一种基于刚性编队的机器人协作控制系统
本发明涉及多智能体控制,更具体的说是涉及一种基于刚性编队的机器人协作控制系统。
背景技术:
1、智能化产业的不断推进为人类带来了诸多便利,人们可以使用机器人进行大量重复简单的劳动。其中,搬运作业是机器人的一个重要应用场景。在工业应用中,人们逐渐发现,单个机器人越来越不能胜任一些繁重的工作,比如搬运质量较大的物体,因此我们需要探索如何使各个机器人之间相互配合,相互协同来达到期望目的。多个机器人相互协作以实现搬运目的的场景叫做协作搬运。目前常见的协作搬运平台使用多个可移动机械臂进行搬运,并且在控制过程中采用力控制的方法,这一方法需要在机器人上加装力传感器,成本较高。已有的包括柔顺控制在内的位置控制方法,容易在搬运过程中使被搬运物体的内部产生内应力,可能对物体造成不同程度的损坏。此外,现有的协作搬运方法只考虑到将物体从一个位置搬运到另一个位置,没有在搬运过程中考虑对被搬运物体的姿态进行控制,限制了实际应用。
2、因此,如何避免对被搬运物体的损失以及控制搬运物体的姿态,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于刚性编队的机器人协作控制系统,避免了搬运过程中对被搬运物体的拉扯损伤,并且能够在搬运过程中有效控制被搬运物体的姿态。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种基于刚性编队的机器人协作控制系统,包括:图像采集模块、多智能体感知模块、运动控制模块和驱动模块;
4、所述图像采集模块用于获取待搬运物的几何形状;
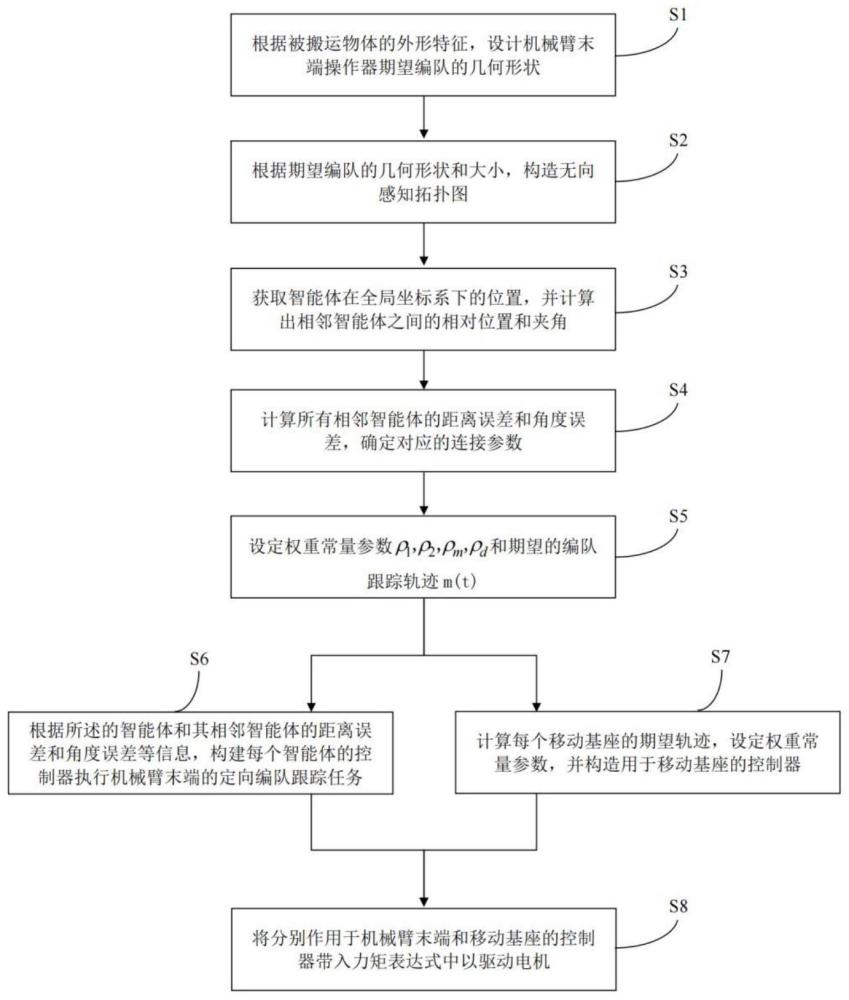
5、所述无向感知模块用于根据待搬运物的几何形状确认期望编队队形并构建无向感知拓扑图;根据无向感知拓扑图中各个智能体的全局坐标计算智能体间的相对距离和相对夹角,并确认相邻关系;
6、所述运动控制模块用于接收控制指令并根据智能体间的相对距离误差、相对夹角误差和相邻关系构建控制器;
7、所述驱动模块用于根据所述控制器产生力矩以驱动电机执行任务。
8、进一步的,所述期望编队队形包括:确认编队中各智能体的空间位置和期望距离,使期望编队的外形和期望距离与被搬运物的外形特征一致。
9、进一步的,所述构建无向感知图为包括:
10、引入虚拟智能体,并进行编号;
11、无向感知拓扑图表示为:g=(n,e);
12、其中,n={1,2,...,n},e={(i,j)|(i,j)∈n×n,i,j∈n},n和e分别表示由n个智能体组成的顶点集和无向图的边集;顶点集坐标p=[p1,...pn]
13、根据顶点集坐标p=[p1,...pn]计算无向拓扑图中各边的长度得到边场函数集f(p)=[d1,...,dk,...]并确认刚性矩阵为:
14、根据所述刚性矩阵对无向拓扑图进行约束,约束条件为:
15、
16、其中,m智能体所在空间的维数;n为智能体的个数。
17、进一步的,所述相邻智能体之间的相对位置和夹角的计算方法为:
18、能体i与智能体j之间的相对距离为rij=||pi-pj||;
19、相对夹角为向量pj-pi与全局坐标系x坐标轴的正方向的夹角θij。相应地,智能体i与智能体j之间的期望夹角记作
20、进一步的,所述确认相邻关系,包括:
21、计算方法如下:两个相邻智能体,智能体i和智能体j距离误差由eij=rij-dij计算;夹角误差由计算。连接参数aij为预设的参数,其确定方法如下:若智能体i,j相邻,则aij=1,反之aij=0。
22、进一步的,所述构建控制器包括:
23、根据智能体间的距离误差和角度误差构建机械臂末端控制器;
24、根据预设的每个智能体的期望轨迹进和权重常量参数,构建移动基座控制器。
25、进一步的,所述机械臂末端控制器包括:
26、
27、
28、
29、
30、
31、其中,为施加在虚拟智能体上的控制器,为施加在领导者上的控制器,为施加在其他智能体上的控制器,ρ1,ρ2,ρm,ρd为预设的权重参量,ωi,τi为中间变量,mtra,分别为领导者智能体对应的机械臂末端的期望轨迹,期望速度和期望加速度。
32、进一步的,所述移动基座控制器包括:
33、
34、其中,分别为领导者智能体的移动基座的期望轨迹,期望速度和期望加速度。
35、进一步的,所述根据所述控制器产生力矩,包括:
36、将机械臂末端控制器和/或移动基座控制器代入构建的力矩表达式,得到力矩。
37、进一步的,所述力矩表达式通过对机械臂末端和移动基座进行动力学解耦得到。
38、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于刚性编队的机器人协作控制系统,通过分布式刚性编队控制的方法使抓取末端形成了一个和被搬运物体外形一致的定向刚性编队,从而避免了搬运过程中对被搬运物体的拉扯损伤,并且能够在搬运过程中有效控制被搬运物体的姿态。
技术特征:
1.一种基于刚性编队的机器人协作控制系统,其特征在于,包括:图像采集模块、多智能体感知模块、运动控制模块和驱动模块;
2.根据权利要要求1所述的一种基于刚性编队的机器人协作控制系统,其特征在于,所述期望编队队形包括:确认编队中各智能体的空间位置和期望距离,使期望编队的外形和期望距离与被搬运物的外形特征一致。
3.根据权利要求1所述的一种基于刚性编队的机器人协作控制系统,其特征在于,所述构建无向感知图包括:
4.根据权利要求3所述的一种基于刚性编队的机器人协作控制系统,其特征在于,所述相邻智能体之间的相对位置和夹角的计算方法为:
5.根据权利要求4所述的一种基于刚性编队的机器人协作控制系统,其特征在于,所述确认相邻关系,包括:
6.根据权利要求3所述的一种基于刚性编队的机器人协作控制系统,其特征在于,所述构建控制器包括:
7.根据权利要求6所述的一种基于刚性编队的机器人协作控制系统,其特征在于,所述机械臂末端控制器包括:
8.根据权利要求6所述的一种基于刚性编队的机器人协作控制系统,其特征在于,所述移动基座控制器包括:
9.根据权利要求6所述的一种基于刚性编队的机器人协作控制系统,其特征在于,所述根据所述控制器产生力矩,包括:
10.根据权利要求9所述的一种基于刚性编队的机器人协作控制系统,其特征在于,所述力矩表达式通过对机械臂末端和移动基座进行动力学解耦得到。
技术总结
一种基于刚性编队的机器人协作控制系统,包括:图像采集模块,用于获取待搬运物的几何形状;无向感知模块,用于根据待搬运物的几何形状确认期望编队队形并构建无向感知拓扑图;根据无向感知拓扑图中各个智能体的全局坐标计算智能体间的相对距离和相对夹角,并确认相邻关系;运动控制模块,用于接收控制指令并根据智能体间的相对距离误差、相对夹角误差和相邻关系构建控制器;驱动模块,用于根据控制器产生力矩以驱动电机执行任务;本发明通过分布式刚性编队控制的方法使抓取末端形成了一个和被搬运物体外形一致的定向刚性编队,从而避免了搬运过程中对被搬运物体的拉扯损伤,并且能够在搬运过程中有效控制被搬运物体的姿态。
技术研发人员:赵垠翔,王琦少,罗智彬,黎俊杰,王青云
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!