一种仓储用自动搬运小车的控制方法和系统与流程
本发明涉及自动搬运小车,特别涉及一种仓储用自动搬运小车的控制方法和系统。
背景技术:
1、智能化仓储系统是伴随着智能制造而诞生的一种以人工智能技术为基础建立的新型自动化仓储系统,其特点是运转效率高、人力成本低、自动化程度高。在智能化仓储系统中会引入无人驾驶搬运车来辅助货物的搬运。智能无人搬运车又称agv(automaticguided vehicle)小车,其具有智能化高、灵活度高、集成度高等特点。由于任务量和无人驾驶搬运车的数量通常不只一个,因此,如何对无人驾驶搬运车进行有效控制,实现快速、高效的货物搬运,是本领域技术人员需要解决的技术问题。
技术实现思路
1、本发明提供了一种仓储用自动搬运小车的控制方法和系统,实现对搬运任务和小车运行的自动化控制与调度,提高了仓储物流的效率和可靠性。
2、本发明提出的一种仓储用自动搬运小车的控制方法,所述方法包括:
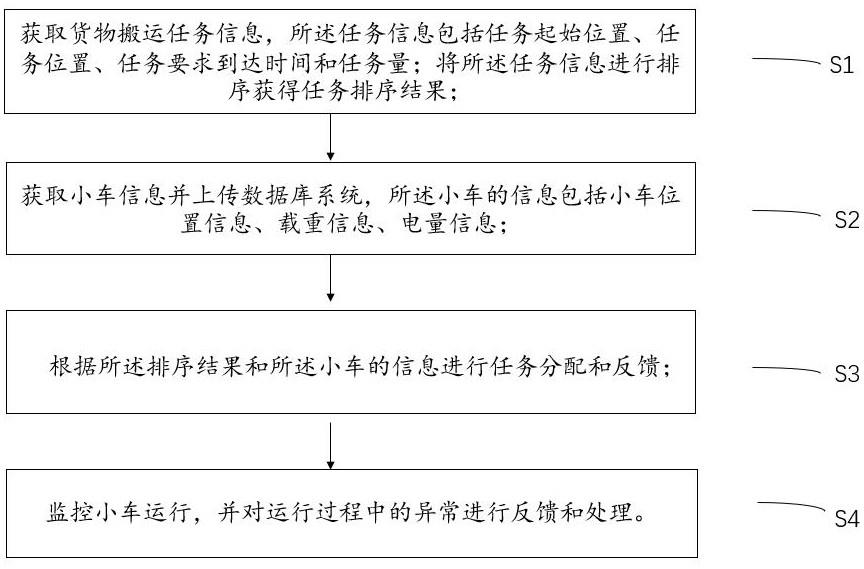
3、s1、获取货物搬运任务信息,所述任务信息包括任务起始位置、任务位置、任务要求到达时间和任务量;将所述任务信息进行排序获得任务排序结果;
4、s2、获取小车信息并上传数据库系统,所述小车的信息包括小车位置信息、载重信息、电量信息;
5、s3、根据所述排序结果和所述小车的信息进行任务分配和反馈;
6、s4、监控小车运行,并对运行过程中的异常进行反馈和处理。
7、进一步的,一种仓储用自动搬运小车的控制方法,所述方法包括:
8、通过厂区二维平面图获得仓储位置信息和每个站点的位置和位置编号;
9、通过站点需求获取任务信息;所述任务信息包括任务起始位置、任务位置、任务要求到达时间和任务量;
10、将任务信息进行排序获取任务的优先级。
11、进一步的,一种仓储用自动搬运小车的控制方法,所述将任务信息进行排序获取任务的优先级,包括:
12、根据任务的站点位置,获取同样站点的历史任务的平均送达时长;其中,任务起始位置同为某一仓库;
13、将任务排序时间和任务要求的到达时间差与所述平均送达时长对比,获取时间盈余;所述平均送达时间包括装卸货时间和行车时间;
14、根据时间盈余长短进行排序,获得第一任务排序结果;
15、同样的时间盈余下,按照任务重要程度排序,获得第二任务排序结果;
16、将第一排序结果和第二排序结果结合,获得最终的任务排序结果;
17、如果在排序结束后一定时间内有新任务加入,则重新进行排序;如果超过所述一定时间有新任务加入,则将去除已开始任务,将剩余任务重新进行排序;
18、所述一定时间为5+dt,单位为分钟;dt 为系统延迟时间和任务分配时间之和。
19、进一步的一种仓储用自动搬运小车的控制方法,所述方法包括:
20、通过初始配置获取小车的编号,最大载重信息,电池续航能力并存储至数据库系统;
21、通过小车的定位系统获取小车的位置信息并上传至数据库系统;所述定位系统包括激光传感器,雷达传感器;
22、通过重力感应系统获取小车的实际载重信息并上传至数据库系统;
23、通过速度传感器获取小车的行车速度并上传至数据库系统;
24、控制系统通过调用所述数据库系统数据对小车进行控制。
25、进一步的,一种仓储用自动搬运小车的控制方法,所述方法包括:
26、s31、根据小车当前的位置信息和电量信息;计算各个小车执行下一次任务开始的时间;根据下一次任务可以开始时间,对小车进行排序,最先可以执行下次任务的小车为第一小车;
27、s32、根据最终任务排序结果,获取排在第一的任务作为第一任务,所述第一任务的任务量为第一任务量q1;
28、s33、将所述第一任务量q1与所述第一小车的最大载重量n1相比;
29、s331、如果q1<n1; 则将所述第一小车执行下一次任务开始的时间作为所述第一任务执行开始时间,将此执行开始时间加上平均送达时间,与所述第一任务要求的到达时间对比获得第二时间盈余:
30、s3311、如果将此执行开始时间加上同样站点的历史任务平均送达时间早于任务要求的送达时间点8分钟以内或者等于任务要求的送达时间;则将所述第一任务直接分配给第一小车;
31、s3312、如果将此执行开始时间加上同样站点的历史任务平均送达时间早于任务要求的送达时间点8分钟或以外,即第二时间盈余大于8分钟;则将n1- q1与排在第i位的任务量q2对比,并且根据第i任务点与第一任务点的距离和车辆平均速度,获取第二行车时间;如果n1- q1≥q2; 并且第二行车时间小于或等于第二时间盈余;为第i任务装卸货时间,同时满足第i任务的要求送达时间,则将第一第i任务同时分配给第一小车,如果任何一项不满足,则只将第一任务分配给第一小车;
32、s3313、如果将此执行开始时间加上同样站点的历史任务平均送达时间晚于任务要求的送达时间;则将所述第一任务直接分配给第一小车的同时发送反馈给需求站点;
33、s332、如果q1>n1; 则先将所述第一任务n1的载重量分配给第一小车;并将q1-n1与第二小车的载重量n2对比;如果q1-n1≤n2,则按照s3311~ s3313同样的对比和分配原则进行对比和分配;
34、s333、如果q1-n1>n2; 则将第一任务n2的载重量分配给第二小车;并按照s332同样的规则进行比较和分配,直到安排完第一任务;
35、s34、按照任务排序和s32~s33同样的分配原则分配任务,直到所有的可用小车安排满或者任务分配完成。
36、进一步的,一种仓储用自动搬运小车的控制方法,所述s4包括:
37、控制系统通过对小车的位置信息实时进行监控;
38、对运行过程中的风险和异常进行处理;所述风险包括,因为遇到障碍物耽搁不能按时送达风险和两辆小车相向碰撞风险;
39、对于不能按时送达风险,路况好的地方提高车速;
40、对于两辆小车相向碰撞风险,控制系统根据行车速度和距离,对其中一辆小车进行刹车和避让。
41、进一步的,一种仓储用自动搬运小车的控制方法,所述对于两辆小车相向碰撞风险,控制系统根据行车速度和距离,对其中一辆小车进行刹车和避让;包括:
42、如果两辆小车有碰撞风险,则根据实际载重量原则和送达时间原则选择小车进行刹车和避让;
43、如果两辆小车实际载重量差别在大于10%;则选择载重轻的车进行刹车和避让;如果两辆小车实际载重量差别在小于等于10%;则选择距离送达时间盈余多的车进行刹车和避让;其中在两辆车距离l时开始刹车;l满足以下条件:
44、l1+(+)×(2 +)≤l≤ l1+(+)×(2+2)
45、t2=
46、其中,l1为两辆车安全距离;;信号传输延迟时间;为避让小车转弯避让时间;和为两小车的行驶速度;d为避让小车的轴距,为最小转向角度,为最小转弯速度。
47、本发明提出一种仓储用自动搬运小车的控制系统,所述系统包括:
48、任务获取模块:获取货物搬运任务信息,所述任务信息包括任务起始位置、任务位置、任务要求到达时间和任务量;将所述任务信息进行排序获得任务排序结果;
49、小车信息获取模块:获取小车信息并上传数据库系统,所述小车的信息包括小车位置信息、载重信息、电量信息;
50、任务分配模块:根据所述排序结果和所述小车的信息进行任务分配和反馈;
51、控制模块:监控小车运行,并对运行过程中的异常进行反馈和处理。
52、本发明有益效果:通过本发明提出的一种仓储用自动搬运小车的控制方法和系统,根据排序结果,优先安排小车处理紧急或重要的任务,确保任务能够按时完成并提高仓储物流的效率;确保系统具备准确的小车信息,能够基于小车的状态和能力进行任务分配和调度,提高任务执行的效率和准确性,确保任务被分配给能够最快、最有效地完成任务的小车,提高任务执行效率和物流运输效果;监控小车运行并处理异常情况:实时监控小车的运行情况,对小车运行过程中的异常情况及时进行反馈和处理;保障小车运行的稳定性和安全性,提高仓储操作的可靠性和效率;这种仓储用自动搬运小车的控制方法通过任务排序、小车信息获取与上传、任务分配与反馈以及运行监控与异常处理等步骤,实现了对搬运任务和小车运行的自动化控制与调度,提高了仓储物流的效率和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!