一种无模型自适应控制方法及装置、设备、存储介质与流程
本申请涉及计算机,尤其涉及一种无模型自适应控制方法及装置、设备、存储介质。
背景技术:
1、在生产设备运行的过程中,会产生大量的运行数据,这些数据涵盖了系统的各种状态信息和过程信息,在调整系统状态、评估系统性能、诊断系统故障等方面具有重要作用。研究人员在思考如何利用这些有价值的数据的过程中,“数据驱动”的概念应运而生,该想法最初在计算机科学中被提出,后来逐渐与控制理论相结合成为了解决复杂非线性系统模型的控制问题的一种解决方案,数据驱动控制代表着新型控制理论的诞生,引起了广泛关注。
2、在第四次工业革命的时代背景下,制造业的发展脚步正朝着多元的智能化方向前进,各种智能化生产设备的大规模使用使得企业生产效率显著提升。而生产技术和设备规模不断扩大和提升使得控制系统中的被控对象模型逐渐向着高复杂度、强耦合性以及时变性的方向发展,这导致基于工程实际建立的数学模型非常复杂,而且很难通过建立精确数学模型对系统进行描述,所以研究不依靠系统精确数学模型的控制器设计方法尤为重要。
技术实现思路
1、本申请提供了一种无模型自适应控制方法及装置、设备、存储介质,用于解决目前基于工程实际建立的数学模型非常复杂,而且很难通过建立精确数学模型对系统进行描述的问题。
2、为达到上述目的,本申请采用如下技术方案:
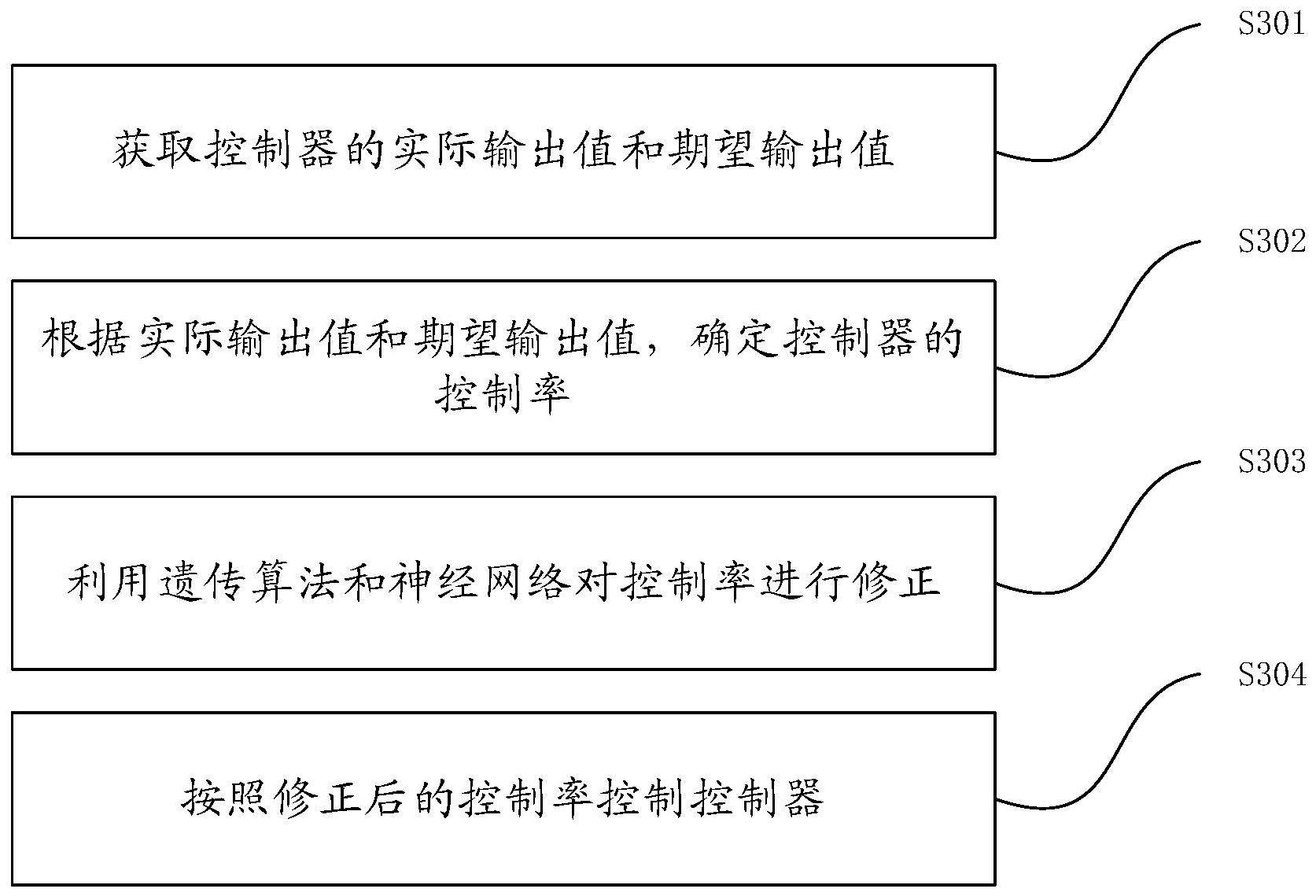
3、第一方面,本申请提供了一种无模型自适应控制方法,包括:获取控制器的实际输出值和期望输出值,进而根据实际输出值和期望输出值,确定控制器的控制率,再利用遗传算法以及神经网络对控制器的控制率进行修正,并按照修正后的控制率控制该控制器。
4、本申请提供的五模型自适应控制方法,通过获取控制器的实际输出值以及期望输出值,根据实际输出值以及期望输出值,确定控制器的控制率,可以使控制器不依赖于被控对象的精确模型信息,仅包含模型输入、输出和模型信息的估计,达到简化复杂系统建模过程的同时保证对被控变量精确有效控制的目的。进而再利用遗传算法和神经网络对控制率进行修正,通过利用遗传算法对控制器中的参数进行全局优化,利用神经网络对控制器的建模误差进行实时的自适应补偿,以使控制器性能达到最佳。
5、一种可能的实现方式中,根据实际输出值和期望输出值,确定控制器的控制率,包括:确定控制器的控制模型。利用反步法将控制模型转换为级联函数。利用实际输出值和期望输出值,确定实际输出值与期望输出值的跟踪误差和误差变量。利用级联函数、跟踪误差和误差变量,确定控制器的控制率。
6、该可能的实现方式中,通过确定控制器的控制模型,将控制模型转换为级联函数,并利用实际输出值和期望输出值确定跟踪误差和误差变量,最终利用级联函数、跟踪误差和误差变量,确定控制器的控制率,可以使控制器不依赖于被控对象的精确模型西悉尼,仅包含模型的输入、输出和模型信息的估计,达到简化复杂系统建模过程的同时保证对被控变量精确有效控制的目的。
7、一种可能的实现方式中,控制器的控制率包括:至少一个待赋值参数。利用遗传算法对控制率进行修正,包括:利用遗传算法确定至少一个待赋值参数的适应度,进而确定适应度最大的待赋值参数为目标赋值参数。
8、该可能的实现方式中,通过利用遗传算法确定至少一个待赋值参数的适应度,再确定适应度最大的待赋值参数为目标参数。通过利用一拆你算饭对控制器的参数进行全局优化,以保证控制器性能达到最佳。
9、一种可能的实现方式中,控制器的控制率包括:未建模动态项。利用神经网络对控制率进行修正,包括:利用神经网络,确定控制率的建模误差。进而利用建模误差对未建模动态项进行修正。
10、该可能的实现方式中,通过利用神经网络,确定控制器的控制率的建模误差,进而利用该建模误差对未建模动态项进行修正,可以保证利用神经网络对控制器的建模误差进行实时的自适应补偿,以使控制器性能达到最佳。
11、第二方面,本申请提供了一种无模型自适应控制装置,包括:获取模块、确定模块、修正模块、控制模块。
12、其中,获取模块,用于获取控制器的实际输出值和期望输出值。
13、确定模块,用于根据实际输出值和期望输出值,确定控制器的控制率。
14、修正模块,用于利用遗传算法和神经网络对控制率进行修正。
15、控制模块,用于按照修正后的控制率控制控制器。
16、一种可能的实现方式中,确定模块,具体用于确定控制器的控制模型。利用反步法将控制模型转换为级联函数。利用实际输出值和期望输出值,确定实际输出值与期望输出值的跟踪误差和误差变量。利用级联函数、跟踪误差和误差变量,确定控制器的控制率。
17、一种可能的实现方式中,控制器的控制率包括:至少一个待赋值参数。修正模块,具体用于利用遗传算法确定至少一个待赋值参数的适应度。确定适应度最大的待赋值参数为目标待赋值参数。
18、一种可能的实现方式中,控制器的控制率包括:未建模动态项。修正模块,还用于利用神经网络,确定控制率的建模误差。利用建模误差对未建模动态项进行修正。
19、第三方面,本申请提供了一种无模型自适应控制设备,该无模型自适应控制设备具有实现上述第一方面或第二方面的方法的功能。该功能可以通过硬件实现,也可以通过硬件执行相应的软件实现。该硬件或软件包括一个或多个与上述功能相对应的模块。
20、第四方面,本申请提供了一种计算机可读存储介质,该计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机可以执行上述第一方面或第一方面中任一种可能的实现方式或第二方面或第二方面中任一种可能的实现方式的无模型自适应控制方法。
21、其中,第二方面至第四方面中任一种设计方式所带来的技术效果可参见第一方面及其各种实现方式中不同设计方式所带来的技术效果,此处不再赘述。
22、本申请中第二方面到第五方面及其各种实现方式的具体描述,可以参考第一方面及其各种实现方式中的详细描述;并且,第二方面到第四方面及其各种实现方式的有益效果,可以参考第一方面及其各种实现方式中的有益效果分析,此处不再赘述。
23、本申请的这些方面或其他方面在以下的描述中会更加简明易懂。
技术特征:
1.一种无模型自适应控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述实际输出值和所述期望输出值,确定所述控制器的控制率,包括:
3.根据权利要求1所述的方法,其特征在于,所述控制器的控制率包括:至少一个待赋值参数;所述利用遗传算法对所述控制率进行修正,包括:
4.根据权利要求1所述的方法,其特征在于,所述控制器的控制率包括:未建模动态项;所述利用神经网络对所述控制率进行修正,包括:
5.一种无模型自适应控制装置,其特征在于,包括:
6.根据权利要求5所述的装置,其特征在于,
7.根据权利要求5所述的装置,其特征在于,所述控制器的控制率包括:至少一个待赋值参数;
8.根据权利要求5所述的装置,其特征在于,所述控制器的控制率包括:未建模动态项;
9.一种无模型自适应控制设备,其特征在于,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器执行如权利要求1-4中任一项所述的无模型自适应控制方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-4中任一项所述的无模型自适应控制方法。
技术总结
本申请公开了一种无模型自适应控制方法及装置、设备、存储介质,涉及计算机技术领域,解决了目前基于工程实际建立的数学模型非常复杂,而且很难通过建立精确数学模型对系统进行描述的问题。该方法包括:获取控制器的实际输出值和期望输出值。根据实际输出值和期望输出值,确定控制器的控制率。利用遗传算法和神经网络对控制率进行修正。按照修正后的控制率控制控制器。
技术研发人员:李文娇,曹景镇
受保护的技术使用者:中国联合网络通信集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!