一种基于驾驶模拟器的控制算法测试方法及其装置
本发明涉及控制算法的测试,具体为一种基于驾驶模拟器的控制算法测试方法及其装置。
背景技术:
1、随着汽车电控系统的广泛应用,对于控制算法的可靠性要求越来越高。对于控制算法的提出了一系列的测试方法,验证其算法可靠性。目前各大汽车生产商普遍采用基于v型开发的算法测试流程,该方法通过算法离线仿真、快速原型、自动代码生成、硬件在环、整车测试等5个阶段进行控制算法的全面测试。该方法能够有效缩短控制算法的开发周期,并降低开发成本。但是对于信号传输特性导致的算法可靠性问题只能通过实车测试才能发现,使得算法开发需要重新修改并再次进行v型测试流程。并且传统的控制算法离线仿真验证时,车辆动力学模型与控制算法之间直接通过信号线进行连接,这样并不完全反映了实际车辆与控制器之间的真实的信号传输关系。目前市场上的汽车主要通过can网络实现控制器与车辆信息的交互。
2、传统的测试方法局限性:在控制算法的前期测试阶段,只进行了车辆的动力学特性的建模,车辆动力学模型与控制算法之间直接采用信号线连接,并对控制算法进行测试。并没有模拟实际车辆与控制器之间的can网络信号传输特性:如实际控制器输入接口中各个信号的采样周期并不完全一致,控制器输出信号的输出频率不一致,且各个信号的数据类型不一致,以及车载can网络的传输速率对控制算法的影响,(比如受通信负载等诸多因素限制,实际车辆轮速信号每隔20ms才会往can总线发送一次数据,并且发送的数据类型并不是双精度类型。但是在前期离线仿真测试算法时,通常会忽略这些因素,通常变量的类型设置都比实际车辆中的信号的数据类型精度高。)这些现象都会对控制算法的可靠性产生影响。由于没有对车载can网络进行建模,所以无法完全模拟真实车辆以控制器之间的关系。导致很多由于仿真信号与实际信号传输特性不一致造成的算法可靠性问题无法在开发前期检查出来,当后期测试时发现控制算法没有考虑信号传输特性的因素而存在功能问题时,便会重新进行算法开发、测试,导致后期测试时间成本、以及试验成本更高。
3、综上所述,由于没有模拟真实的控制算法与车辆模型之间的信号传输关系,也就是说缺少虚拟can网络模型,不能真实反映实际车辆与控制器之间的信号传输关系,所以在控制算法开发的前期阶段,无法检测出信号传输特性不一致造成的算法可靠性问题。
4、因此,提出一种基于驾驶模拟器的控制算法测试方法及其装置来解决上述技术问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于驾驶模拟器的控制算法测试方法及其装置,解决了背景技术中提出的问题。
3、(二)技术方案。
4、本发明为了实现上述目的具体采用以下技术方案:
5、一种基于驾驶模拟器的控制算法测试方法,包括以下步骤:
6、s1、将驾驶环境舱内的工控机与车辆动力学模型系统pc机器通过以太网电缆相连;
7、s2、车辆动力学模型系统pc机器与实时仿真系统1通过以太网电缆相连。s3、实时仿真系统1与pc通过以太网电缆相连;
8、s4、实时仿真系统2的硬件系统内部的以太网接口与pc机器上的以太网接口通过以太网电缆相连;
9、s5、实时仿真系统2与实时仿真系统1的can接口通过导线相连;
10、s6、将虚拟车载can网络模型以及信号收发程序在simulink环境下进行编译、下载、运行至实时仿真系统1内部;
11、s7、将控制算法模型及其can信号收发程序进行编译、下载、运行至实时仿真系统2内部的ds1401板卡上;
12、s8、通过在pc机器上的搭建控制算法程序变量监控脚本,并与实时仿真系统2建立通信连接;
13、s9、启动驾驶模拟器系统:包括驾驶环境舱以及车辆动力学及其环境模拟系统;
14、s10、驾驶员通过启动驾驶舱内的车辆,进入控制算法测试状态。
15、进一步地,所述实时仿真系统2上的can高电平接口与实时仿真系统1上的can高电平接口相连;实时仿真系统2上的can低电平接口与实时仿真系统1上的can低电平接口相连。
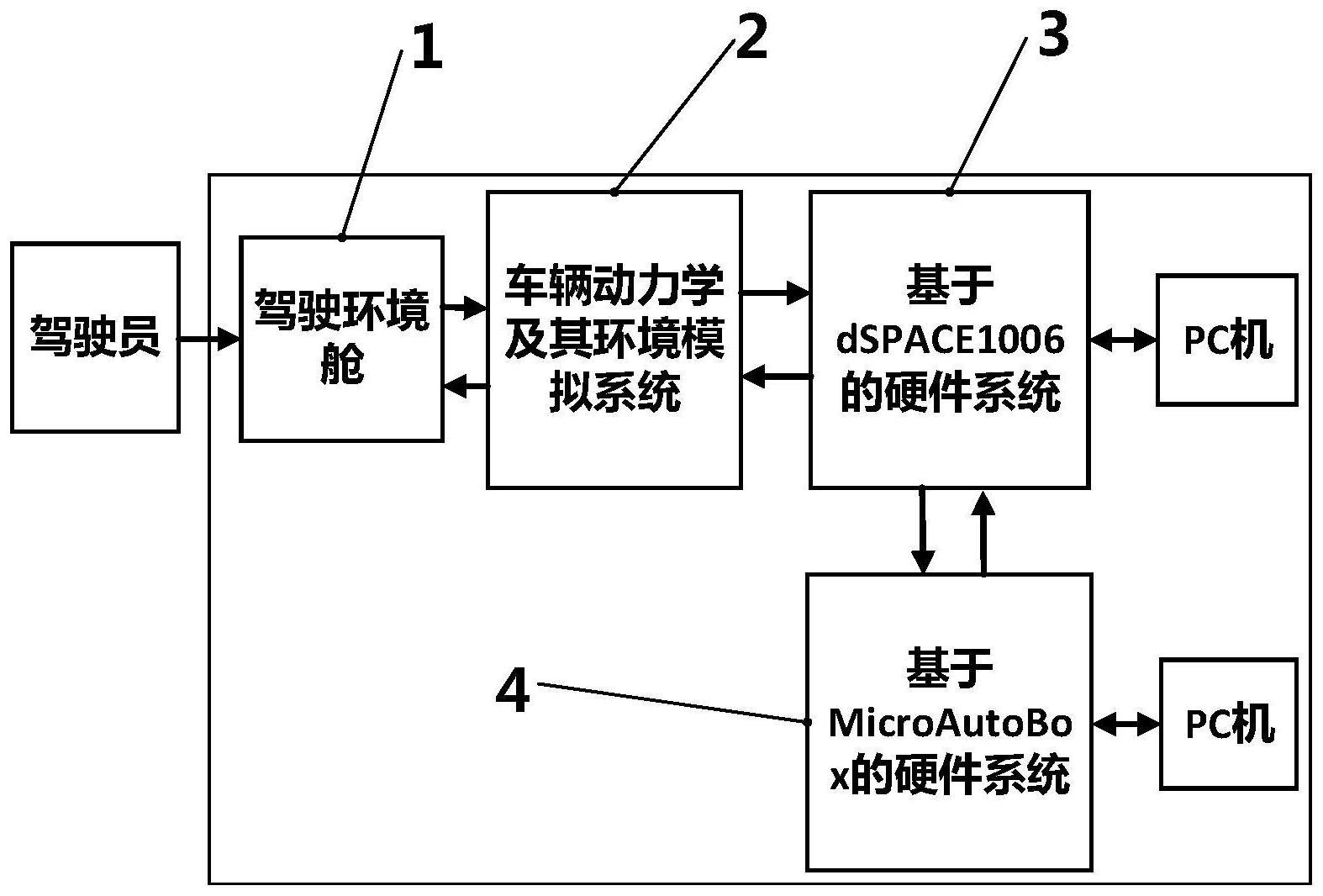
16、一种基于驾驶模拟器的控制算法的测试装置,所述测试装置包括驾驶环境舱、车辆动力学及其环境模拟系统、实时仿真系统1、实时仿真系统2以及两台分别与实时仿真系统1、实时仿真系统2相连的pc机器。
17、进一步地,所述的驾驶环境舱与车辆动力学及其环境模拟系统之间采用以太网连接,用于将驾驶操作信号通过以太网的方式传输到车辆动力学及其环境模拟系统,并实现将用于在驾驶环境舱显示信号首先通过can信号传输至实时仿真系统1,并通过以太网通信方式,从实时仿真系统1传送到驾驶环境舱,用于人机交互。
18、进一步地,所述的车辆动力学及其环境模拟系统与实时仿真系统1之间采用以太网连接,将计算的车辆动力学响应信号通过以太网通信的方式传输到实时仿真系统1中,并同时将实时仿真系统2中控制算法的输出信号通过can通信的方式传输到实时仿真系统1,将实时仿真系统2中控制算法的输出信号以以太网通信方式传输到车辆动力学及其环境模拟系统,实现控制算法与车辆动力学模型之间的数据通信。
19、进一步地,所述的实时仿真系统1与pc机器之间通过以太网连接,通过上位机建立虚拟车载can网络模型、编译、下载并运行至实时仿真系统1,实现在实时仿真系统1下的虚拟车载can网络模拟以及实现实时仿真系统1的以太网信号收发、can信号收发的功能。
20、进一步地,所述实时仿真系统2与pc机器之间通过以太网进行连接,通过上位pc机进行控制算法模型搭建、编译、下载并运行至实时仿真系统2中,实现控制算法实时运行至实时仿真系统2中,同时,在上位pc机器上通过编写脚本程序对控制算法测试结果进行监控。
21、进一步地,所述实时仿真系统1是基于dspace1006的硬件系统,实时仿真系统2是基于m icroautobox的硬件系统。
22、(三)有益效果
23、与现有技术相比,本发明提供了一种基于驾驶模拟器的控制算法测试方法及其装置,具备以下有益效果:
24、1、本发明,通过采用真实驾驶员替代驾驶员模型,使得更加接近实际驾驶员开车情况,算法测试有效性更高,对于实际车辆的仿真模拟,不但通过搭建车辆动力学整车模型模拟实际车辆的动力学特性,而且搭建了虚拟车载can网络模型模拟实际车辆的can总线通信,实现了真实车辆的数字化模拟,通过虚拟车载can网络模型模拟实际车辆的can通信架构,能够在控制算法开发前期就能发现控制算法模型由于信号传输特性导致的可靠性问题。
25、2、本发明,通过由于采用了基于驾驶模拟器的测试方法,搭建了虚拟车载can网络模型,并采用真实驾驶员进行测试,能够更加准确的模拟各种危险工况下的控制算法的可靠性问题。提高了控制算法测试的驾驶员的安全性,本发明的意义在于通过虚拟车载can网络模型,驾驶模拟器,真实驾驶员三者相结合的测试方法及其装置,能够实现在控制算法开发的前期阶段,检测出信号传输特性不一致造成的算法可靠性问题,降低了算法开发周期以及测试成本。
- 还没有人留言评论。精彩留言会获得点赞!