自动驾驶干扰要素的生成方法及装置与流程
本发明涉及自动驾驶,具体而言,涉及一种自动驾驶干扰要素的生成方法及装置。
背景技术:
1、相关技术中,自动驾驶车辆拥有近距离的感知能力,可以实时识别探测周边的动态物体,以及地面标线、护栏等静态障碍、地面标识(斑马线、地面箭头)等等。而依赖当前已有的高精度地图,自动驾驶车辆可获取超视距的感知能力,提前感知地图制作的地面标线、地面标识等静态要素。
2、但是上述两类感知能力,给自动驾驶规控提供的信息存在以下局限:①实时感知可感知动态要素和静态要素,但是只能感知当前接收的信息,采集范围和采集时间有限,无法提前做出判断。②高精地图只能提供静态要素,无法提供动态要素信息。在自动驾驶从封闭道路到开放道路发展的当今,上述技术难以保障自动驾驶车辆在行人、骑行者和自动驾驶车辆混行的普通路上安全驾驶。
3、针对相关技术中存在的上述问题,暂未发现高效且准确的解决方案。
技术实现思路
1、本发明提供了一种自动驾驶干扰要素的生成方法及装置,以解决相关技术中存在的上述技术问题。
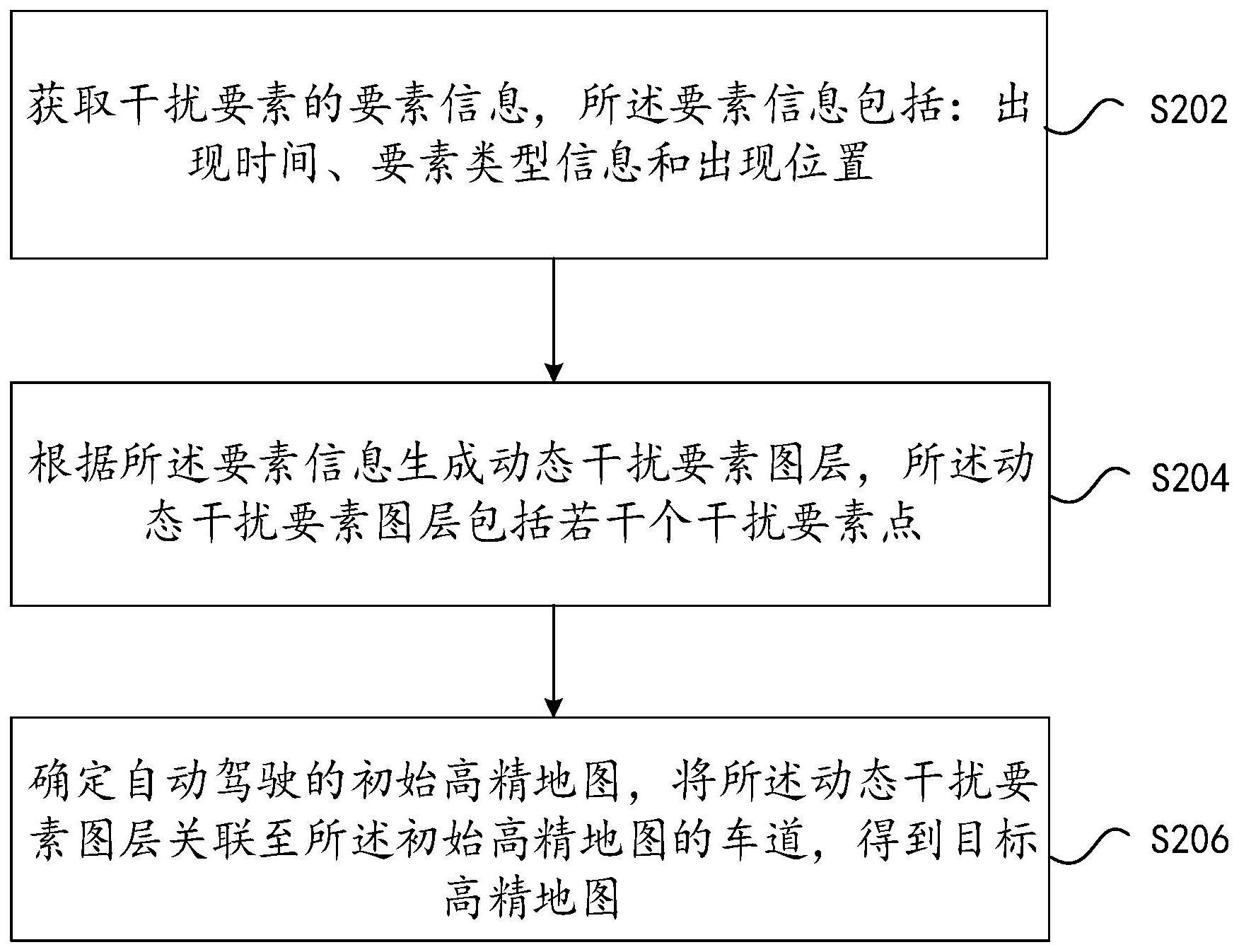
2、根据本发明的一个实施例,提供了一种自动驾驶干扰要素的生成方法,其特征在于,包括:获取干扰要素的要素信息,所述要素信息包括:出现时间、要素类型信息和出现位置;根据所述要素信息生成动态干扰要素图层,所述动态干扰要素图层包括若干个干扰要素点;确定自动驾驶的初始高精地图,将所述动态干扰要素图层关联至所述初始高精地图的车道,得到目标高精地图。
3、可选地,根据所述要素信息生成动态干扰要素图层包括:统计所述要素信息中的出现位置的数量,并将每个出现位置配置为一个干扰要素点,生成所述要素点的点几何图;针对所述点几何图中的每个干扰要素点,基于所述干扰要素点的出现时间分类得到所述干扰要素点的时间段信息;针对所述点几何图中的每个干扰要素点,根据所述要素类型信息对所述干扰要素点进行类型赋值,得到动态干扰要素图层,其中,所述类型包括行人、骑行者。
4、可选地,基于所述干扰要素点的出现时间分类得到所述干扰要素点的时间段信息包括:在预设时间段集合中查找与所述干扰要素点的出现时间匹配的目标时间段,其中,所述预设时间段集合包括多个相同时长的时间段;将所述目标时间段确定为所述干扰要素点的时间段信息。
5、可选地,将所述动态干扰要素图层关联至所述初始高精地图的车道,得到目标高精地图包括:将所述动态干扰要素图层与所述初始高精地图进行几何匹配,确定车道内的第一干扰要素点和车道外的第二干扰要素点;在所述初始高精地图中,将所述第一干扰要素点匹配到对应车道的车道中心线上,并删除所述第二干扰要素点,得到目标高精地图。
6、可选地,在将所述动态干扰要素图层关联至所述初始高精地图的车道,得到目标高精地图之后,所述方法还包括:确定所述目标高精地图上的导航轨迹;计算所述导航轨迹在当前时间的行驶车道和预测车道上的干扰要素点数量;根据所述干扰要素点数量计算自动驾驶的干扰等级;基于所述干扰等级控制车辆的自动驾驶策略。
7、可选地,根据所述干扰要素点数量计算自动驾驶的干扰等级包括:统计干扰要素点数量;判断所述干扰要素点数量是否大于第一阈值;若所述要素点的数量大于第一阈值,生成第一干扰等级;若所述要素点的数量小于等于所述第一阈值,判断所述干扰要素点数量是否大于第二阈值,其中,所述第二阈值小于所述第一阈值;若所述要素点的数量大于所述第二阈值,生成第二干扰等级,若所述要素点的数量小于等于所述第二阈值,生成第三干扰等级。
8、可选地,基于所述干扰等级控制车辆的自动驾驶策略包括:若所述干扰等级为第一干扰等级,输出第一提示信息,其中,所述第一提示信息用于建议车辆退出自动驾驶模式;若干扰等级为第二干扰等级,输出第二提示信息,其中,所述第二提示信息用于提示车辆优先选择手动驾驶模式;若干扰等级为第三干扰等级,输出第三提示信息,其中,所述第三提示信息用于推荐车辆使用自动驾驶模式。
9、根据本发明的另一个实施例,提供了一种自动驾驶干扰要素的生成装置,包括:获取模块,用于获取干扰要素的要素信息,所述要素信息包括:出现时间、要素类型信息和出现位置;生成模块,用于根据所述要素信息生成动态干扰要素图层,所述动态干扰要素图层包括若干个干扰要素点;关联模块,用于确定自动驾驶的初始高精地图,将所述动态干扰要素图层关联至所述初始高精地图的车道,得到目标高精地图。
10、可选地,所述生成模块包括:生成单元,用于统计所述要素信息中的出现位置的数量,并将每个出现位置配置为一个干扰要素点,生成所述要素点的点几何图;分类单元,用于针对所述点几何图中的每个干扰要素点,基于所述干扰要素点的出现时间分类得到所述干扰要素点的时间段信息;赋值单元,用于针对所述点几何图中的每个干扰要素点,根据所述要素类型信息对所述干扰要素点进行类型赋值,得到动态干扰要素图层,其中,所述类型包括行人、骑行者。
11、可选地,所述分类单元包括,匹配子单元,用于在预设时间段集合中查找与所述干扰要素点的出现时间匹配的目标时间段,其中,所述预设时间段集合包括多个相同时长的时间段;确定子单元,用于将所述目标时间段确定为所述干扰要素点的时间段信息。
12、可选地,所述关联模块包括:第一匹配单元,用于将所述动态干扰要素图层与所述初始高精地图进行几何匹配,确定车道内的第一干扰要素点和车道外的第二干扰要素点;第二匹配单元,用于在所述初始高精地图中,将所述第一干扰要素点匹配到对应车道的车道中心线上,并删除所述第二干扰要素点,得到目标高精地图。
13、可选地,所述装置还包括:确定模块,用于确定所述目标高精地图上的导航轨迹;统计模块,用于计算所述导航轨迹在当前时间的行驶车道和预测车道上的干扰要素点数量;计算模块,用于根据所述干扰要素点数量计算自动驾驶的干扰等级;控制模块,用于基于所述干扰等级控制车辆的自动驾驶策略。
14、可选地,所述计算模块包括:统计单元,用于统计干扰要素点数量;第一判断单元,用于判断所述干扰要素点数量是否大于第一阈值;第一生成单元,用于若所述要素点的数量大于第一阈值,生成第一干扰等级;第二判断单元,用于若所述要素点的数量小于等于所述第一阈值,判断所述干扰要素点数量是否大于第二阈值,其中,所述第二阈值小于所述第一阈值;第二生成单元,用于若所述要素点的数量大于所述第二阈值,生成第二干扰等级;第三生成单元,用于若所述要素点的数量小于等于所述第二阈值,生成第三干扰等级。
15、可选地,所述控制模块包括:第一输出单元,用于若所述干扰等级为第一干扰等级,输出第一提示信息,其中,所述第一提示信息用于建议车辆退出自动驾驶模式;第二输出单元,用于若干扰等级为第二干扰等级,输出第二提示信息,其中,所述第二提示信息用于提示车辆优先选择手动驾驶模式;第三输出单元,用于若干扰等级为第三干扰等级,输出第三提示信息,其中,所述第三提示信息用于推荐车辆使用自动驾驶模式。
16、根据本发明的又一个实施例,还提供了一种存储介质,其特征在于,存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行上述任一项装置实施例中的步骤。
17、根据本发明的又一个实施例,还提供了一种电子装置,包括存储器和处理器,其特征在于,存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述任一项装置实施例中的步骤。
18、通过本发明实施例,获取干扰要素的要素信息,所述要素信息包括:出现时间、要素类型信息和出现位置;根据所述要素信息生成动态干扰要素图层,所述动态干扰要素图层包括若干个干扰要素点;确定自动驾驶的初始高精地图,将所述动态干扰要素图层关联至所述初始高精地图的车道,得到目标高精地图,通过获取干扰要素信息生成动态干扰要素图层,并与高精地图相关联得到目标高精地图,所述目标高精地图记载了自动驾驶动态干扰要素,可供自动驾驶车辆提前获取,用于提前变道、规避,解决了相关技术不能生成包含驾驶干扰信息的高精地图的技术问题,车辆行驶过程中可以应对如行人/骑行者突然横穿马路等突发状况,提高了自动驾驶车辆的安全性,可靠性。
- 还没有人留言评论。精彩留言会获得点赞!