一种远程无人机控制方法和设备
本发明属于数据处理,尤其涉及一种远程无人机控制方法和设备。
背景技术:
1、随着科技的不断进步,无人机技术在军事、民用及商业领域都得到了广泛应用。传统的遥控方式虽然便捷,但在一些特殊情况下,如复杂环境、高风险区域或需要高度准确性的任务中,遥控方式的局限性逐渐显现。为了克服这些限制,脑机接口技术逐渐崭露头角,其中脑控远程无人机成为了一种备受关注的控制方式。
2、脑控远程无人机技术是一种创新的控制方式,利用人脑电信号解码操作者的意图,将其转化为无人机的控制命令,实现无人机在远距离内的精准操控。相较于传统的遥控方式,脑控远程无人机技术具有许多优势。首先,它消除了传统遥控中需要手部操作的需求,使得操作者能够更加专注于任务本身。其次,脑控远程无人机技术具备潜在的高度精确性,可以在复杂环境中完成精细的控制任务。此外,脑控技术为行动不便或残疾人士提供了更为自主的操控手段,拓展了应用范围。
3、目前,在脑控远程无人机技术中,最常用的脑电信号解码技术之一是ssvep技术,即闪烁视觉诱发电位技术。这种技术通过在屏幕上以不同频率闪烁的刺激来引发特定频率的脑电信号,操作者通过注视不同频率的刺激来传达控制意图。尽管ssvep技术为脑控远程无人机技术带来了前所未有的可能性,但目前仍存在一些挑战和问题。特别是在空间感知能力和空间控制能力方面存在一些困难。在空间感知能力方面,操作者往往能够更好地感知二维空间,但在面对三维空间时,其认知效果显著下降。这导致操作者难以通过意念在三维空间中精准地操控无人机。因此,对于三维空间内的一些障碍物信息,操作者在远程控制的条件下对无人机进行快速精准的调整。此外,脑机接口解码模块输出的控制指令存在离散化和延迟的问题,而实际场景中往往需要连续、流畅的控制,这限制了脑控远程无人机技术的应用领域。
技术实现思路
1、为解决上述技术问题,本发明提出了一种远程无人机控制方法和设备,用于解决现有脑控远程无人机技术中空间感知能力差和空间控制能力差的问题。
2、为实现上述目的,一方面,本发明提供了一种远程无人机控制方法,包括:
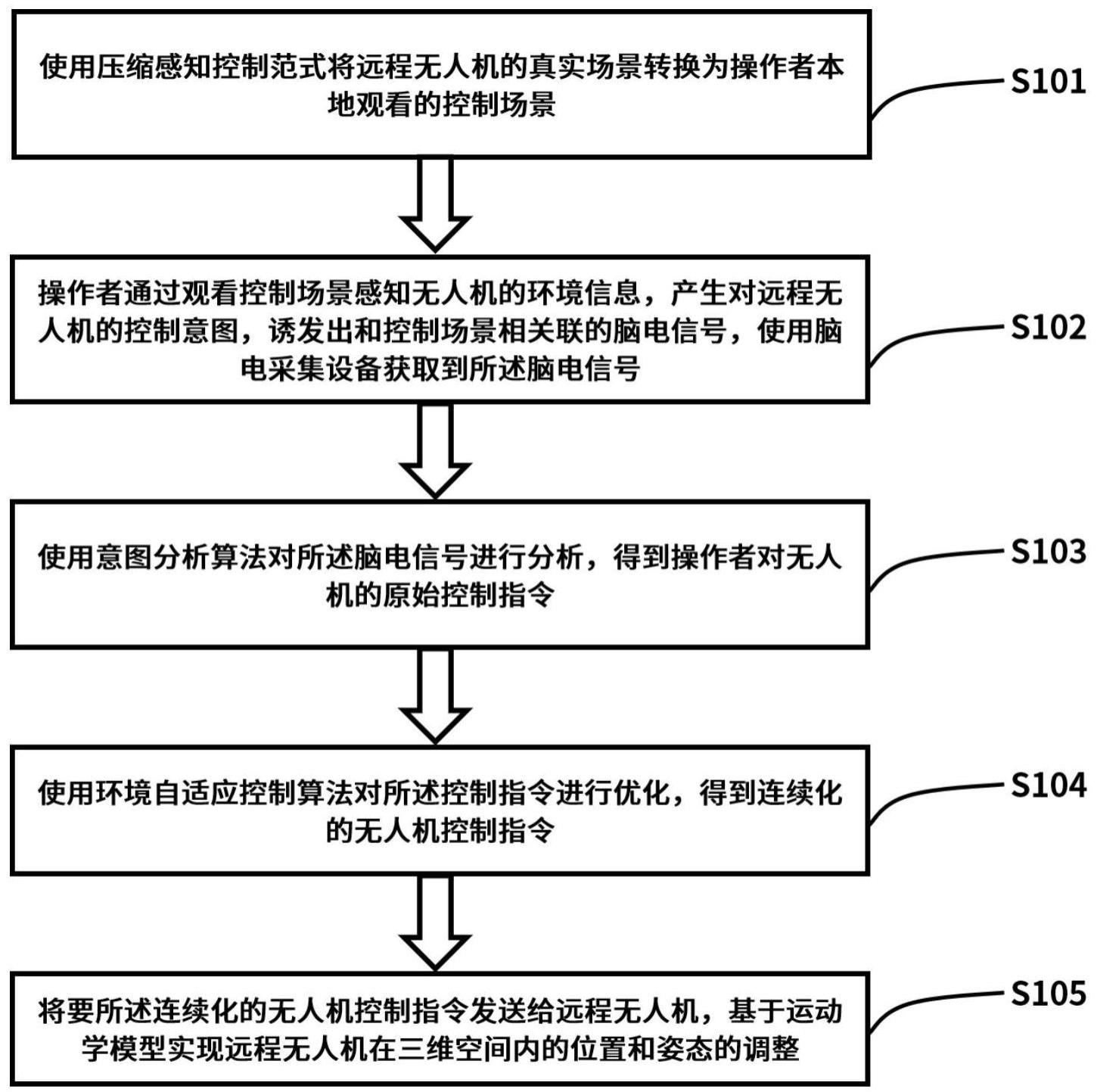
3、获取本地控制场景,其中,所述本地控制场景由利用压缩感知控制范式将所述远程无人机的三维环境信息进行处理获取;
4、获取操作者观看所述本地控制场景时产生的脑电信号;
5、采用意图分析算法对所述脑电信号进行分析,获取所述操作者对所述远程无人机的原始控制指令;
6、通过环境自适应控制算法对环境信息和所述原始控制指令进行优化,获取连续化的无人机控制指令,其中所述环境信息为障碍物位置信息和雷达位置信息,所述原始控制指令为矢量速度控制指令;
7、将所述连续化的无人机控制指令发送至所述远程无人机,并基于运动学模型对所述远程无人机进行控制。
8、可选的,获取本地控制场景包括:
9、通过雷达对所述三维环境信息进行采集,获取所述障碍物位置信息;
10、并采集所述雷达位置信息和目标点位置信息;
11、基于所述障碍物位置信息、所述雷达位置信息、所述目标点位置信息和时间戳,获取原始数据包;
12、将所述原始数据包进行压缩后传输到本地,对压缩后的数据进行解码和重建,获取所述本地控制场景。
13、可选的,获取所述本地控制场景之后还包括:在所述本地控制场景中的远程无人机周围设置若干动态闪烁刺激块,所述动态闪烁刺激块用于控制方向,其中,每个所述动态闪烁刺激块具有唯一的id和固定频率的闪烁刺激。
14、可选的,采用意图分析算法对所述脑电信号进行分析,获取所述操作者对所述远程无人机的原始控制指令包括:
15、对所述脑电信号进行预处理和加窗处理,获取数据矩阵;
16、基于所述脑电信号的分类结果和对应的所述动态闪烁刺激块的闪烁刺激,获取模板矩阵;
17、将所述数据矩阵和所述模板矩阵输入相关性网络,获取相关系数矩阵;
18、获取所述相关系数矩阵中的最大值,并将所述最大值与预设阈值进行比较,获取最终脑电分类结果;
19、根据所述最终脑电分类结果,获取所述原始控制指令。
20、可选的,对所述脑电信号进行预处理和加窗处理,获取数据矩阵包括:
21、通过陷波滤波操作对所述脑电信号进行工频干扰的去除,并通过带通滤波对所述脑电信号中包含特征电位的频段进行提取,完成对所述脑电信号的预处理;
22、基于预设长度的时间窗对预处理后的脑电信号进行截取并矩阵化,获取所述数据矩阵。
23、可选的,所述相关性网络包括输入层、卷积层、池化层、全连接层和输出层;
24、所述输入层,用于将所述数据矩阵和所述模板矩阵输入所述卷积层;
25、所述卷积层,用于获取所述数据矩阵和所述模板矩阵的局部特征,并提取出不同尺度的特征图;
26、所述池化层,用于对所述特征图进行下采样,获取池化后的特征图;
27、所述全连接层,用于将所述池化后的特征图展平为向量,通过所述全连接层将特征映射到所述相关性系数矩阵的空间,获取归一化的相关性系数矩阵;
28、所述输出层,用于输出归一化的相关性系数矩阵。
29、可选的,通过环境自适应控制算法对环境信息和所述原始控制指令进行优化,获取连续化的无人机控制指令包括:
30、s1、将所述远程无人机的运动学模型作为系统模型,将所述系统模型进行离散化;
31、s2、根据所述远程无人机的任务特征建立目标函数;
32、s3、获取所述环境信息和所述原始控制指令,在当前离散时间步骤,基于所述目标函数、所述环境信息和所述原始控制指令建立预测优化问题;
33、s4、利用优化算法对所述预测优化问题进行求解,获取当前时间步骤所述远程无人机的最佳控制输入;
34、s5、进入下一个离散时间步骤,重复步骤s3-s4,获取连续化的无人机控制指令。
35、可选的,所述目标函数为:
36、
37、其中,j为目标函数,wspeed是速度误差项的权重,m是预测时域长度,vdesired是期望无人机速度,vk是第k时刻的无人机实际速度,wcontrol控制输入变化项的权重,uk、uk+1、uk+2分别是是第k、k+1、k+2时刻的无人机控制输入,wobstacle是避障项的权重,wi是第i个障碍物的权重,di是无人机到第i个障碍物的距离,wsmooth为平滑性项的权重。
38、另一方面,本发明还提供了一种远程无人机控制设备,包括:
39、包括:压缩感知控制单元、脑电信号采集单元、意图分析单元、环境自适应控制单元、远程通信单元和无人机单元;
40、所述压缩感知控制单元,用于利用压缩感知控制范式将所述远程无人机的三维环境信息进行处理,获取本地控制场景;
41、所述脑电信号采集单元,用于获取操作者观看所述本地控制场景时产生的脑电信号;
42、所述意图分析单元,用于采用意图分析算法对所述脑电信号进行分析,获取所述操作者对所述远程无人机的原始控制指令;
43、所述环境自适应控制单元,用于通过环境自适应控制模型对环境信息和所述原始控制指令进行优化,获取连续化的无人机控制指令;
44、所述远程通信单元,用于将所述连续化的无人机控制指令发送至所述远程无人机;
45、所述无人机单元,用于接收所述连续化的无人机控制指令,并基于运动学模型对所述远程无人机进行控制。
46、可选的,所述压缩感知控制单元包括环境信息采集子单元、压缩数据传输子单元、二维场景重建子单元和动态刺激生成子单元;
47、所述环境信息采集子单元,用于通过雷达对所述三维环境信息进行采集,获取障碍物位置信息,并采集雷达位置信息和目标点位置信息,基于所述障碍物位置信息、所述雷达位置信息、所述目标点位置信息和时间戳,获取原始数据包;
48、所述压缩数据传输子单元,用于将所述原始数据包进行压缩并传输到本地;
49、所述二维场景重建子单元,用于对压缩后的数据进行解码和重建,获取所述本地控制场景;
50、所述动态刺激生成子单元,用于在所述本地控制场景中的无人机周围部署闪烁刺激块,为每一个方向的控制分别分配唯一的id和固定频率的闪烁刺激。
51、本发明技术效果:
52、本发明采用压缩感知控制范式技术手段,将远程无人机的真实场景转换为操作者本地观看的控制场景,从而消除了操作者在现场的需要,提升了远程控制的便捷性。通过压缩感知技术,本发明有效编码和传输场景信息,确保操作者能够准确感知控制场景,进一步增强了控制精度。
53、本发明采用脑机接口技术手段,解决了传统遥控方式在特殊环境下的局限性问题。通过获取操作者在观看控制场景时产生的脑电信号,将其转化为无人机的控制命令。这种创新的控制方式不仅消除了手部操作的需求,使操作者更专注于任务本身,还赋予了行动不便或残疾人士更为自主的操控手段,拓展了无人机应用的范围。
54、本发明采用环境自适应控制算法技术手段,解决了脑机接口技术中控制指令离散化和延迟的问题。通过对操作者的原始控制指令以及环境信息进行优化,生成连续化的无人机控制指令。这种优化策略不仅提升了控制指令的流畅性,也使得无人机在复杂环境中的操控更为精准稳定。
- 还没有人留言评论。精彩留言会获得点赞!