基于PLC的设备伺服位置控制方法及系统与流程
本发明属于设备控制,具体涉及一种基于plc的设备伺服位置控制方法及系统。
背景技术:
1、plc通过总线将控制信号传递到伺服驱动器上,控制信号通常包含转矩信息、转速信息又或者是位置信息。接收到控制命令的驱动器发出指令脉冲给运动电机,电机按照命令内容做出具体的行为。
2、现阶段,机械设备上通过plc或上位软件发送位置、速度、启动指令控制伺服驱动电机带动负载移动,利用伺服本身编码器来计算位置,这种控制方案由于没有形成闭环,当电机在转负载间隙过大或负载安装不到位时,导致负载设备可能不动,并且这种情况是检测不出来的,导致伺服位置控制精度过低,无法适用在运动和控制精度要求较高的设备上。
技术实现思路
1、为此,本发明提供一种基于plc的设备伺服位置控制方法及系统,解决电机转负载间隙大或负载安装不到位情况下负载可能不动,导致的控制精度差的问题。
2、为了实现上述目的,本发明提供如下技术方案:基于plc的设备伺服位置控制方法,包括:
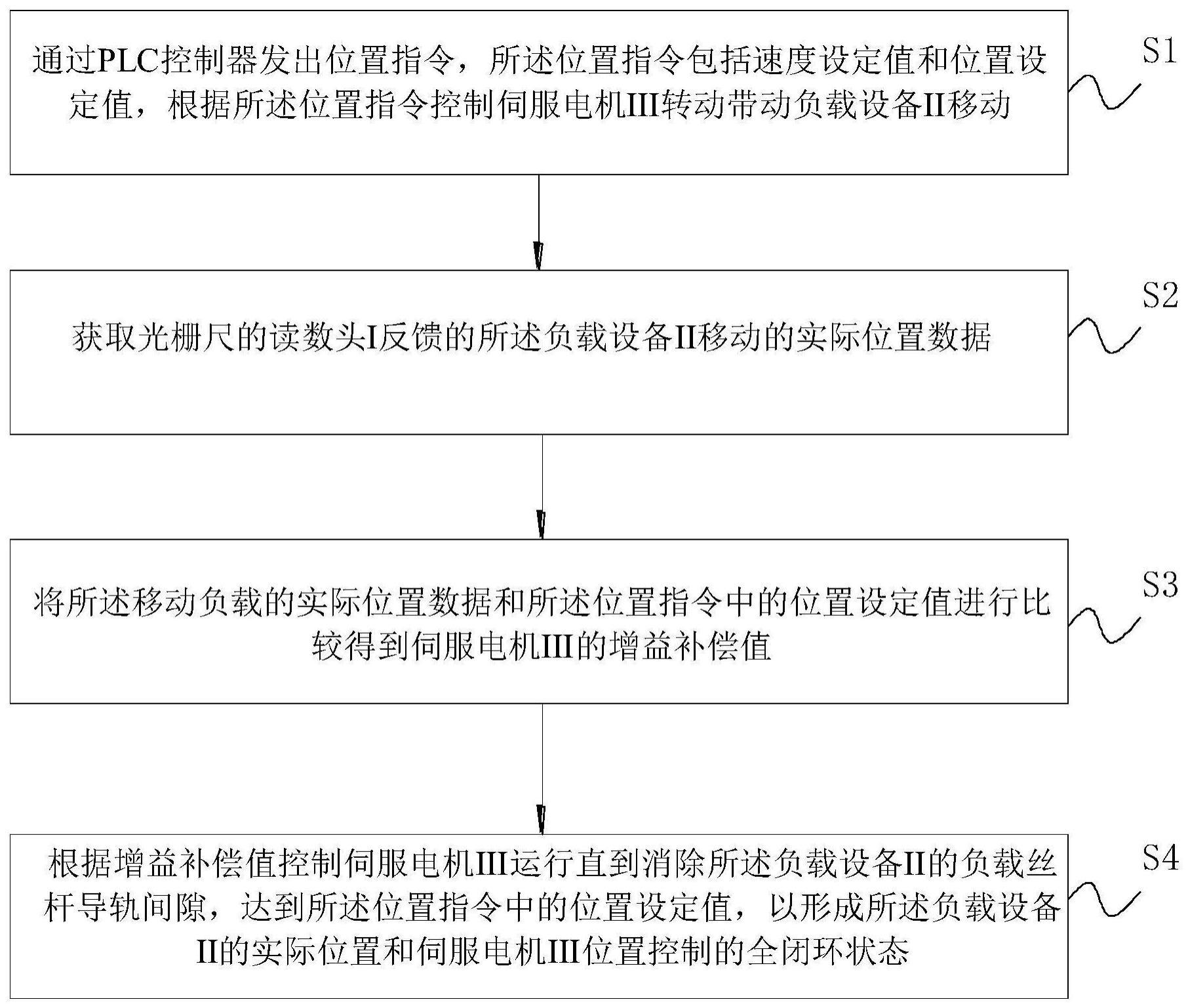
3、通过plc控制器发出位置指令,所述位置指令包括速度设定值和位置设定值,根据所述位置指令控制伺服电机转动带动负载设备移动;
4、获取光栅尺的读数头反馈的所述负载设备移动的实际位置数据,将所述移动负载的实际位置数据和所述位置指令中的位置设定值进行比较得到伺服电机的增益补偿值;
5、根据增益补偿值控制伺服电机运行直到消除所述负载设备的负载丝杆导轨间隙,达到所述位置指令中的位置设定值,以形成所述负载设备的实际位置和伺服电机位置控制的全闭环状态。
6、作为基于plc的设备伺服位置控制方法优选方案,根据所述位置指令控制伺服电机转动带动负载设备移动的控制策略为:
7、n=(setpos-actpos)/dpi
8、式中,n为伺服电机的转数,setpos为负载设备的位置设定值,actpos为负载设备的实际位置;dpi为负载设备的丝杆精度对应脉冲。
9、作为基于plc的设备伺服位置控制方法优选方案,光栅尺读数头反馈的所述负载设备移动的实际位置数据为:
10、
11、式中,actpos为负载设备的实际位置,n为伺服电机的转数,i为伺服电机的减速比,l为负载设备丝杆的机械导程,l0负载设备丝杆的间隙。
12、作为基于plc的设备伺服位置控制方法优选方案,将光栅尺安装在所述负载设备的移动平台上,光栅尺与所述负载设备的负载丝杆导轨处于平行状态;
13、将光栅尺的读数头安装在所述负载设备上,栅尺的读数头跟随所述负载设备移动以实时检测所述负载设备的移动位置。
14、作为基于plc的设备伺服位置控制方法优选方案,光栅尺读数头的电缆通过模块接口转接到plc控制器的扩展模块;
15、模块接口包括引脚01和引脚02,引脚01和引脚02用于对光栅尺读数头进行电源供电;
16、模块接口还包括引脚10和引脚12,引脚10用于作为光栅尺读数头的clock+信号接口,引脚12用于作为光栅尺的clock-信号接口;
17、模块接口还包括引脚15和引脚23,引脚15用于作为光栅尺读数头的data+信号接口,引脚23用于作为光栅尺的data-信号接口。
18、本发明还提供一种基于plc的设备伺服位置控制系统,包括:
19、位置指令下发模块,用于通过plc控制器发出位置指令,所述位置指令包括速度设定值和位置设定值,根据所述位置指令控制伺服电机转动带动负载设备移动;
20、实际位置检测模块,用于获取光栅尺的读数头反馈的所述负载设备移动的实际位置数据;
21、增益补偿分析模块,用于将所述移动负载的实际位置数据和所述位置指令中的位置设定值进行比较得到伺服电机的增益补偿值;
22、增益补偿执行模块,用于根据增益补偿值控制伺服电机运行直到消除所述负载设备的负载丝杆导轨间隙,达到所述位置指令中的位置设定值,以形成所述负载设备的实际位置和伺服电机位置控制的全闭环状态。
23、作为基于plc的设备伺服位置控制系统优选方案,所述位置指令下发模块中,根据所述位置指令控制伺服电机转动带动负载设备移动的控制策略为:
24、n=(setpos-actpos)/dpi
25、式中,n为伺服电机的转数,setpos为负载设备的位置设定值,actpos为负载设备的实际位置;dpi为负载设备的丝杆精度对应脉冲。
26、作为基于plc的设备伺服位置控制系统优选方案,所述实际位置检测模块中,光栅尺读数头反馈的所述负载设备移动的实际位置数据为:
27、
28、式中,actpos为负载设备的实际位置,n为伺服电机的转数,i为伺服电机的减速比,l为负载设备丝杆的机械导程,l0负载设备丝杆的间隙。
29、作为基于plc的设备伺服位置控制系统优选方案,将光栅尺安装在所述负载设备的移动平台上,光栅尺与所述负载设备的负载丝杆导轨处于平行状态;
30、将光栅尺的读数头安装在所述负载设备上,栅尺的读数头跟随所述负载设备移动以实时检测所述负载设备的移动位置。
31、作为基于plc的设备伺服位置控制系统优选方案,光栅尺读数头的电缆通过模块接口转接到plc控制器的扩展模块;
32、模块接口包括引脚01和引脚02,引脚01和引脚02用于对光栅尺读数头进行电源供电;
33、模块接口还包括引脚10和引脚12,引脚10用于作为光栅尺读数头的clock+信号接口,引脚12用于作为光栅尺的clock-信号接口;
34、模块接口还包括引脚15和引脚23,引脚15用于作为光栅尺读数头的data+信号接口,引脚23用于作为光栅尺的data-信号接口。
35、本发明具有如下优点:通过plc控制器发出位置指令,所述位置指令包括速度设定值和位置设定值,根据所述位置指令控制伺服电机转动带动负载设备移动;获取光栅尺的读数头反馈的所述负载设备移动的实际位置数据,将所述移动负载的实际位置数据和所述位置指令中的位置设定值进行比较得到伺服电机的增益补偿值;根据增益补偿值控制伺服电机运行直到消除所述负载设备的负载丝杆导轨间隙,达到所述位置指令中的位置设定值,以形成所述负载设备的实际位置和伺服电机位置控制的全闭环状态。本发明能够检测负载真实移动的数据,弥补电机转动负载没有移动导致的设备位置控制差异,提高负载设备位置精度。
技术特征:
1.基于plc的设备伺服位置控制方法,其特征在于,包括:
2.根据权利要求1所述的基于plc的设备伺服位置控制方法,其特征在于,根据所述位置指令控制伺服电机转动带动负载设备移动的控制策略为:
3.根据权利要求2所述的基于plc的设备伺服位置控制方法,其特征在于,光栅尺读数头反馈的所述负载设备移动的实际位置数据为:
4.根据权利要求1所述的基于plc的设备伺服位置控制方法,其特征在于,将光栅尺安装在所述负载设备的移动平台上,光栅尺与所述负载设备的负载丝杆导轨处于平行状态;
5.根据权利要求4所述的基于plc的设备伺服位置控制方法,其特征在于,光栅尺读数头的电缆通过模块接口转接到plc控制器的扩展模块;
6.基于plc的设备伺服位置控制系统,其特征在于,包括:
7.根据权利要求6所述的基于plc的设备伺服位置控制系统,其特征在于,所述位置指令下发模块中,根据所述位置指令控制伺服电机转动带动负载设备移动的控制策略为:
8.根据权利要求7所述的基于plc的设备伺服位置控制系统,其特征在于,所述实际位置检测模块中,光栅尺读数头反馈的所述负载设备移动的实际位置数据为:
9.根据权利要求6所述的基于plc的设备伺服位置控制系统,其特征在于,将光栅尺安装在所述负载设备的移动平台上,光栅尺与所述负载设备的负载丝杆导轨处于平行状态;
10.根据权利要求9所述的基于plc的设备伺服位置控制系统,其特征在于,光栅尺读数头的电缆通过模块接口转接到plc控制器的扩展模块;
技术总结
基于PLC的设备伺服位置控制方法及系统,通过PLC控制器发出位置指令,所述位置指令包括速度设定值和位置设定值,根据所述位置指令控制伺服电机转动带动负载设备移动;获取光栅尺的读数头反馈的所述负载设备移动的实际位置数据,将所述移动负载的实际位置数据和所述位置指令中的位置设定值进行比较得到伺服电机的增益补偿值;根据增益补偿值控制伺服电机运行直到消除所述负载设备的负载丝杆导轨间隙,达到所述位置指令中的位置设定值,以形成所述负载设备的实际位置和伺服电机位置控制的全闭环状态。本发明能够检测负载真实移动的数据,弥补电机转动负载没有移动导致的设备位置控制差异,提高负载设备位置精度。
技术研发人员:陈海涛,安然,张永长,吕有涛,李波,高正江
受保护的技术使用者:中航迈特增材科技(北京)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!