机场道面除雪协同作业的编队生成方法、系统和存储介质与流程
本发明涉及民用航空,具体涉及场道面除雪协同作业的编队生成方法、机场道面除雪协同作业的编队仿真系统和存储介质。
背景技术:
1、机场道面的作用是保证飞机在地面的正常活动,这些活动包括飞机的停放、滑行、起飞和着陆等。冬季冰雪气候条件下,机场场道的运行状况直接影响着飞机的运行和安全。
2、机场道面降雪、结冰情况的监测和预警是一项综合性、系统性的工作,涉及到机场所在地区气象信息的收集,机场降雪、结冰信息的采集、预警信息的科学决策与发布,机场道面除冰雪设备的运行管理、方法预案的制定和实施、机场道面除冰雪操作方式等一系列工作。
3、当前,对机场道面降雪、结冰情况,除冰雪作业出动时机,主要依靠人工观察、人工决策,不利于机场除雪作业保障资源的调度,机场除雪资源的利用率低。
技术实现思路
1、有鉴于此,本发明提供了一种场道面除雪协同作业的编队生成方法、机场道面除雪协同作业的编队仿真系统和存储介质,以解决目前存在的不利于机场除雪作业保障资源的调度,机场除雪资源的利用率低的问题。
2、第一方面,本发明提供了一种机场道面除雪协同作业的编队生成方法,包括:
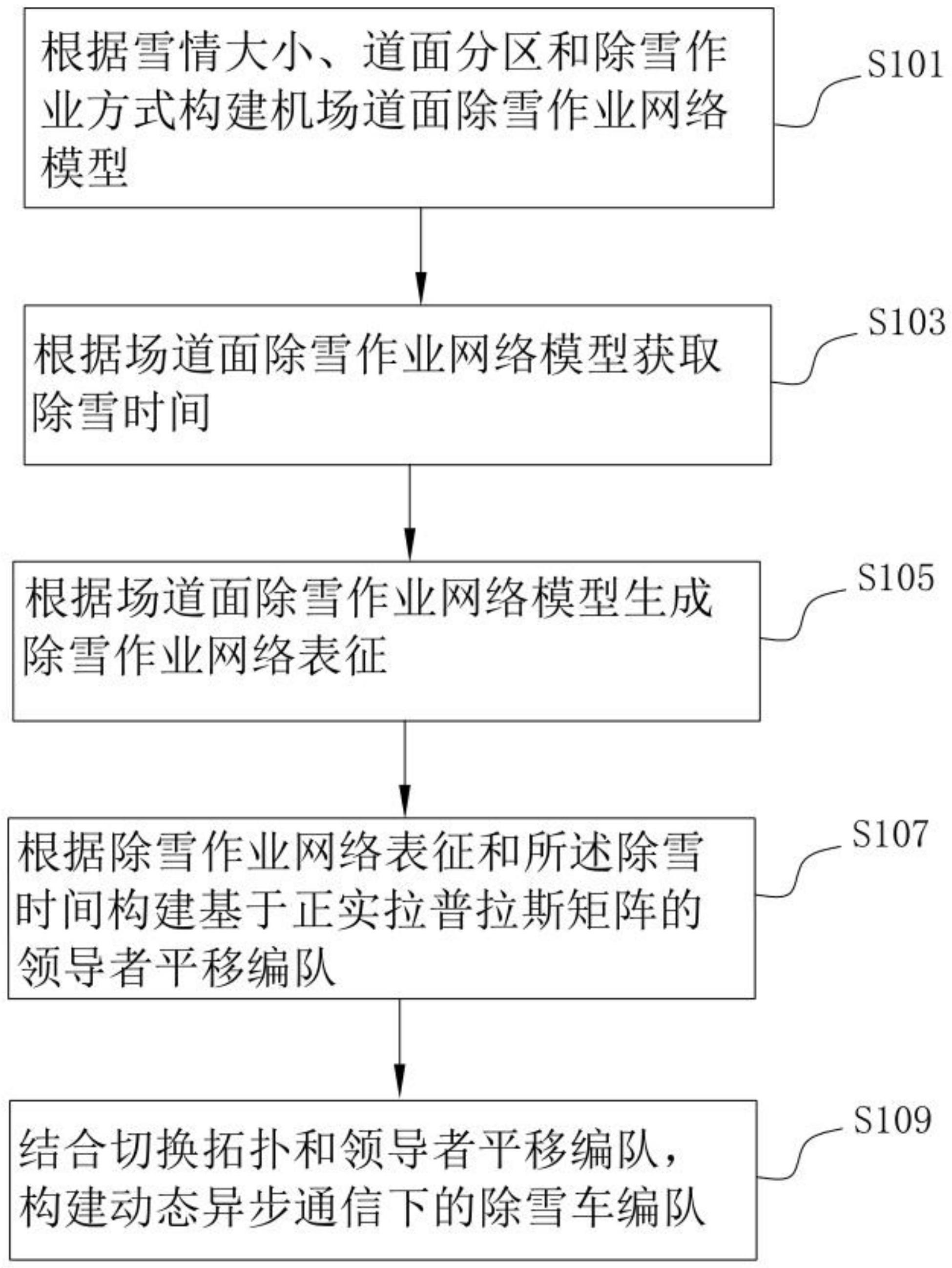
3、根据雪情大小、道面分区和除雪作业方式构建机场道面除雪作业网络模型;
4、根据所述机场道面除雪作业网络模型获取除雪时间;
5、根据所述机场道面除雪作业网络模型生成除雪作业网络表征;
6、根据所述除雪作业网络表征和所述除雪时间构建基于正实拉普拉斯矩阵的领导者平移编队;
7、结合切换拓扑和所述领导者平移编队,构建动态异步通信下的除雪车编队;
8、其中,所述雪情大小包括:小雪、中雪、大雪和冰雪,所述道面分区包括:跑道、滑行道、联络道和停机坪;所述除雪作业方式包括:能量转换除雪、机械除雪、化学试剂除雪和人工清扫,所述除雪车编队包括多种除雪设备:测试车、撒布车、吹雪车、扫雪车、堆雪车和抛雪车。
9、有益效果是,通过结合雪情大小、道面分区和除雪作业方式构建机场道面除雪作业网络模型,然后,在此基础之上给出道面的除雪作业时间规划,实现了在不同的除雪作业方式下的时间计算公式,使得除雪作业时间可预测。根据除雪分区作业生成机场道面除雪作业网络表征,通过设计双层网络实现针对不同道面选取不同的除雪作业方式,加入基于正实拉普拉斯矩阵的领导者平移编队控制决策,提升了除冰雪车辆编队作业协同效率,考虑一种改进的切换拓扑网络下的领导者编队模型,实现了动态异步通信下的编队生成一致性。因此,通过将复杂的机场道面除雪作业通过构建网络模型以及切换拓扑下的编队生成控制,生成除雪群协同编队系统,有助于机场除雪作业保障资源的调度,有效提高机场除雪资源的利用率。
10、在一种可选的实施方式中,根据所述机场道面除雪作业网络模型获取除雪时间,具体包括:针对道面除雪的所述雪情大小提出作业预时间规划,除雪作业时间约束函数满足如下公式:
11、ta=ti+δti,i=1,2,3,4;
12、式中:i为雪情大小,ti为雪情大小i下固定的除雪作业时间,δti为雪情大小i下除雪作业预置保障时间,δti的大小与ti线性相关;ta是由ti加δti组合而成的总除雪时间。
13、有益效果是,通过除雪作业时间函数的设计一定程度上改善了除雪的时效性,保障除雪作业能够在规定保障时间内完成任务。
14、在一种可选的实施方式中,所述固定的除雪作业时间和所述除雪作业预置保障时间的计算公式如下:
15、
16、
17、式中:j为道面分区,w为除雪方式,v、p分别为机械式除雪方式和人工式除雪方式;sj为道面分区j的除雪总面积,wk为除雪设备k的有效作业宽度;vj为道面分区j规定设备除雪作业速度,n为除冰雪车配置数量,为人工式除雪方式p下的单位时间内有效除雪速率,δtjv为道面分区j选取的机械式除雪方式v对应的预留保障时间,δtjp为道面分区j选取的人工式除雪方式p对应的预留保障时间。
18、在一种可选的实施方式中,根据所述机场道面除雪作业网络模型生成除雪作业网络表征,具体包括:
19、获取雪情分区作业网络;
20、获取作业方式选取层网络;
21、对所述雪情分区作业网络和所述作业方式选取层网络相加形成所述除雪作业网络表征。
22、在一种可选的实施方式中,对所述雪情分区作业网络和所述作业方式选取层网络相加形成所述除雪作业网络表征,具体包括:
23、雪情分区作业网络满足如下矩阵:
24、
25、作业方式选取层网络满足如下矩阵:
26、
27、除雪作业网络表征=pij+[swi1,swi2,swi3]或pij+[awi1,awi2,awi3];
28、式中,p为雪情分区作业网络,w为作业方式选取层网络,sw为单一层,aw为组合层。
29、在一种可选的实施方式中,根据所述除雪作业网络表征和所述除雪时间构建基于正实拉普拉斯矩阵的领导者平移编队,具体包括:
30、构建期望队形进行作业;
31、构建除冰雪车二阶动力学平移编队模型如下:
32、
33、
34、式中:x∈rm为除冰雪车所处的位置状态,vi(t)为除冰雪车速度状态,ui(t)为除冰雪车辆控制输入;
35、构建除冰雪车领导者的动力学方程如下式所示:
36、
37、
38、式中:x0∈r2为领导者初始位置状态,v0为领导者初始速度状态;
39、构建除冰雪车跟随者的ui(t)一致性控制如下式所示:
40、
41、式中:aij为跟随者邻接矩阵的正实数权值,bi为智能体i和领导者之间的关联值,xi为当前智能体i的相对坐标,xj为智能体i的邻居智能体j的相对坐标,pji为智能体i与邻居智能体j之间的绝对位置,p0i为智能体i与领导者之间的绝对位置;当智能体i接收领导者信息,则bi=1.5,否则为0;ni(g)为拓扑图g中智能体i的入邻居集合,γ是一个正实数增益;
42、领导者平移编队的总体运行公式如下:
43、在一种可选的实施方式中,结合切换拓扑和所述领导者平移编队,构建动态异步通信下的除雪车编队,具体包括:
44、构建动态异步拓扑网络;
45、根据动态异步拓扑网络构建[gx,g(vi)]切换拓扑,其中,gx为固定拓扑,g(vi)表示跟随者切换速度拓扑集合;
46、根据[gx,g(vi)]切换拓扑构建领导者跟随者控制器。
47、在一种可选的实施方式中,根据[gx,g(vi)]切换拓扑构建领导者跟随者控制器,具体包括:
48、建立集合gv(t)={g(v1),g(v2),…,g(vn)},n≥2,其中,用ti表示第i个周期,在每个周期内平均划分时长进行g(vi)的切换;
49、在切换周期ti内划分指定的n个区间,每个区间上按顺序采用[gx,g(v1)]→[gx,g(v2)]→…→[gx,g(vn)]的n种组合切换拓扑;
50、跟随者总体控制满足如下:
51、
52、式中,为在t时刻位置拓扑的跟随者邻接矩阵的正实数权值,为在t时刻速度拓扑的邻接矩阵的正实数权值,bi为智能体i和领导者之间的关联,ni(g)为扑图g中智能体i的入邻居集合;拓扑连接形式可采取有向、无向、混合。
53、有益效果是,通过对机场道面的除雪群通信网络进行切换拓扑设计,实现了在动态的切换拓扑下除雪编队控制的一致性,一定程度上改善了除雪作业效率。
54、第二方面,本发明还提供了一种机场道面除雪协同作业的编队仿真系统,根据任一项所述的机场道面除雪协同作业的编队生成方法搭建机场道面除雪协同编队仿真系统。
55、由于上述的机场道面除雪协同作业的编队仿真系统是基于机场道面除雪协同作业的编队生成方法而搭建的,因此,使得该机场道面除雪协同作业的编队仿真系统具有机场道面除雪协同作业的编队生成方法的一切有益效果。
56、第三方面,本发明提供了一种存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现任一项所述的机场道面除雪协同作业的编队生成方法的步骤。
57、由于上述的存储介质可实现上述的基于机场道面除雪协同作业的编队生成方法,因此,使得该存储介质具有机场道面除雪协同作业的编队生成方法的一切有益效果。
- 还没有人留言评论。精彩留言会获得点赞!