一种前馈参数整定方法及装置与流程
本申请涉及工业控制,具体而言,涉及一种前馈参数整定方法及装置。
背景技术:
1、高精度运动台的控制方法在科研生产的各个领域具有重要的研究意义,如高精度数控加工、航空航天、半导体生产设备等领域。随着科学技术的快速发展,运动控制精度已经进入纳米级时代,各领域对运动控制精度提出了更高的要求。在对运动台进行非线性运动控制过程中,前馈参数的准确性直接影响运动控制系统的动态性能,不同运动轨迹下的前馈参数是不同的,需要对前馈参数进行整定,以保证纳米级高精度运动的动态性能。现有的高精度运动控制台的前馈参数整定方法,主要采用基于模型的离线整定方法。
2、现有的前馈参数整定方法,由于受机械装配精度和环境的影响而产生非线性因素,无法精确地构建动力学模型,导致前馈参数整定精度低问题。
技术实现思路
1、有鉴于此,本申请的目的在于提供一种前馈参数整定方法及装置,以解决前馈参数整定精度低的问题。
2、第一方面,本申请实施例提供了一种前馈参数整定方法,应用于运动台控制系统,运动台控制系统包括运动台,包括:
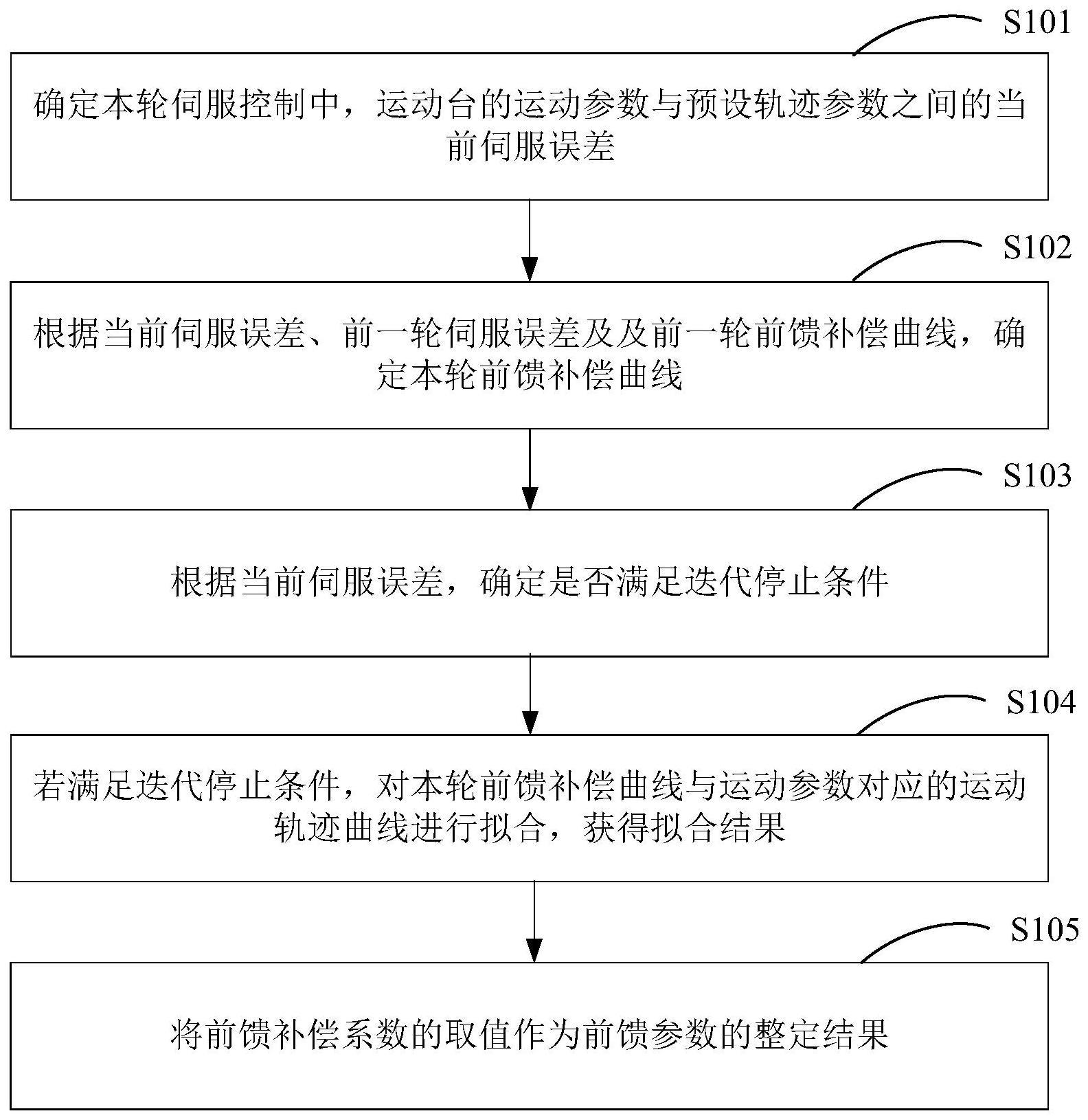
3、在对运动台进行伺服控制时,确定本轮伺服控制中运动台的运动参数与预设轨迹参数之间的当前伺服误差;
4、根据当前伺服误差、前一轮伺服误差及前一轮前馈补偿曲线,确定本轮前馈补偿曲线;
5、根据当前伺服误差,确定是否满足迭代停止条件;
6、若满足迭代停止条件,对本轮前馈补偿曲线与运动参数对应的运动轨迹曲线进行拟合,获得拟合结果,运动轨迹曲线包括多个前馈补偿系数,拟合结果包括前馈补偿系数的取值;
7、将前馈补偿系数的取值作为前馈参数的整定结果。
8、可选地,根据当前伺服误差、前一轮伺服误差及前一轮前馈补偿曲线,确定本轮前馈补偿曲线,包括:将迭代贡献值差值、第一控制器参数及前一轮伺服误差三者的乘积作为第一误差乘积,迭代贡献值差值是数值1与迭代贡献值的差值,迭代贡献值用于调整开环控制与闭环控制之间的迭代贡献;将迭代贡献值、第二控制器参数及当前伺服误差三者的乘积作为第二误差乘积;将第一误差乘积、第二误差乘积及前一轮前馈补偿曲线三者之和作为本轮前馈补偿曲线。
9、可选地,根据当前伺服误差,确定是否满足迭代停止条件,包括:确定当前伺服误差对应的多个运动平均值;根据多个运动平均值,确定多个运动均方差;从多个运动平均值中选取数值最大的运动平均值作为目标运动平均值,从多个运动均方差中选取数值最大的运动均方差作为目标运动均方差;确定目标运动平均值的绝对值是否小于或者等于运动平均值阈值,且目标运动均方差的绝对值是否小于或者等于运动均方差阈值;若目标运动平均值的绝对值小于或者等于运动平均值阈值,且目标运动均方差的绝对值小于或者等于运动均方差阈值,则确定满足迭代停止条件。
10、可选地,对本轮前馈补偿曲线与运动参数对应的运动轨迹曲线进行拟合,获得拟合结果,包括:根据运动参数,确定速度轨迹曲线、加速度轨迹曲线及急动度轨迹曲线;根据速度轨迹曲线、加速度轨迹曲线及急动度轨迹曲线,构建包括多个前馈补偿系数的运动轨迹曲线;建立本轮前馈补偿曲线与运动轨迹曲线之间的等式;利用粒子群算法对等式进行求解,确定多个前馈补偿系数的取值,以获得拟合结果。
11、可选地,多个前馈补偿系数包括速度补偿系数、加速度补偿系数及急动度补偿系数,本轮前馈补偿曲线与运动轨迹曲线之间的等式,包括:将速度补偿系数与速度轨迹曲线的乘积作为第一曲线乘积,将加速度补偿系数与加速度轨迹曲线的乘积作为第二曲线乘积,将急动度补偿系数与急动度轨迹曲线的乘积作为第三曲线乘积;将第一曲线乘积、第二曲线乘积及第三曲线乘积三者之和与本轮前馈补偿曲线之间的等式。
12、可选地,方法还包括:响应于前馈参数整定指令,获取运动台的当前运动轨迹对应的运动参数;确定运动参数与预设轨迹参数是否匹配;若匹配,对运动台进行伺服控制。
13、可选地,对运动台进行伺服控制,包括:对运动台同时进行开环控制及闭环控制。
14、可选地,运动参数包括多个,预设轨迹参数包括多个;确定运动参数与预设轨迹参数是否匹配,包括:针对每个运动参数,计算该运动参数的取值与预设轨迹参数中对应参数的取值的差值的绝对值,将差值的绝对值与设定阈值进行比较;若差值的绝对值小于或者等于设定阈值,则确定该运动参数与预设轨迹参数中的对应参数匹配;若差值的绝对值大于设定阈值,则确定该运动参数与预设轨迹参数中的对应参数不匹配;若运动参数中的每个参数都与预设轨迹参数中的对应参数匹配,则确定所述运动参数与所述预设轨迹参数匹配。
15、可选地,在确定是否满足迭代停止条件之后,还包括:若未满足迭代停止条件,存储本轮前馈补偿曲线及当前伺服误差;将本轮前馈补偿曲线作为下一轮伺服控制的前馈输入,开始下一轮伺服控制,返回执行确定本轮伺服控制中,运动台的运动参数与预设轨迹参数之间的当前伺服误差的步骤。
16、第二方面,本申请实施例还提供了一种前馈参数整定装置,应用于运动台控制系统,所述运动台控制系统包括运动台,所述装置包括:
17、伺服误差确定模块,用于在对运动台进行伺服控制时,确定本轮伺服控制中运动台的运动参数与预设轨迹参数之间的当前伺服误差;
18、补偿曲线确定模块,用于根据当前伺服误差、前一轮伺服误差及前一轮前馈补偿曲线,确定本轮前馈补偿曲线;
19、迭代停止判定模块,用于根据当前伺服误差,确定是否满足迭代停止条件;
20、曲线拟合模块,用于若满足迭代停止条件,对本轮前馈补偿曲线与运动参数对应的运动轨迹曲线进行拟合,获得拟合结果,运动轨迹曲线包括多个前馈补偿系数,拟合结果包括前馈补偿系数的取值;
21、整定结果确定模块,用于将前馈补偿系数的取值作为前馈参数的整定结果。
22、本申请实施例带来了以下有益效果:
23、本申请实施例提供的一种前馈参数整定方法及装置,能够在对运动台进行伺服控制的同时,对前馈参数进行迭代学习,使得迭代学习过程与自动控制流程相结合,无需使用人工整定,实现前馈参数的快速在线整定,与现有技术中的前馈参数整定方法相比,解决了前馈参数整定精度低的问题。
24、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种前馈参数整定方法,其特征在于,应用于运动台控制系统,所述运动台控制系统包括运动台,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述当前伺服误差、前一轮伺服误差及前一轮前馈补偿曲线,确定本轮前馈补偿曲线,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述当前伺服误差,确定是否满足迭代停止条件,包括:
4.根据权利要求1所述的方法,其特征在于,所述对所述本轮前馈补偿曲线与运动参数对应的运动轨迹曲线进行拟合,获得拟合结果,包括:
5.根据权利要求4所述的方法,其特征在于,所述多个前馈补偿系数包括速度补偿系数、加速度补偿系数及急动度补偿系数,所述本轮前馈补偿曲线与所述运动轨迹曲线之间的等式,包括:
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述对所述运动台进行伺服控制,包括:
8.根据权利要求6所述的方法,其特征在于,所述运动参数包括多个,所述预设轨迹参数包括多个;
9.根据权利要求1所述的方法,其特征在于,在所述确定是否满足迭代停止条件之后,还包括:
10.一种前馈参数整定装置,其特征在于,应用于运动台控制系统,所述运动台控制系统包括运动台,装置包括:
技术总结
本申请提供了一种前馈参数整定方法及装置,涉及工业控制技术领域,该方法包括:在对运动台进行伺服控制时,确定本轮伺服控制中运动台的运动参数与预设轨迹参数之间的当前伺服误差;根据当前伺服误差、前一轮伺服误差及前一轮前馈补偿曲线,确定本轮前馈补偿曲线;根据当前伺服误差,确定是否满足迭代停止条件;若满足迭代停止条件,对本轮前馈补偿曲线与运动参数对应的运动轨迹曲线进行拟合,获得拟合结果,运动轨迹曲线包括多个前馈补偿系数,拟合结果包括前馈补偿系数的取值;将前馈补偿系数的取值作为前馈参数的整定结果。通过采用上述前馈参数整定方法及装置,解决了现有技术中,前馈参数整定精度低的问题。
技术研发人员:王俊杰,李红钢,丁彦杰,贾闯闯,陈曦
受保护的技术使用者:北京半导体专用设备研究所(中国电子科技集团公司第四十五研究所)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!