一种基于扰动观测的事件触发切换控制的污水处理方法
本发明属于自动化技术与现代控制领域,尤其是涉及一种基于扰动观测的事件触发切换控制的污水处理方法。
背景技术:
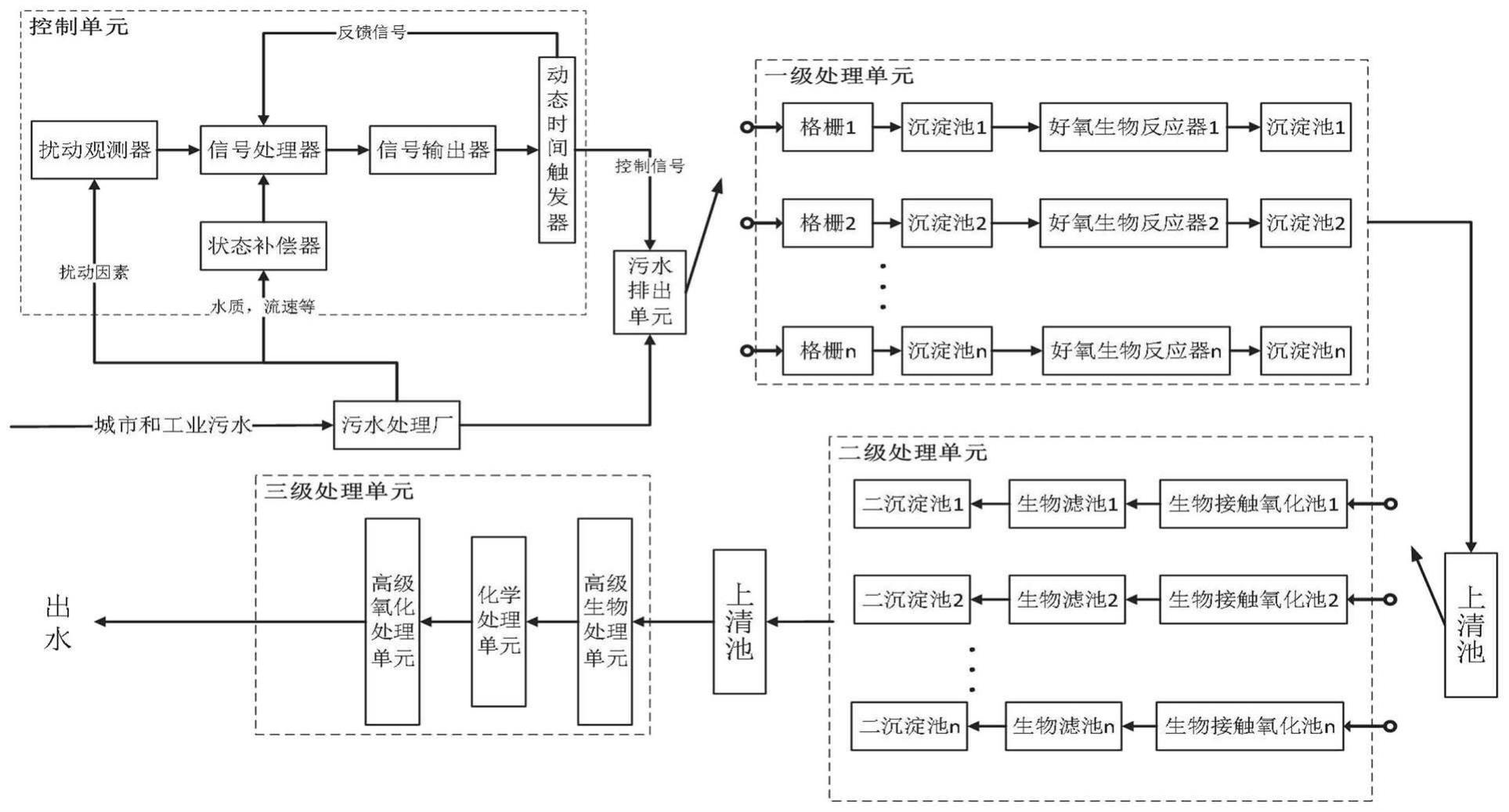
1、近年来,随着中国基础设施的日益完善,我国城市化和工业化进程已经达到世界领先水平,是全球经济可持续发展的重要支撑。然而,这种高速发展不可避免地伴随着巨大的环境挑战。这些新兴城市和大规模工厂每天都会排放大量污水,不仅直接导致自然水系严重污染,也迫使生态圈加剧退化。值得注意的是,水污染不仅对人类健康造成威胁,还会对水生生物、生态系统和可持续发展产生负面影响。一般而言,污水中的有机物、重金属、氮、磷等物质会造成水体营养过剩、水生态系统紊乱等问题,这是导致水生生物死亡进而迫使生态圈加剧退化的直接原因。为了降低水污染这种阻碍可持续化发展的问题的影响,最近,多地开始加大建设污水处理厂的财政投入以尽可能降低污水对生态环境的负面影响。然而,由于污水处理技术相对落后的限制以及随着城市化和工业化规模的日益增大,现代污水处理工艺面临着一系列挑战。比如,部分污水处理厂在设计和运行中存在不合理和不完善之处,导致污水处理效果不佳,运行效率低下;同时,现有的污水处理厂缺乏优化管理和控制手段,无法充分利用设备的潜在价值,难以实现其最佳性能;此外在污水排放到污水处理的过程中,考虑到不同时段、不同季节的污水流量不固定,以及污水管道长期不间断的使用可能会导致其老化、阻塞破损等,这些问题都会对实际污水排放到处理等一系列流程带来外部干扰。所以,亟需一种基于扰动观测的事件触发切换控制的污水处理方法来提高污水处理系统的收益和效率,减少人为干预与资源浪费,保证污水处理系统的高效运转。
技术实现思路
1、本发明的目的是提供一种基于扰动观测的事件触发切换控制的污水处理方法,解决上述技术存在的实际污水处理系统受到堵塞或管道破裂等扰动因素的影响造成一些系统状态不可测、污水处理效果不佳、运行效率低下的问题。
2、为实现上述目的,本发明提供一种基于扰动观测的事件触发切换控制的污水处理方法,包括以下步骤:
3、步骤1、建立污水处理系统的正切换系统状态空间模型;
4、步骤2、建立污水处理系统的扰动观测器;
5、步骤3、设计系统的状态补偿器;
6、步骤4、设计控制器和动态事件触发策略;
7、步骤5、构建污水处理系统闭环控制系统;
8、步骤6、设计污水处理系统平稳运行的条件;
9、步骤7、验证系统的正性和稳定性;
10、步骤8、构建基于状态补偿的非单调的动态事件触发策略。
11、优选的,步骤1中建立污水处理系统的正切换系统状态空间模型的具体方法如下:
12、
13、y(t)=cσ(t)x(t)+dσ(t)w(t),
14、其中,x(t)∈rs,u(t)∈ro,和y(t)∈rr分别为污水处理系统的系统状态、控制输入、外部扰动输入和系统输出,分别表示n维向量、n维非负向量和n×n维欧氏矩阵空间,函数σ(t)代表切换律,并从有限集合n∈r+中取值;假定aσ(t)是metzler矩阵,bσ(t)≥0,cσ(t)≥0,dσ(t)≥0,eσ(t)≥0,当时,定义系统矩阵为ap,bp,cp,dp,ep,为污水处理系统的系统状态的导数。
15、优选的,步骤2中建立污水处理系统的扰动观测器的构建形式如下:
16、2.1定义外部扰动系统为
17、
18、w(t)=γσ(t)ξ(t),
19、其中,是扰动系统的状态,hσ(t)∈rr×r是metzler矩阵,γσ(t)≥0表示外部扰动系统的增益矩阵,γσ(t)∈rr×r;
20、2.3设计污水处理系统的扰动观测器为
21、
22、其中,是扰动观测器的状态,fσ(t)∈rr×s是扰动观测器增益矩阵,具体设计形式为:
23、
24、在上述矩阵中,是s维列向量,表示第i个元素全是1其他元素全是0的r维行向量,表示全是1的r维列向量,表示rr向量。
25、优选的,步骤3中设计系统的状态补偿器的具体过程如下:
26、
27、其中,是系统的状态补偿,gσ(t)∈rs×s,lσ(t)∈rs×r是状态补偿器的增益矩阵,具体设计形式为:
28、
29、
30、在上述矩阵中,和lp(i)均是s维列向量,表示第i个元素全是1其他元素全是0的s维行向量,δ1表示一个大于零的常数,表示rs向量。
31、优选的,步骤4中设计控制器和动态事件触发策略,具体方法如下:
32、4.1设计污水处理系统的控制器为
33、
34、其中,是状态补偿在事件触发时刻tm的状态值,t∈[tm,tm+1),tm和tm+1是连续的事件触发的时间点;k1σ(t)、k2σ(t)、k3σ(t)是控制器增益矩阵,具体设计形式为:
35、
36、在设计的增益矩阵中,是s维列向量,和均是r维列向量,表示系统矩阵bp的转置,v1(p)表示rs向量;
37、4.2构建基于状态补偿的单调的动态事件触发策略:定义误差则事件触发条件为
38、
39、其中,是事件触发函数,且自适应触发率ψ(t)的初值ψ(0)满足为常数,并且||·||1表示向量中的所有元素的绝对值之和,即1范数,eξ(t)表示污水处理系统中的扰动观测器状态和扰动之差,表示扰动观测器的状态,ξ(t)表示污水处理系统中的扰动,表示在补偿状态时的触发与补偿状态之差,表示污水处理系统的补偿状态。
40、优选的,步骤5中构建污水处理系统闭环控制系统的具体过程如下:
41、在步骤2扰动观测器、步骤3状态补偿器和步骤4.1中的控制器下,步骤1的污水处理控制系统的闭环系统表示如下:
42、
43、
44、
45、其中,表示在补偿状态时的触发与补偿状态之差。
46、优选的,步骤6中设计污水处理系统平稳运行的条件如下:
47、设计常数δ1>0,δ2>0,δ3>0,μ>0,λ>0,α>0,rs向量和rr向量使得
48、
49、
50、
51、
52、
53、
54、
55、
56、
57、
58、
59、
60、v(p)≤λv(q),
61、对任意的p≠q成立,那么
62、
63、且扰动观测器和状态补偿器均是正的,污水处理系统是稳定的,平均驻留时间条件为其中表示q×q维全是常数的矩阵,表示外部扰动系统的增益矩阵γp的转置,表示第i个元素全是1其他元素全是0的r维行向量,λ,μ均表示一种大于零的常数。
64、优选的,步骤7中验证系统的正性和稳定性的具体过程如下:
65、7.1a由步骤2、3、4中设计的增益矩阵和步骤6中的等式约束条件可知
66、bpk2p+ep+bpk3pdp=0,lpdp=0。
67、7.2a进一步地,根据步骤4.2的动态事件触发条件,将步骤5中污水处理系统的闭环控制系统表示为
68、
69、7.3a结合步骤2、3、4中的增益矩阵和步骤6中的正性约束条件有:
70、
71、
72、和进一步可得ap+bpk3pcp、gp和hp均为metzler矩阵,lpcp、bpk2pγp、fp和均为正矩阵;
73、7.4a对于给定的非负初值x(0)、和eξ(0),根据步骤7.2a中的闭环系统和步骤7.3a的正性证明推出x(t)≥0,和eξ(t)≥0,得到步骤5中的污水处理系统闭环矩阵是正的;
74、系统的稳定性验证过程如下:
75、7.1b选择线性余正李雅普诺夫函数为
76、
77、其中,对于给定的切换序列0≤t0≤t1≤…≤tm≤t,t∈[tm,tm+1),m∈n;
78、7.2b根据动态事件触发策略,将步骤5中的闭环控制系统表示为
79、
80、7.3b根据步骤7.2b中的闭环控制系统得到
81、
82、7.4b由系统的增益矩阵和步骤6中的约束条件可得到不等式:
83、
84、
85、7.5b根据步骤6中的稳定性约束条件和步骤7.4b得出下列五个不等式:
86、
87、
88、
89、
90、
91、7.6b结合步骤7.3b、步骤7.5b和线性余正李雅普诺夫函数推出
92、
93、7.7b对步骤7.6b两边同时积分可知
94、
95、7.8b结合步骤7.7b和步骤7.1b中的李雅普诺夫函数切换条件可得
96、
97、其中,利用步骤6中平均驻留时间条件可知:因此,污水处理系统在设计的动态事件触发器下是指数稳定的。
98、优选的,步骤8中在步骤4.2的事件触发构建基于状态补偿的非单调的动态事件触发策略具体如下:
99、对于触发条件是事件触发函数,且
100、
101、其中,自适应触发率ψ(t)的初值ψ(0)满足ψ(0)≥0,并且表示大于零小于1的常数,η>0和初值||·||1表示向量中的所有元素的绝对值之和,即1范数,et表示e的t次幂。
102、因此,本发明采用上述一种基于扰动观测的事件触发切换控制的污水处理方法,具有以下有益效果:
103、(1)在污水处理系统中使用状态补偿器和扰动观测器,不但可以观测到污水流量的实时数据,也可以在得到稳定污水处理达标率的情况下进一步降低成本;
104、(2)构造的基于状态补偿器的动态事件触发策略,可以根据系统中的状态补偿的变化来设计触发条件,不仅可以保证污水流量的负荷和时间平衡,也可以降低由于人工干预和调整滞后等因素造成的资源浪费。
105、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!