一种智能权重下的近距空战机动决策优化方法
本发明涉及飞行器机动决策,具体而言,涉及一种智能权重下的近距空战机动决策优化方法。
背景技术:
1、飞行器空战关键技术主要包括战术态势评估和机动决策求解,由于空战态势复杂多变,战术评估算法和机动决策算法必须具备多种态势下的鲁棒性。随着机载装备的升级和智能化,战术态势评估的准确性很大程度上影响着后续机动决策求解效果,态势评估与机动决策求解是互相耦合和互相反馈的,机动决策求解的过程中往往需要态势评估模块提供对当前态势的判断,而后根据判断的情况进行符合当前态势的机动决策。因此,提高飞行器的态势评估准确性以及如何利用态势评估实现更优的机动决策求解成为空战智能决策的关键环节。
2、对于态势评估的研究主要集中在通过构建态势评估函数来对当前态势进行优劣势的判断,而由于态势评估函数中包含飞行器相对速度、相对高度和相对距离等多个物理量,各物理量评估值一般通过权重进行加权求和后得出最后的态势评估值,各学者在权重选择方面主要有基于导弹攻击区的方法、基于能力威胁和意图威胁的方法、基于主成分分析法的方法等,上述态势评估方法在不同程度上优化了指标权重,但也存在以下问题:一是无法与空战的高动态性相匹配,权重最优空间较小;二是没有考虑到后续的机动决策求解算法。事实上,态势评估函数中的权重选择不仅与当前态势相关,也与机动决策求解算法相关。
3、在空战机动决策方面研究较多,可大致分为基于对策理论的方法、基于专家系统的方法和基于强化学习的方法。然而,这些方法分别存在下列问题:(1)难以适应复杂的空战作战场景,仅较适用于飞行器追击或逃逸等简单场景;(2)依赖人为经验,且其移植性和适应性较差;(3)难以保证机动决策的安全性且不具备通用性。
技术实现思路
1、本发明在于提供一种智能权重下的近距空战机动决策优化方法,在态势评估中的权重系数变化特性考虑到了机动决策方法的特性,保证了飞行机动决策的可行性和最优性,态势权重系数的选择方法和机动决策方法的移植性和通用性均非常好。
2、本发明采取的技术方案如下:
3、一种智能权重下的近距空战机动决策优化方法,包括以下步骤:
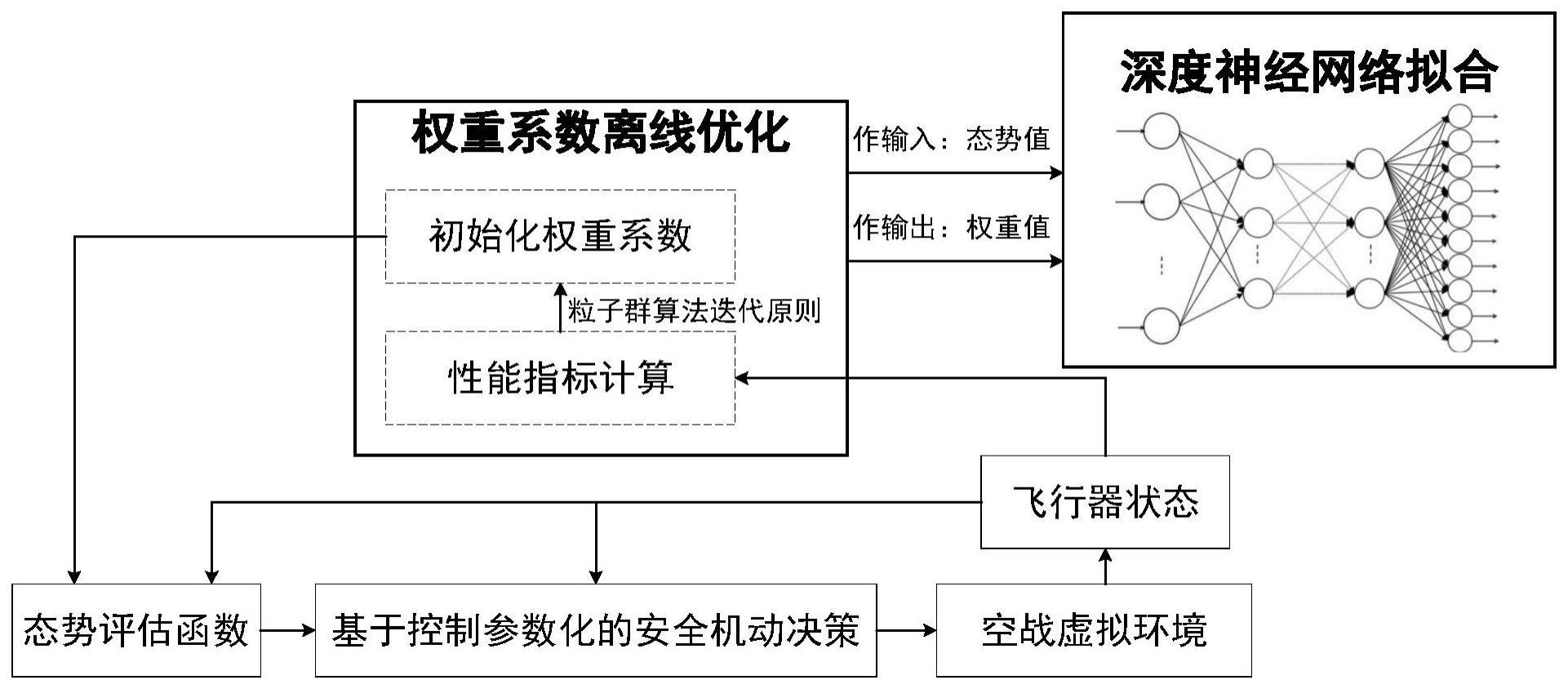
4、s1、根据历史飞行器状态,采用粒子群算法离线优化飞行器空战态势下的态势权重系数;
5、s2、根据历史飞行器状态计算历史飞行器态势值,以历史飞行器态势值作为输入,以离线优化后的飞行器空战态势下的态势权重系数作为输出,训练深度神经网络;
6、s3、根据实时飞行器状态计算实时飞行器态势值,将实时飞行器态势值输入训练好的深度神经网络,输出得到实时空战全态势空间下的权重系数;
7、s4、根据实时空战全态势空间下的权重系数和实时飞行器状态进行近距空战态势评估,得到近距空战态势评估结果;
8、s5、根据近距空战态势评估结果和实时飞行器状态,对基于控制参数化的安全机动决策模型进行求解,得到基于控制参数化的安全机动决策。
9、具体地,步骤s1具体包括以下步骤:
10、s11、设置最大迭代次数k与初始粒子个数n,设置权重系数优化总步长数i,并初始化当前粒子群个体的速度与位置,初始化迭代次数k=1;
11、s12、根据指标计算函数
12、
13、
14、
15、计算当前粒子个体和整体的最佳位置xbest,gbest,其中,i为决策步长,ta,i,td,i为飞行器状态数据,分别代表第i个步长我方飞行器的角度和距离优势值,winr代表在未来决策步长i内我方飞行器是否胜利,若胜利则其为1,战败为-1,无获胜方则为0;
16、s13、判断迭代次数k是否达到最大迭代次数k,若是,则输出最佳位置gbest,即得到优化后的飞行器空战态势下的态势权重系数,优化结束,若为否,则执行步骤s14;
17、s14、根据公式
18、
19、
20、计算更新粒子速度v与位置x,下标j=1,2,...,n为粒子编号,上标k表示迭代次数,n为粒子群总个数,r1,r2∈[0,1]为随机数,w1,w2>0为粒子速度学习因子,其满足c=c1+c2>2,ω为粒子速度惯性常数,其值为:
21、
22、之后令k=k+1,跳转至步骤s12。
23、更具体地,飞行器态势值包括飞行器的角度ta、距离td、速度tv和高度th,且它们的计算公式如下:
24、
25、式中,φ为方位角,q为进入角;
26、
27、式中,σ1,σ2为两个控制距离优势值上升坡度的参数,d为两机距离,d为两机位置矢量的差,[dmin,dmax]为机载武器攻击范围;
28、
29、v*为我方飞行器的最佳攻击速度,计算如下:
30、
31、其中,vb为敌方飞行器的飞行速度,vr为我方飞行器的飞行速度,[vrmin,vrmax]为我方飞行器的飞行速度约束;
32、
33、式中σ3,σ4为两个控制高度优势值上升坡度的参数,[δhmin,δhmax]为最佳相对高度范围,δh0为我机与敌机的相对高度。
34、更具体地,用于计算近距空战态势评估结果r的近距空战态势评估函数为:
35、r=αata+αdtd+αvtv+αhth
36、式中,ta,td,tv,th为根据飞行器状态计算得到的飞行器态势值,αa,αd,αv,αh为各空战全态势空间下的权重系数。
37、更具体地,基于控制参数化的安全机动决策模型的构建方法包括:
38、根据飞行器的纵向过载nx、法向过载n、速度滚转角μ构建第一飞行器质点动力学模型:
39、
40、状态量取为:
41、x(t)=[v,χ,γ,x,y,z]t
42、系统控制输入取为:
43、u(t)=[nx,n,μ]t
44、将第一飞行器质点动力学模型表示为第二飞行器质点动力学模型:
45、
46、x(0)=x0
47、式中,x0为飞行器初始状态;
48、飞行器近距空战最优机动决策问题中的目标函数取对近距空战态势评估函数的积分值,即为:
49、
50、在短周期步长内将第二飞行器质点动力学模型近似为离散系统,将时间段等分离散为m段,即离散步长为:
51、δt=(t0-tf)/m
52、将系统控制输入进行参数离散化近似处理:
53、u(t)=[u(0)t,u(1)t,...,u(m-1)t]t
54、其中,u(0),u(1),...u(m-1)即为待优化的参数集合;
55、对目标函数进行近似处理:
56、
57、将第二飞行器质点动力学模型近似为如下离散差分方程:
58、x(k+1)=x(k)+f(x(k),u(k))δt
59、=f(k,x(k),u(k))
60、k=0,1,...,m-1
61、将状态及控制量约束近似为在每个离散点上的相应约束:
62、nxmin≤nxk≤nxmax
63、nzmin≤nk≤nzmax
64、μmin≤μk≤μmax,k=0,1,...,m-1
65、vmin≤vk≤vmax
66、χmin≤χk≤χmax
67、γmin≤γk≤γmax
68、zmin≤zk,k=0,1,...,m
69、将原始的飞行器近距空战最优机动决策问题通过控制量参数化及动态方程离散化近似,转化得到基于控制参数化的安全机动决策模型:
70、
71、更具体地,采用内点法对基于控制参数化的安全机动决策模型进行求解。
72、与现有技术相比,本发明的有益效果是:
73、(1)本发明在态势评估中的权重系数优化考虑到了机动决策优化算法,能够在其机动决策优化能力的基础上对权重进行优化,通过粒子群智能优化方法对权重系数进行离线优化,优化过程由输入权重-建立评估函数-机动决策优化求解-两机状态更新,这一闭环优化过程实现,不仅能够提高态势评估函数的实时评估能力,而且可以提高机动决策算法的优化效果;
74、(2)对权重系数的离线优化过程所能采集的离线数据有限,为了实现全态势空间下的权重系数映射,本发明采用深度神经网络进行数据拟合学习,训练之后的网络层能够实现空战全态势空间下的权重系数在线输出,供后续机动决策算法使用;
75、(3)本发明的机动决策算法能够与实时态势评估函数相结合,采用控制参数化方法将飞行器空战机动决策最优控制问题处理为有限维可在线求解的非线性规划问题,既能够实现当前态势下使空战态势趋优的机动决策实时求解,又能够保证机动决策的安全性,满足实际机动性能。
76、为使本发明的上述目的、特征和优点能更明显易懂,下文特举本发明实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!