一种四旋翼无人机固定时间分布式自适应编队控制方法
本发明涉及飞行器智能控制领域,具体为考虑多四旋翼无人机编队飞行的固定时间分布式自适应控制方法。
背景技术:
1、四旋翼无人机由于其结构轻巧,造价低廉,灵活性高等优点,被广泛应用于如高层建筑消防救援、农业植物保护等领域。随着应用需求的逐渐增高,多无人机协同编队飞行成为近年来的研究热点,其在抢险救灾、军用侦查和集群作战等方面都体现出更卓越的性能。为了满足一系列复杂的协同编队飞行的任务,更快速的响应速度在避免碰撞、快速到位等方面至关重要。文献(李磊,李小民,杨森.基于单位四元数的四旋翼编队反演控制方法,《计算机测量与控制》,2016年)考虑了四旋翼编队反步控制方法,但并未考虑执行器的收敛时间;专利(cn116149357a:杨闯,郭政业,王剑波,许嘉,雷宜安.一种多无人机分布式编队控制方法,《信息科技》,2023年)设计了有限时间观测器,但有限时间控制对系统状态初值较为敏感,不利于实现。因此,考虑固定时间收敛的分布式跟踪控制问题十分重要且有意义。
技术实现思路
1、本发明的目的在于提供一种四旋翼无人机固定时间分布式自适应编队控制方法。
2、实现本发明目的的技术解决方案为:一种四旋翼无人机固定时间分布式自适应编队控制方法,其特征在于,包括以下步骤:
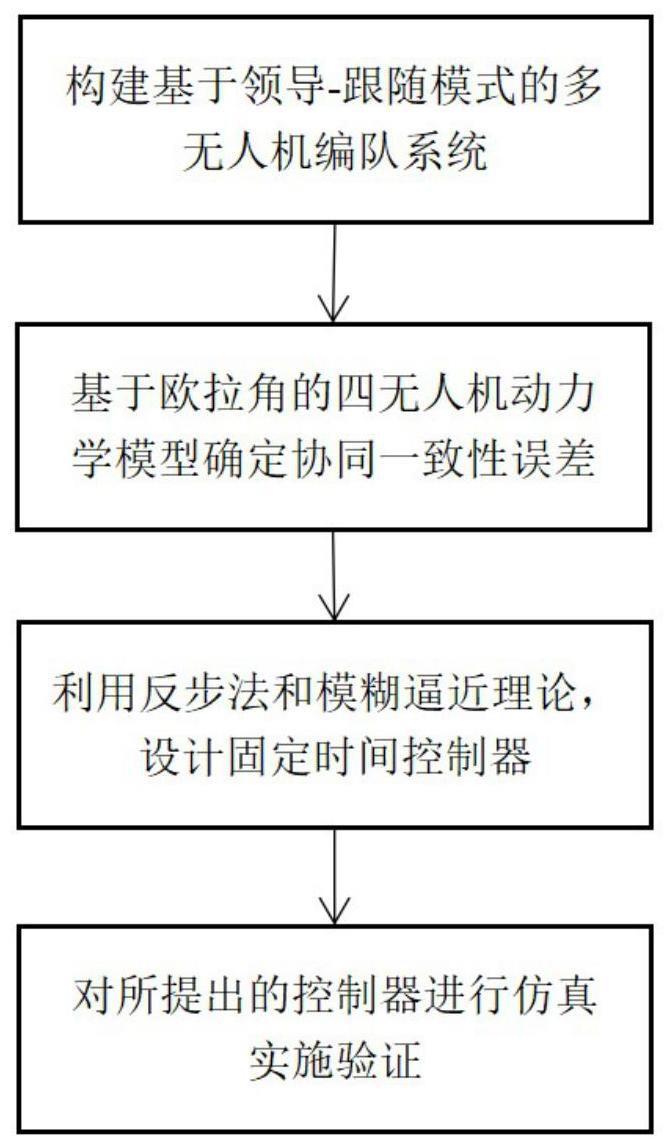
3、步骤1,基于有向图图论,结合多无人机之间的信息交互关系,构建一个领导-跟随模式的多无人机通信拓扑模型;
4、步骤2,基于牛顿-欧拉方程,构建四旋翼无人机动力学模型,确定编队控制目标下每台飞机的协同一致性误差;
5、步骤3,根据固定时间稳定性理论,使用反步法构建固定时间控制器,引入一个连续的开关函数,将控制器中状态空间划分为两个独立的部分;并引入模糊逻辑系统逼近控制器中的非线性函数,完成四旋翼无人机固定时间分布式跟踪控制;
6、步骤4,对位移数据进行可视化处理,获得整个四旋翼无人机编队系统的运动轨迹。
7、进一步的,步骤1,基于有向图图论,结合多无人机之间的信息交互关系,构建一个领导-跟随模式的多无人机通信拓扑模型,具体如下:
8、将多无人机通信拓扑模型用g={v,e,a}表示,其中v={v0,v1,v2,...,vn}代表参与编队的n+1台无人机,v0为领导节点,v1-vn为n个跟随节点;e={(i,j)∈v×v}代表编队在各有向信息路径组成的集合;a=[aij]∈rn×n代表加权邻接矩阵,用连接权重表示无人机之间的通信状态,当无人机i收到无人机j的信息时,有aij=1,否则aij=0,并且规定aii=0;所有向无人机i发送信息的个体所构成其邻居集记为ni={j∈v|aij=1}={j∈v|(j,i)∈e},领导节点邻接矩阵为b=diag{b1,b2,...,bn},当无人机i收到领导节点的信息时,有bi=1,否则bi=0;入度矩阵为d=diag{d1,d2,...,dn},di=∑aij代表节点i的入度,是矩阵a第i行所有元素之和。
9、进一步的,步骤2,基于牛顿-欧拉方程,构建四旋翼无人机动力学模型,确定编队控制目标下每台飞机的协同一致性误差,具体方法为:
10、(1)四旋翼无人机的动力学模型表示如下:
11、
12、其中x,y,z为无人机的位置,φ,θ,ψ为无人机的滚转角、俯仰角和偏航角,[τf,τφ,τθ,τψ]t∈r4×1为待设计的控制量,分别为无人机的总升力和三轴控制力矩,l为无人机质心到螺旋桨的长度,m是无人机的质量,g为重力加速度,ix,iy,iz为无人机关于x,y,z三个方向上的转动惯量,jr为电机转子和螺旋桨绕轴的总转动惯量,ωr为螺旋桨角速度向量;
13、令无人机状态x1=[x,y,z,φ,θ,ψ]t,控制增益非线性函数控制器u=[τf(cosψsinθcosφ+sinψsinφ),τf(sinψsinθcosφ-cosψsinφ),τfcosθcosφ,τφ,τθ,τψ]t,则上述模型转化为:
14、
15、(2)定义n个跟随飞机中i的协同一致性误差为:
16、
17、其中η1i为飞机i包含x1状态的协同一致性误差,η2i为飞机i包含x2状态的协同一致性误差,x1i为飞机i包括位置和姿态角的状态信息,x1j为飞机j包括位置和姿态角的状态信息,x2i为飞机i包括位移速度和姿态角速度的状态信息,aij为加权邻接矩阵中的元素,bi为飞机i与领导节点邻接矩阵中的元素,r为领导飞机包含位置和姿态角的状态信息,hij为预设的飞机i与j之间的位置、姿态差,hir为预设的飞机i与r之间的位置、姿态差,αi为飞机i待设计的控制量;
18、协同一致性误差的导数为:
19、
20、其中为协同一致性误差η1i的一阶导,为协同一致性误差η2i的一阶导,di代表节点i的入度,是矩阵a第i行所有元素之和,fi为飞机i的非线性函数,gi为飞机i的控制增益,为领导节点的位移速度和姿态角速度,为飞机i虚拟控制量αi的一阶导,ui为飞机i待设计的控制器。
21、进一步的,步骤3,根据固定时间稳定性理论,使用反步法构建固定时间控制器,并引入模糊逻辑系统逼近控制器中的非线性函数,完成四旋翼无人机固定时间分布式跟踪控制,具体方法为:
22、使用反步法设计固定时间控制器
23、(1)选取第一个李雅普诺夫函数:
24、
25、对式(5)求导可得;
26、
27、设计虚拟控制量αi,令:
28、
29、(2)引入开关函数
30、引入一个连续的开关函数θ(η1i),将η1i的状态空间划分为两个独立的部分,具体为:
31、
32、其中η1i为飞机i的协同一致性误差,δ>0为一个接近0的小的常数;
33、加入开关函数后,虚拟控制量αi为:
34、
35、在协同一致性误差接近0时,该切换函数可以在零点处避免奇点问题;
36、(3)选取第二个李雅普诺夫函数:
37、
38、其中为θ的估计误差,θ=wtw,为θ的自适应律,ξ为设计参数,对(10)求导可得:
39、
40、(4)使用模糊逻辑系统逼近非线性函数fi
41、
42、其中w为模糊逻辑系统权值,φ为模糊逻辑系统基函数,使用高斯函数,常数将(12)带入(11)得:
43、
44、根据杨氏不等式,有:
45、
46、
47、其中θ=wtw,a1>0,将(14)带入此式(13)可得:
48、
49、(5)设计控制器u:
50、
51、将(16)带入(15)得:
52、
53、设计(17)中自适应率:
54、
55、自此,在固定时间控制器(16)和自适应律(18)的作用下,四旋翼无人机的实际位置能在固定时间内跟上其期望编队位置,且当系统状态过零点时控制器不会因为奇点问题而失效。
56、进一步的,步骤4,对位移数据进行可视化处理,获得整个四旋翼无人机编队系统的运动轨迹,具体方法为:
57、在matlab中对每台无人机位移列阵进行可视化处理,得到整个编队系统的不同时刻的位形轨迹图。
58、一种四旋翼无人机固定时间分布式自适应编队控制方法,其特征在于,基于权利要求1-5任一项所述的四旋翼无人机固定时间分布式编队控制方法,实现考虑领航-跟随模式的四旋翼无人机固定时间编队跟踪控制。
59、一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时,基于权利要求1-5任一项所述的四旋翼无人机固定时间分布式跟踪控制方法,实现多四旋翼无人机编队系统的固定时间分布式跟踪控制。
60、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,基于权利要求1-5任一项所述的四旋翼无人机固定时间分布式跟踪控制方法,实现多四旋翼无人机编队系统的固定时间分布式跟踪控制。
61、本发明与现有技术相比,其显著优点为:(1)由于采用了固定时间稳定性理论,本发明相较于有限时间控制算法,可在不考虑系统初值的情况下实现控制;(2)引入模糊逼近理论,使得所设计的控制方法能处理建模过程中的复杂非线性函数;(3)引入一种新的切换函数,解决固定时间控制器中状态过零点时会出现的奇点问题(4)设计固定时间控制相对于渐近跟踪控制,不仅使得跟踪误差在有限时间内达到控制目的,而且增加了控制器的抗干扰性。
- 还没有人留言评论。精彩留言会获得点赞!