一种无人机飞行监控系统的制作方法
本发明属于无人机监控,更具体地,涉及一种无人机飞行监控系统。
背景技术:
1、我国通用航空事业不断发展,无人机具有综合成本低、效费比高,使用机动灵活等特点,过去十年,各种类型的无人机在军民两用方面得到了广泛的应用。然而伴随着民用无人机的快速发展,飞行安全等问题越来越凸显出来。
2、目前针对无人机飞行监视的手段,一般采用gps或北斗等卫星定位系统进行跟踪定位,获得位置与航迹信息后,通常采用4g等基站将定位信号传输至后台管理系统,目前基站还存在偏远地区并未覆盖的现象,故而会造成偏远地区执行飞行任务的无人机难做到实时定位和监视,若改用北斗短报文的方式可以解决上述问题,但其成本高,通讯设备复杂,很难部署安装到无人机上。
3、专利文献cn202210123261.7中,介绍了一种基于gps的无人机定位方法,但是在复杂的城市环境中或是在存在遮挡的情况下,该方法无法正常解决定位的问题;
4、专利文献cn201810138017.1中,介绍了一种融合gnss和uwb技术的定位方法,采用伪基站无人机通过uwb测距的方式为目标提供定位参考坐标,但该方法在定位前需要提前划定区域放飞伪基站无人机,才能实现对无人机的实行uwb定位,考虑到对无人机飞行监视是一个长期不间断过程,且不能预先获知在那块固定区域进行监控,所以放飞伪基站无人机的方式并不适合在不限定监控范围不限定监控时间的环境下使用;
5、同时,以上的现有技术只是在有限的的条件下解决了无人机定位问题,并没有解决无人机监管的技术问题。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种无人机飞行监控系统,其目的在于解决现有无人机定位技术存在限制较多,且没有实现无人机监管的技术问题。
2、为实现上述目的,本发明提供了一种无人机飞行监控系统,所述系统包括:
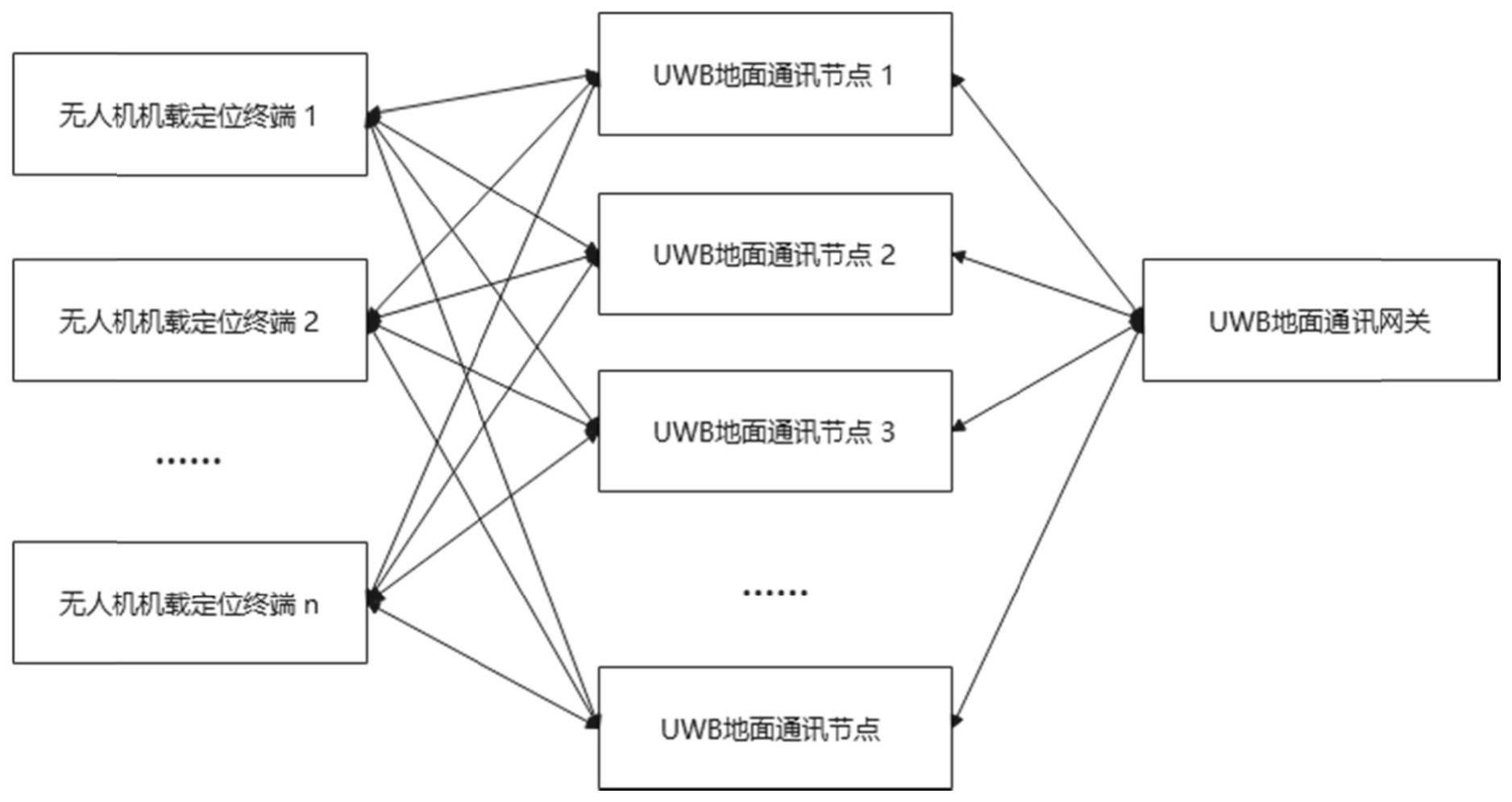
3、所述系统包括无人机载定位终端、地面通讯节点以及地面通讯网关;
4、所述无人机载定位终端安装在无人机上,用于测量无人机的飞行数据;并通过uwb技术和地面通讯节点通讯,测量与地面通讯节点之间的距离,获取地面通讯节点的固定位置;并根据三个以上地面通讯节点的固定位置和所述地面通讯节点与无人机之间的距离解算出无人机的位置;
5、所述地面通讯节点用于获取无人机的位置并传输至地面通讯网关;
6、所述地面通讯网关用于将无人机的位置发送至航空管制部门。
7、优选的,当前时刻:
8、若所述无人机载定位终端只能和三个地面通讯节点进行uwb通信,则根据所述三个地面通讯节点的固定位置和所述地面通讯节点与无人机之间的距离,解算出无人机位于三个相交球形的两个交点上,再结合无人机的高度或无人机前一时刻的位置,推导出无人机当前时刻的位置;
9、若所述无人机载定位终端只能和两个地面通讯节点进行uwb通信,则根据所述两个地面通讯节点的固定位置和所述两个地面通讯节点与无人机之间的距离,推导出无人机位于两个相交球形的相交圆周上,再结合无人机的高度,推导出无人机位于所述圆周和高度平面相交的两个点上;进一步结合无人机前一时刻位置的位置,推导出无人机当前时刻的位置;
10、若所述无人机载定位终端只能和一个地面通讯节点进行uwb通信,则根据所述地面通讯节点的固定位置和所述地面通讯节点与无人机之间的距离,推算出无人机位于以所述地面通讯节点为球心的球形上,再结合无人机的高度,推导出无人机位于所述球形和高度平面相交的圆周上,进一步结合无人机前一时刻位置的位置和飞行方向,推导出无人机当前时刻的位置;
11、若所述无人机载定位终端无法和地面通讯节点进行uwb通信,则根据无人机前一时刻位置和无人机的飞行数据推导出无人机当前时刻的位置。
12、优选的,所述无人机飞行数据包括无人机高度、机头朝向、飞行方向、俯仰角、滚转角、偏航角、速度以及速度方向。
13、优选的,所述地面通讯节点通过卫星定位信号获取地面通讯节点的固定位置。
14、优选的,所述地面通讯节点和所述地面通讯网关通过uwb技术进行无线自组网。
15、优选的,所述地面通讯网关通过移动网络将无人机位置发送至航空管制部门。
16、优选的,所述无人机载定位终端包括飞行数据采集单元、无人机通讯定位单元以及机载控制单元;
17、所述飞行数据采集单元包括陀螺仪、加速度计、地磁传感器和高度计;
18、所述无人机通讯定位单元用于通过uwb技术和地面通讯节点通讯,获取地面通讯节点的位置、计算和地面通讯节点之间的距离,推算无人机的位置;
19、所述机载控制单元用于实现无人机的飞行控制,以及实现对飞行数据采集单元和无人机通讯定位单元的控制。
20、优选的,所述地面通讯节点包括节点通讯定位单元、节点无线组网单元、节点控制单元以及卫星定位单元;
21、所述节点通讯定位单元用于通过uwb技术和无人机载定位终端通讯,将自己的位置发送给无人机载定位终端通讯;
22、所述卫星定位单元用于获取卫星定位信号,解算地面通讯节点的固定位置;
23、所述节点无线组网单元用于通过uwb技术和地面通讯网关进行无线组网;
24、所述节点控制单元用于管理节点通讯定位单元、节点无线组网单元以及gps单元。
25、优选的,其特征在于,所述地面通讯网关包括网关无线组网单元、网关控制单元以及远端通讯单元;
26、所述远端通讯单元用于通过移动网络将无人机位置发送至航空管制部门;
27、所述网关无线组网单元用于通过uwb技术和地面通讯节点进行无线组网;
28、所述网关控制单元用于管理远端通讯单元和网关无线组网单元。
29、优选的,所述地面通讯节点和地面通讯网关中包括电源管理单元,所述电源管理单元将太阳能转换为电能后为地面通讯节点和地面通讯网关供电。
30、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
31、(1)常规技术方案中,通常采用机载gps或北斗模块获取无人机位置,机载gps或北斗模块随无人机在飞行过程中,gps或北斗信号易受到设备、天气以及建筑等外在因素的干扰,因此无人机的位置信息不够稳定和准确;在本发明中,部署有多个地面通讯节点,无人机通过uwb技术和地面通讯节点通信,由此获取无人机和地面通讯节点之间的距离,再结合地面通讯节点的固定位置推算出无人机的位置;uwb信号的定位精度、抗干扰性和穿透性明显强于gps或北斗信号,因此,本发明定位方法优于gps或北斗定位;
32、(2)在本发明中,无人机载终端安装有飞行数据采集单元,可实时获取无人机的姿态数据,无人机和不同数量的地面通讯节点进行uwb通信时都可根据预设定位算法策略,由无人机前一时刻的位置数据,结合当前时刻无人机的飞行数据推算出无人机当前时刻位置;由此进一步保证无人机位置数据的稳定性和准确性;
33、(3)在本发明中,地面通讯节点和地面通讯网关采用uwb技术进行无线自组网,完成相互之间数据的传输,无需依靠现有网络,即使在移动网络未覆盖的地区也适用;
34、(4)在本发明中,地面通讯节点和地面通讯网关采用太阳能供电技术,由此本发明技术方案能支持野外无人值守工作,便于大区域分布部署。
- 还没有人留言评论。精彩留言会获得点赞!