一种无人线控重载AGV纵横向协调控制方法及装置
本发明涉及无人驾驶,尤其涉及一种无人线控重载agv纵横向协调控制方法及装置。
背景技术:
1、近年来,随着电动化、智能化、网联化和共享化大潮汹涌,无人驾驶高歌猛进,国内外不少大型企业已投身无人驾驶及相关研究,但在现阶段,无人乘用车落地运营还有一段路要走,而特种无人场景下线控重载agv因安全、高效等优点得以快速发展与落地,各行业都得以应用,线控重载agv主要运用于特殊场景无人运输系统,其对纵向及横向跟踪精度、平顺性及稳定性有较高要求,对于线控特重载agv而言,运动规划、运动控制是落地运营的基石,对此,提出一种采用无人线控重载agv纵横向协调控制策略来提高多场景和多工况线控重载agv的轨迹跟踪精度、平顺性及稳定性,进一步提升无人运输系统效率与安全性。
技术实现思路
1、本发明的目的在于克服现有技术的不足,本发明提供了一种无人线控重载agv纵横向协调控制方法及装置,通过构建无人线控重载agv纵横向协调控制策略,不仅满足无人线控重载agv高精度地跟随路径行驶,还能够达到能量消耗最低的目的。
2、为了解决上述技术问题,本发明实施例提供了一种无人线控重载agv纵横向协调控制方法,所述方法包括:
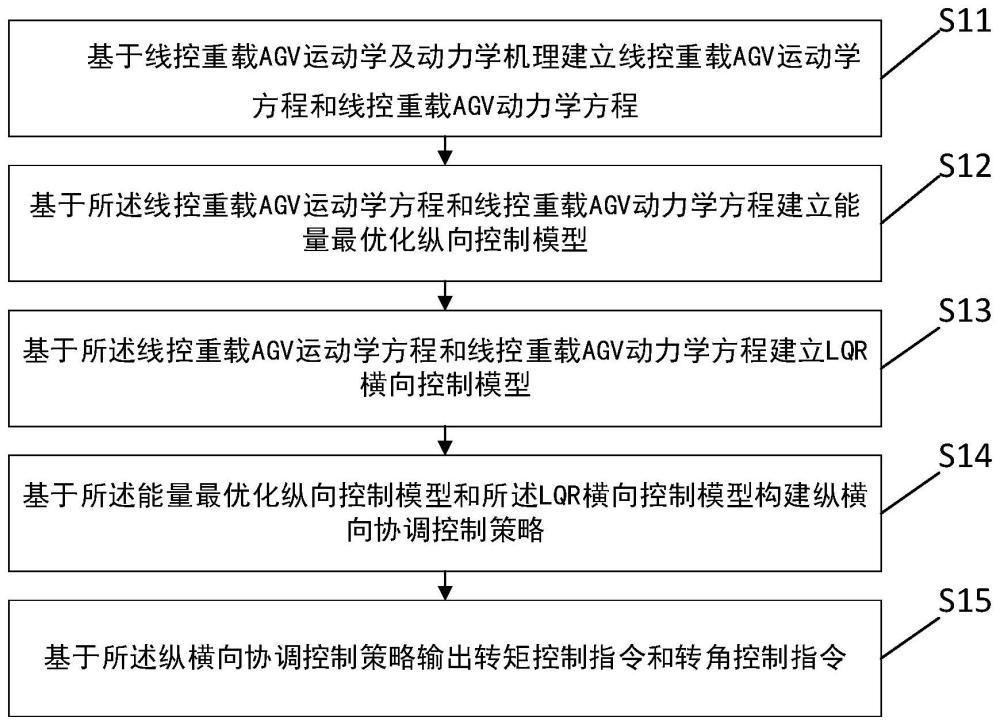
3、基于线控重载agv运动学及动力学机理建立线控重载agv运动学方程和线控重载agv动力学方程;
4、基于所述线控重载agv运动学方程和线控重载agv动力学方程建立能量最优化纵向控制模型;
5、基于所述线控重载agv运动学方程和线控重载agv动力学方程建立lqr横向控制模型;
6、基于所述能量最优化纵向控制模型和所述lqr横向控制模型构建纵横向协调控制策略;
7、基于所述纵横向协调控制策略输出转矩控制指令和转角控制指令。
8、可选的,所述基于线控重载agv运动学及动力学机理建立线控重载agv运动学方程和线控重载agv动力学方程,包括:
9、基于线控重载agv运动学机理利用无人线控重载agv的位置、角度及横摆角速度数据建立线控重载agv运动学方程,其中,所述线控重载agv运动学方程为:
10、
11、其中,为纵向速度,为横向速度,为横摆速度,为横摆角,δr为前轮转角,l为前后轴距,vr为瞬时速度;
12、基于线控重载agv动力学机理建立线控重载agv动力学方程。
13、可选的,所述基于线控重载agv动力学机理建立线控重载agv动力学方程,包括:
14、基于线控重载agv动力学机理利用无人线控重载agv纵向、横向和垂向的受力情况建立线控重载agv动力学方程,其中,所述线控重载agv动力学方程为:
15、
16、其中,为纵向加速度,为横向加速度,为横向速度,为纵向速度,为横摆角速度,为横摆角加速度,fxf为前轮纵向受力,fxr为后轮纵向受力,m为线控重载agv质量,fyf为前轮横向受力,fyr为后轮横向受力,a为质心到前轴距离,b为质心到后轴距离,iz为线控重载agv的转动惯量;
17、可选的,所述基于所述线控重载agv运动学方程和线控重载agv动力学方程建立能量最优化纵向控制模型,包括:
18、基于所述线控重载agv运动学方程和线控重载agv动力学方程采用μ-s关系式进行路面附着系数识别,获得峰值路面附着系数和最佳滑移率,其中,所述μ-s关系式为:
19、
20、所述峰值路面附着系数表达式为:
21、
22、所述最佳滑移率表达式为:
23、
24、其中,c1,c2和c3均为典型路面拟合参数,μ为路面附着系数,s为滑移率,μmax为峰值路面附着系数,s0为最佳滑移率;
25、基于所述峰值路面附着系数和最佳滑移率计算总需求转矩,其中,所述总需求转矩表达式为:
26、ttq=thf+thw+thi,
27、其中,ttq为电机总需求转矩,thf为来自地面的滚动阻力矩;thw为来自空气阻力矩;thi为来自加速阻力矩/减速力矩;
28、基于所述总需求转矩利用电机map特性构建能量最优化纵向控制模型。
29、可选的,所述基于所述总需求转矩利用电机map特性构建能量最优化纵向控制模型,包括:
30、基于所述总需求转矩利用电机map特性中的电机驱动效率-转矩-转速关系构建能量最优化纵向控制模型,其中,所述电机驱动效率-转矩-转速关系式为:
31、ηm=f(tm,nm),
32、所述能量最优化纵向控制模型为:
33、
34、其中,驱动第一二桥转动的前电机在转速为n及转矩为ttrq1时驱动电机效率为η1,驱动第三四桥转动的后电机在转速为n及转矩为ttrq2时的驱动效率为η2。
35、可选的,所述基于所述线控重载agv运动学方程和线控重载agv动力学方程建立lqr横向控制模型,包括:
36、基于所述线控重载agv运动学方程和线控重载agv动力学方程利用lqr算法建立线性状态空间方程,其中,所述线性状态空间方程为:
37、
38、其中,a、b及c均为线性矩阵,u为最优控制函数,χ为状态向量,
39、基于所述线性状态空间方程设定并求解最小横向控制优化目标函数,获得最优控制函数。
40、可选的,所述基于所述线性状态空间方程设定并求解最小横向控制优化目标函数,获得最优控制函数,包括:
41、对所述线性状态空间方程进行离散化处理,获得离散线性状态空间方程;
42、基于所述离散线性状态空间方程设定并求解最小横向控制优化目标函数,获得最优控制函数,其中,所述最小横向控制优化目标函数为:
43、
44、其中,q、r均为权重正定矩阵,x为状态向量,u为最优控制函数。
45、可选的,所述基于所述能量最优化纵向控制模型和所述lqr横向控制模型构建纵横向协调控制策略,包括:
46、基于所述能量最优化纵向控制模型计算效率最优驱动转矩;
47、基于所述lqr横向控制模型计算最优实时转角;
48、基于所述效率最优驱动转矩和最优实时转角利用预设指标构建纵横向协调控制策略。
49、可选的,所述基于所述纵横向协调控制策略输出转矩控制指令和转角控制指令,包括:
50、基于所述纵横向协调控制策略利用can总线协议实时输出转矩控制指令和转角控制指令。
51、另外,本发明实施例还提供了一种无人线控重载agv纵横向协调控制装置,所述装置包括:
52、建立方程模块:基于线控重载agv运动学及动力学机理建立线控重载agv运动学方程和线控重载agv动力学方程;
53、能量最优化纵向控制模块:基于所述线控重载agv运动学方程和线控重载agv动力学方程建立能量最优化纵向控制模型;
54、横向控制模块:基于所述线控重载agv运动学方程和线控重载agv动力学方程建立lqr横向控制模型;
55、纵横向协调控制模块:基于所述能量最优化纵向控制模型和所述lqr横向控制模型构建纵横向协调控制策略;
56、输出指令模块:基于所述纵横向协调控制策略输出转矩控制指令和转角控制指令。
57、在本发明实施例中,首先建立无人线控重载agv运动学方程和动力学方程,在此基础上分别设计纵向控制策略和横向控制策略,纵向控制采用能耗最优化控制策略,横向控制采用lqr控制算法,然后将纵向控制和横向控制进行协调优化,形成纵横向协调控制策略,根据该策略能够实时输出最优的控制指令,不仅满足了重载agv高精度地跟随路径行驶和达到能量消耗最低的目的,还能够提高多场景、多工况的无人线控重载agv轨迹跟踪精度、平顺性及稳定性,进一步提升无人运输系统效率与安全性。
- 还没有人留言评论。精彩留言会获得点赞!