一种机器人路径规划方法及装置、电子设备、计算机可读介质与流程
本申请涉及视路径规划,具体涉及一种机器人路径规划方法及装置、电子设备、计算机可读介质。
背景技术:
1、随着自动化技术引入制造业,智慧工厂中引入了很多机器人帮助提高生产效率。在很多岗位中需要工人与机器人协同完成产品的生产,当前人机协作中的一个主要挑战是如何为机器人提供自主能力,以让机器人高效地与人类近距离协同工作。在智能工厂中,机器人和人类通常执行循环任务,人类的运动往往是重复和可预测的。如果能够高效地利用这种知识并设计人机协作控制算法,通过预测人类的轨迹计算机器人行动路径上无障碍时间窗口,从而主动避免因为人类移动在机器人路径上形成动态障碍而造成机器人生产中断的问题。
2、相关技术中,路径规划方法通常分为两种,一种是在规划时根据时间、障碍物的位置计算安全间隔并确保机器人可达性,一种是根据人类行为来动态及时的修改机器人运动路径,如快速扩展随机树和概率路线图的最新变体能让机器人对障碍物当前姿势进行判断,并及时规划路径,但是过去的规划方法通常只考虑当前的静态姿势,而不考虑障碍物的时间变化,导致机器人路径的延迟和生产延误。
技术实现思路
1、为解决上述技术问题,本申请的实施例提供了一种机器人路径规划方法及装置、电子设备、计算机可读介质。
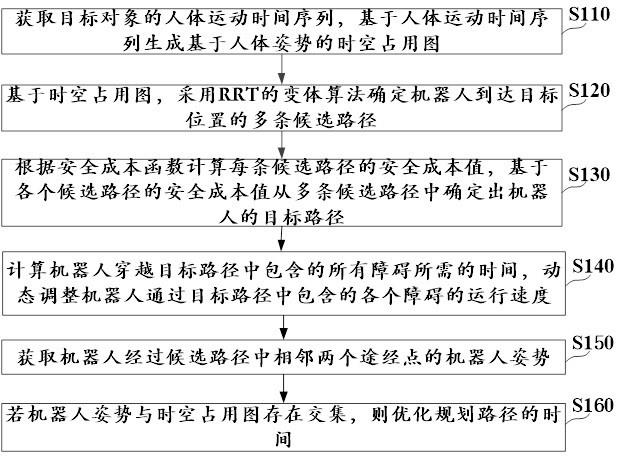
2、根据本申请实施例的一个方面,提供了一种机器人路径规划方法,包括:获取目标对象的人体运动时间序列,基于所述人体运动时间序列生成基于人体姿势的时空占用图;基于所述时空占用图,采用rrt的变体算法确定机器人到达目标位置的多条候选路径;根据安全成本函数计算每条候选路径的安全成本值,基于各个候选路径的安全成本值从所述多条候选路径中确定出所述机器人的目标路径;计算机器人穿越所述目标路径中包含的所有障碍所需的时间,动态调整机器人通过所述目标路径中包含的各个障碍的运行速度;获取机器人经过所述候选路径中相邻两个途经点的机器人姿势;若所述机器人姿势与所述时空占用图存在交集,则优化规划路径的时间。
3、根据本申请实施例的一个方面,提供了一种机器人路径规划装置,包括:获取模块,配置为获取目标对象的人体运动时间序列,基于所述人体运动时间序列生成基于人体姿势的时空占用图;候选路径确定模块,配置为基于所述时空占用图,采用rrt的变体算法确定机器人到达目标位置的多条候选路径;目标路径确定模块,配置为根据安全成本函数计算每条候选路径的安全成本值,基于各个候选路径的安全成本值从所述多条候选路径中确定出所述机器人的目标路径;运行速度动态调整模块,配置为计算机器人穿越所述目标路径中包含的所有障碍所需的时间,动态调整机器人通过所述目标路径中包含的各个障碍的运行速度;机器人姿势获取模块,配置为获取机器人经过所述候选路径中相邻两个途经点的机器人姿势;路径优化模块,配置为若所述机器人姿势与所述时空占用图存在交集,则优化规划路径的时间。
4、根据本申请实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述电子设备实现如前所述的机器人路径规划方法。
5、根据本申请实施例的一个方面,提供了一种计算机可读介质,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行如上所述的机器人路径规划方法。
6、在本申请的实施例所提供的技术方案中,本申请基于人体运动时间序列生成基于人体姿势的时空占用图,采用rrt的变体算法确定机器人到达目标位置的多条候选路径,根据安全成本函数计算每条候选路径的安全成本值,基于各个候选路径的安全成本值从所述多条候选路径中确定出所述机器人的目标路径,根据机器人穿越目标路径中包含的所有障碍所需的时间,动态调整机器人通过目标路径中包含的各个障碍的运行速度。本申请利用整个任务期间预测的人体动态行为,而不是将其视为静态障碍或及时评估,可以避免因为动态障碍造成的机器人生产中断,提高生产效率,同时根据预测轨迹可以提高机器人的运行速度及生产效率。
7、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种机器人路径规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述时空占用图中包括目标对象关节点占用三维空间时机器人回避所述目标对象的回避时间间隔,所述回避时间间隔的计算表达式如下:
3.根据权利要求2所述的方法,其特征在于,所述若所述机器人姿势与所述时空占用图存在交集,则优化规划路径的时间,包括:
4.根据权利要求3所述的方法,其特征在于,所述候选路径中相邻两个途经点的时间间隔,计算表达式如下:
5.根据权利要求1所述的方法,其特征在于,所述采用rrt的变体算法确定机器人到达目标位置的多条候选路径,包括:
6.根据权利要求2所述的方法,其特征在于,在所述根据安全成本函数计算每条候选路径的安全成本值,基于各个候选路径的安全成本值从所述多条候选路径中确定出所述机器人的目标路径之后,所述方法还包括:
7.一种机器人路径规划装置,其特征在于,包括:
8.一种电子设备,其特征在于,包括:
9.一种计算机可读介质,其特征在于,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行如权利要求1至6中任一项所述的机器人路径规划方法。
技术总结
本申请的实施例揭示了一种机器人路径规划方法及装置、电子设备、计算机可读介质。该方法包括:获取目标对象的人体运动时间序列,生成基于人体姿势的时空占用图;基于时空占用图,采用RRT的变体算法确定机器人到达目标位置的多条候选路径;基于各个候选路径的安全成本值从多条候选路径中确定出机器人的目标路径;计算机器人穿越目标路径中包含的所有障碍所需的时间,动态调整机器人通过目标路径中包含的各个障碍的运行速度;获取机器人经过候选路径中相邻两个途经点的机器人姿势;若机器人姿势与时空占用图存在交集,则优化规划路径的时间。本申请的实施例可以避免因为动态障碍造成的机器人生产中断,提高生产效率。
技术研发人员:刘振东,王兴鹏,吴恩德,蔡振浩
受保护的技术使用者:宁德思客琦智能装备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!