值、所述工作坐标值、所述装卸货坐标值确定目标agv小车的运行轨迹,包括:
7.根据权利要求6所述的智能agv小车装卸货的运行控制方法,其特征在于,所述运行轨迹的确定还包括:
8.根据权利要求1所述的智能agv小车装卸货的运行控制方法,其特征在于,所述目标agv小车基于所述运行轨迹执行装卸货任务,包括:
9.根据权利要求7所述的智能agv小车装卸货的运行控制方法,其特征在于,所述装卸货指令包括:需出库装车的货物排数信息、待出库对应的货物储位id号、货物类型信息、批次号以及数量信息。
10.一种智能agv小车装卸货的运行控制系统,其特征在于,包括处理器、存储器;
技术总结
本发明涉及智能AGV小车技术领域,公开了一种智能AGV小车装卸货的运行控制方法及控制系统,包括:构建工作区域的三维模型,并构建三维模型所在区域的世界坐标系;通过天眼模组获取工作区域的实际图像,并基于实际图像确定目标AGV小车的停放区域、工作区域和装卸货区域;将停放区域、工作区域和装卸货区域映射到三维模型中确定停放区域的停放坐标值、工作区域的工作坐标值和装卸货区域的装卸货坐标值;根据停放坐标值、工作坐标值、装卸货坐标值确定目标AGV小车的运行轨迹;目标AGV小车基于运行轨迹执行装卸货任务;本发明解决了现有的智能AGV小车工作时存在运行路线确定方法复杂、容易收到障碍物干扰的问题。
技术研发人员:廖华春,敬亚
受保护的技术使用者:湖南金能自动化设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!