AGV小车导航控制方法及系统与流程
本发明涉及导航,特别是agv小车导航控制方法及系统。
背景技术:
1、agv(automatic guided vehicle,自动导航小车)是一种无人操纵的自动化运输设备,能承载一定的重量在出发地和目的地之间自主运行,是自动物流系统和柔性制造系统的重要组成设备,具有良好的市场前景和应用价值。
2、agv分为轨道式agv和非轨道式agv,其中轨道式agv为按照预设轨道移动的agv设备,而非轨道式agv为具有自主导航功能的agv设备,现有的非轨道式agv常见的导航方式为通过固定设置在其上的激光雷达导航仪对所在空间的环境轮廓进行扫描并分析得出环境数据,然后agv根据环境数据进行导航移动,但在参照点少的狭窄地方仅靠单个激光雷达导航仪扫描环境轮廓,得出的环境数据容易出现偏差,导致agv无法正常导航,另外,由于上述激光雷达导航仪是固定设置的,若该激光雷达导航仪被处于高位的障碍物遮挡,则激光雷达导航仪无法扫描所在空间的环境轮廓,也导致agv无法正常导航;若设置多个激光雷达导航仪以扫描获得多个角度的环境轮廓以克服上述的技术问题,又会提高agv设备的生产成本。
3、中国专利申请号cn201510761432.9公开了一种视觉agv导航系统,包括:视觉传感器、图像采集卡、图像处理器、pc主机和驱动系统,其中:所述视觉传感器通过usb接口与所述图像采集卡相连接,所述图像采集卡与所述图像处理器相连接,所述图像处理器通过rs232接口、usb接口和jtag接口与所述pc主机相连接,所述图像处理器通过pwm输出接口与所述驱动系统相连接;所述图像处理器包括依次连接的滤波处理单元、边缘处理单元和阈值处理单元。虽然该导航系统能够实现avg的自动导航,但是整个算法复杂,耗时长。
4、因此,亟需一种应用于非轨道式agv的成本低廉且稳定可靠的定位导航方法。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种agv小车导航控制方法及系统。
2、为达到上述目的,本发明是按照以下技术方案实施的:
3、本发明的第一个目的是要提供一种agv小车导航控制方法,包括以下步骤:
4、s1、绘制室内坐标网格图,并在坐标网格图中标记出所有障碍物的位置及坐标;
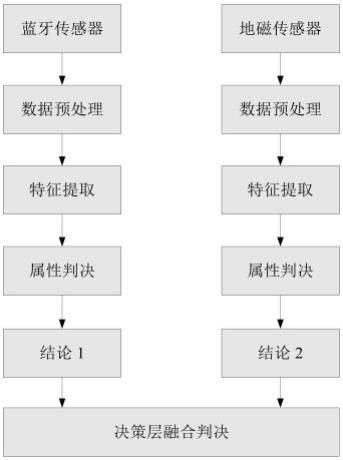
5、s2、在室内区域设置若干蓝牙信标,并在agv小车上安装蓝牙接收器以及ibeacon软件和霍尔传感器分别接收蓝牙和地磁信号,并计算出蓝牙估计坐标和地磁估计坐标;
6、s3、之后对蓝牙估计坐标和地磁估计坐标在决策层进行融合计算agv小车的当前位置;
7、s4、获得agv小车待到达位置的坐标,然后根据公式求得agv小车的当前位置与agv小车待到达位置的最短直线距离,并控制agv小车沿着该最短直线距离向agv小车待到达位置移动;
8、s5、通过agv小车上的视觉传感器实时采集agv小车前方道路图像;
9、s6、当发现agv小车正前方存在障碍物时控制agv小车向左或向右移动,并实时采集agv小车前方道路图像直至agv小车正前方无障碍物;再次获得agv小车的当前位置的坐标并求得agv小车的当前位置与agv小车待到达位置的最短直线距离,并控制agv小车沿着该最短直线距离向agv小车待到达位置移动;
10、s7、重复步骤s5-s6,直到agv小车到达agv小车待到达位置。
11、进一步地,所述步骤s2具体包括:假设蓝牙估计坐标为:;在此期间地磁估计坐标集合为:;地磁估计坐标集合取平均加权后坐标为:;对坐标分别赋予权值和 b,得到融合后的最终位置估计坐标为:;其中: <b。
12、进一步地,所述蓝牙和地磁定位结果的权值比例置为1: n,即:;最终将融合后的最终位置估计坐标写为:。
13、本发明的第二个目的是要提供一种agv小车导航控制系统,包括在室内区域设置若干蓝牙信标、安装在agv小车上agv小车处理器、安装在agv小车处理器上的蓝牙接收器以及ibeacon软件和霍尔传感器、视觉传感器和驱动系统,其中:所述视觉传感器通过usb接口与agv小车处理器相连接,所述视觉传感器通过pwm输出接口与所述驱动系统相连接;所述agv小车处理器用于执行所述agv小车导航控制方法。
14、与现有技术相比,本发明首先通过对蓝牙估计坐标和地磁估计坐标在决策层进行融合计算agv小车的位置,既减小了定位误差又没有耗费额外的硬件资源;然后重复计算agv小车的当前位置与agv小车待到达位置的最短直线距离,直到到达agv小车待到达位置,整个过程算法简单,耗时短,对硬件要求较低,可以很好地满足实际应用的需要。
技术特征:
1.一种agv小车导航控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的agv小车导航控制方法,其特征在于,所述步骤s1具体包括:
3.根据权利要求1所述的agv小车导航控制方法,其特征在于,所述步骤s2具体包括:
4.根据权利要求3所述的agv小车导航控制方法,其特征在于,所述蓝牙和地磁定位结果的权值比例置为1: n,即:;最终将融合后的最终位置估计坐标写为:。
5.一种agv小车导航控制系统,其特征在于,包括在室内区域设置若干蓝牙信标、安装在agv小车上agv小车处理器、安装在agv小车处理器上的蓝牙接收器以及ibeacon软件和霍尔传感器、视觉传感器和驱动系统,其中:所述视觉传感器通过usb接口与agv小车处理器相连接,所述视觉传感器通过pwm输出接口与所述驱动系统相连接;所述agv小车处理器用于执行如权利要求1-4任一所述的agv小车导航控制方法。
技术总结
本发明公开了一种AGV小车导航控制方法及系统,本发明首先通过对蓝牙估计坐标和地磁估计坐标在决策层进行融合计算AGV小车的位置,既减小了定位误差又没有耗费额外的硬件资源;然后重复计算AGV小车的当前位置与AGV小车待到达位置的最短直线距离,直到到达AGV小车待到达位置,整个过程算法简单,耗时短,对硬件要求较低,可以很好地满足实际应用的需要。
技术研发人员:孙文军,王欣
受保护的技术使用者:深圳大工人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!