一种电力线路巡检方法及装置与流程
本技术涉及数据处理,具体涉及一种电力线路巡检方法以及电力线路巡检装置。
背景技术:
1、现在在进行电力线路巡检时,通常采用无人机进行巡检,例如,对于某一条比较长的电力线路,会通过无人机以图像识别的方式去巡检该线路中的路途中的绝缘子是否有损坏,电线是否有弯度过大、偏斜等情况出现。
2、但是,现有技术的无人机电力巡检存在着无人机电池续航短的问题,电力线路往往又非常长,且有些电力线路处于山林里,所以没办法每处都安排无人机操控员就近巡检电力线路。
3、现有技术为了解决上述问题,通过设置多个无人机机巢的方式来进行续航,但是,现有的无人机满电续航里程不超过7公里,还需要预留一半的电力返回机巢,而电电力线路往往非常长。这就导致了需要布置大量的机巢和无人机。这种现有技术存在问题在于电力巡检线路无人机价格昂贵,如果在每条输电线路全部设置无人机和相应的机巢,基础建设成本会非常巨大。
4、另外,现有技术也没有办法根据无人机机巢的位置以及巡检当天的天气情况来选择适合的无人机机巢的方案,因为在不同的天气情况下,可能适合于不同的机巢出发,举例来说,当没有风或者风速较小的情况下,理论上选择最靠近待巡检线路的两个端点的机巢最为合适,但是如果风速比较大的情况下,还要考虑最靠近待巡检线路的机巢在整个飞行过程中是否逆风,如果是整个飞行过程都逆风的情况,可能反而并非最优机巢。
技术实现思路
1、本发明的目的在于提供一种电力线路巡检方法来至少解决上述的一个技术问题。
2、本发明的一个方面,提供一种电力线路巡检方法,所述电力线路巡检方法包括:
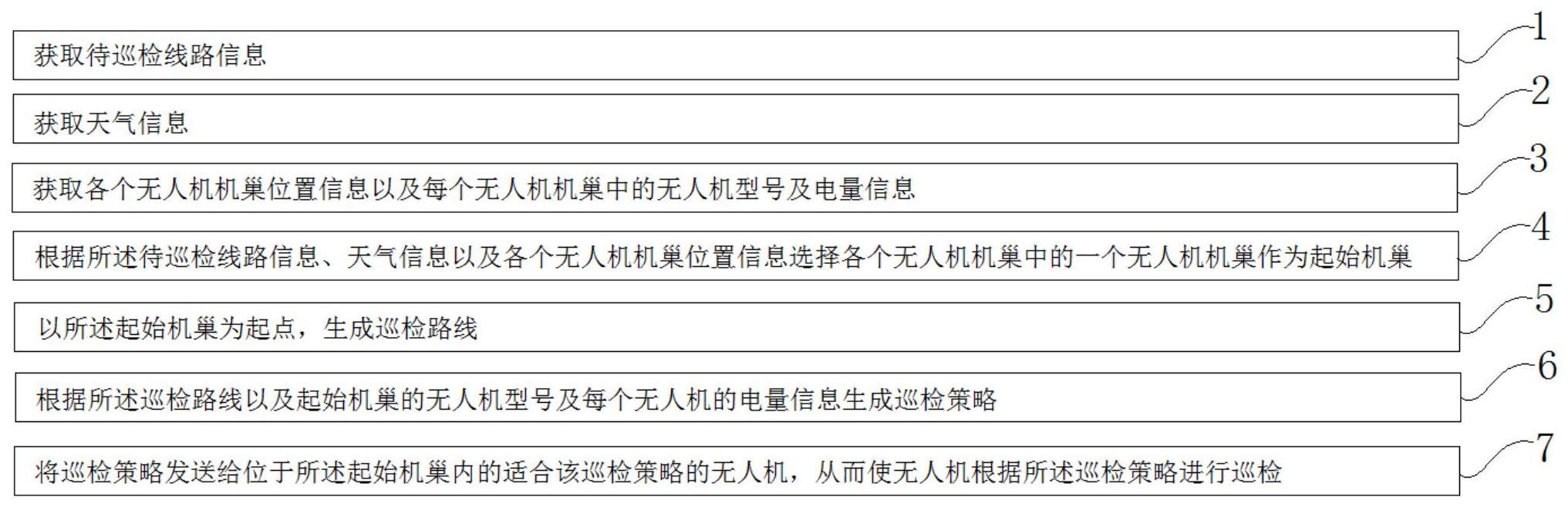
3、获取待巡检线路信息;
4、获取天气信息;
5、获取各个无人机机巢位置信息以及每个无人机机巢中的无人机型号及电量信息;
6、根据所述待巡检线路信息、天气信息以及各个无人机机巢位置信息选择各个无人机机巢中的一个无人机机巢作为起始机巢;
7、以所述起始机巢为起点,生成巡检路线;
8、根据所述巡检路线以及起始机巢的无人机型号及每个无人机的电量信息生成巡检策略;
9、将巡检策略发送给位于所述起始机巢内的适合该巡检策略的无人机,从而使无人机根据所述巡检策略进行巡检。
10、可选地,所述待巡检线路信息包括巡检必经点坐标信息;
11、所述天气信息包括巡检必经点坐标信息的巡检区域风速信息、每个巡检必经点坐标信息的风向信息以及每个巡检必经点坐标信息的巡检区域降雨量信息;
12、所述根据所述待巡检线路信息、天气信息以及各个无人机机巢位置信息选择各个无人机机巢中的一个无人机机巢作为起始机巢包括:
13、根据所述无人机机巢位置信息以及所述巡检必经点坐标信息获取每个无人机机巢距离其所最近的巡检必经点坐标信息的距离信息;
14、获取距离信息小于预设第一距离阈值的无人机机巢;
15、当所述距离小于预设距离阈值的无人机机巢的数量超过两个时,分别为每个无人机机巢进行如下操作:
16、获取无人机机巢评分数据库,所述无人机机巢评分数据库包括风向评分数据库、风速评分数据库以及降雨量评分数据库,所述风向评分数据库包括风向三元组,一个风向三元组包括一个预设坐标信息、一个预设风向信息以及一个预设风向分值;所述风速评分数据库包括风速三元组,一个风速三元组包括一个预设坐标信息、一个预设风速区间信息以及一个预设风速分值;所述降雨量评分数据库包括至少一个降雨量三元组,一个降雨量三元组包括一个预设坐标信息、一个预设降雨量区间信息以及一个预设降雨量分值;
17、获取各个风向三元组中与各个巡检必经点坐标信息相同且与该巡检必经点坐标信息当前的风向信息相同的风向三元组,获取的风向三元组称为待评分使用风向三元组;
18、获取各个风速三元组中与各个巡检必经点坐标信息相同且该巡检必经点坐标信息当前的巡检区域风速信息位于该风速三元组中的预设风速区间信息内的风速三元组,获取的风速三元组称为待评分使用风速三元组;
19、获取各个降雨量三元组中与各个巡检必经点坐标信息相同且该巡检必经点坐标信息当前的巡检区域降雨量信息位于该降雨量三元组中的预设降雨量区间信息内的降雨量三元组,获取的降雨量三元组称为待评分使用降雨量三元组;
20、获取每个待评分使用风向三元组中的预设风向分值;
21、获取每个待评分使用风速三元组中的预设风速分值;
22、获取每个待评分使用降雨量三元组中的预设降雨量分值;
23、当任意一个巡检必经点坐标信息的待评分使用风向三元组的预设风向分值为负时,将与其所述具有相同巡检必经点坐标信息的待评分使用风速三元组中的预设风速分值也设置为负数;
24、获取各个预设风向分值、各个预设风速分值以及各个预设降雨量分值之和作为该无人机机巢的环境评分;
25、获取环境评分最高的无人机机巢作为起始机巢。
26、可选地,所述以所述起始机巢为起点,生成巡检路线包括:
27、获取各个巡检必经点坐标信息;
28、以所述起始机巢的位置信息作为起始点,将距离所述起始点最远的巡检必经点坐标信息作为终点,利用rrt算法得到任意两个巡检必经点坐标信息之间的路径离散点,并利用三次b样条方法处理离散点得到局部路径;
29、根据两两巡检必经点坐标信息之间的路径长度,将无人机的全局路径规划转化为旅行商问题并利用改进的鲸鱼算法求解该模型得到经过所有巡检必经点坐标信息的巡检路线。
30、可选地,所述根据所述巡检路线以及起始机巢的无人机型号及每个无人机的电量信息生成巡检策略包括:
31、为每个起始机巢中的无人机进行如下操作:
32、根据所述无人机型号获取最大飞行速度信息;
33、获取经过训练的transformer模型;
34、提取所述最大飞行速度信息的最大飞行速度特征;
35、将所述风速特征、所述雨水特征以及所述最大飞行速度特征信息输入至所述经过训练的transformer模型,从而获取预估能量消耗率;
36、根据预估能量消耗率以及该无人机的电量信息获取预估飞行时间;
37、根据预估飞行时间以及所述最大飞行速度信息获取该无人机能够飞行的距离;
38、获取巡检路线的总距离;
39、根据所述巡检路线的总距离减去所述无人机能够飞行的距离,从而获取剩余飞行距离;
40、获取距离所述终点最近的无人机机巢与所述终点之间的直线距离;
41、判断所述剩余飞行距离与所述直线距离之差是否大于预设第二距离阈值,若是,则
42、选取该无人机作为备选巡检无人机;
43、获取各个备选巡检无人机的剩余飞行距离与所述直线距离,选取差值最大的一个备选巡检无人机,并以该备选巡检无人机全程完成所述巡检路线并飞行至距离所述终点最近的无人机机巢为巡检策略。
44、可选地,所述电力线路巡检方法进一步包括:
45、在所述适合该巡检策略的无人机进行巡检飞行过程中,当所述无人机的电量低于总电量60%时,每隔预设时间获取一次无人机所传递的电量信息以及无人机的位置信息。
46、可选地,所述电力线路巡检方法进一步包括:
47、在所述无人机的电量低于总电量50%时,获取所述无人机的飞行速度信息;
48、获取无人机的电量低于总电量50%时剩余路程的各个预设坐标信息所对应的巡检区域风速信息以及各个预设坐标信息所对应的降雨量信息;
49、提取所述无人机的电量低于总电量50%时剩余路程的各个预设坐标信息所对应的巡检区域风速信息的风速特征;
50、提取所述无人机的电量低于总电量50%时剩余路程的各个预设坐标信息所对应的降雨量信息的雨水特征;
51、提取所述无人机的飞行速度信息的当前飞行速度特征;
52、将所述无人机的电量低于总电量50%时剩余路程的各个预设坐标信息所对应的巡检区域风速信息的风速特征、无人机的电量低于总电量50%时剩余路程的各个预设坐标信息所对应的降雨量信息的雨水特征以及当前飞行速度特征输入至所述经过训练的transformer模型,从而获取预估能量消耗率;
53、根据获取的预估能量消耗率获取所述无人机剩余飞行距离;
54、根据所述无人机剩余飞行距离判断无人机是否能够完成本次巡检,若否,则
55、根据未巡检路程、各个无人机机巢位置信息以及每个无人机机巢中的无人机型号及电量信息生成辅助巡检策略;其中,所述辅助巡检策略包括原无人机行驶策略以及辅助无人机及无人车组巡检策略;
56、将所述原无人机行驶策略发送给正在巡检的无人机,从而使正在巡检的无人机按照所述原无人机行驶策略进行工作;
57、将所述辅助无人机及无人车组巡检策略发送给适合该辅助无人机及无人车组巡检策略的无人机机巢中的对应的无人机以及无人车,从而使适合该辅助无人机及无人车组巡检策略的无人机机巢中的对应的无人机以及无人车根据所述辅助无人机及无人车组巡检策略进行工作。
58、可选地,所述根据未巡检路程、各个无人机机巢位置信息以及每个无人机机巢中的无人机型号及电量信息生成辅助巡检策略包括:
59、为每个无人机机巢进行如下操作:
60、获取未巡检路程中的各个巡检必经点坐标信息;
61、生成所述无人机机巢至每个巡检必经点坐标信息的无人车路线信息;
62、获取无人车的最大行驶速度以及各个无人车路线信息,从而为每个无人机机巢选取一个用时最短路线信息、以及该用时最短路线信息的用时信息以及该用时最短路线信息所对应的巡检必经点坐标信息;
63、分别获取正在进行巡检的无人机到每个用时最短路线信息所对应的巡检必经点坐标信息的预估时间;
64、获取该预估时间与每个用时最短路线信息的用时信息之间的差值;
65、获取差值最小的用时最短路线信息所对应的巡检必经点坐标信息,该巡检必经点坐标信息作为中途经停点;
66、获取正在进行巡检的无人机到中途经停点时的预估剩余电量信息;
67、若所述预估剩余电量信息超过预设剩余电量阈值,则
68、生成原无人机行驶策略,其中,所述原无人机行驶策略包括:使正在进行巡检的无人机行驶至该中途经停点;
69、生成辅助无人机及无人车组巡检策略,其中,所述辅助无人机及无人车组巡检策略包括:使能够最快至所述中途经停点的无人机机巢中的无人车携带无人机至该中途经停点,并以该中途经停点为起点,为所述无人车携带的无人机生成辅助巡检路线以及以所述终点为起点,以距离所述终点最近的无人机机巢为终点生成返程路线。
70、可选地,所述电力线路巡检方法进一步包括:
71、当正在进行巡检的无人机行驶至该中途经停点且所述无人车行驶至该中途经停点时,所述正在进行巡检的无人机降落至所述无人车。
72、本技术还提供了一种电力线路巡检装置,所述电力线路巡检装置包括:
73、待巡检线路信息获取模块,所述待巡检线路信息获取模块用于获取待巡检线路信息;
74、天气信息获取模块,所述天气信息获取模块用于获取天气信息;
75、无人机机巢信息获取模块,所述无人机机巢信息获取模块用于获取各个无人机机巢位置信息以及每个无人机机巢中的无人机型号及电量信息;
76、起始机巢确定模块,所述起始机巢确定模块用于根据所述待巡检线路信息、天气信息以及各个无人机机巢位置信息选择各个无人机机巢中的一个无人机机巢作为起始机巢;
77、巡检路线生成模块,所述巡检路线生成模块用于以所述起始机巢为起点,生成巡检路线;
78、巡检策略生成模块,所述巡检策略生成模块用于根据所述巡检路线以及起始机巢的无人机型号及每个无人机的电量信息生成巡检策略;
79、巡检策略发送模块,所述巡检策略发送模块用于将巡检策略发送给位于所述起始机巢内的适合该巡检策略的无人机,从而使无人机根据所述巡检策略进行巡检。
80、有益效果
81、本技术的电力线路巡检方法充分考虑待巡检线路信息、天气信息、无人机机巢位置信息,根据三者选择最为合适位置的无人机进行巡检,从而解决了现有技术只根据位置来确定巡检出发点以及巡检路线的问题。
- 还没有人留言评论。精彩留言会获得点赞!