一种重载无人系统实验验证系统的横纵向协调控制的方法
本发明涉及车辆协调控制领域,尤其涉及一种重载无人系统实验验证系统的横纵向协调控制的方法。
背景技术:
1、轨迹跟踪作为自动驾驶的关键问题,是智能汽车领域的研究重点。目前采用的方法主要有pid控制、模糊控制、滑模控制、鲁棒控制和模型预测控制等,但上述对于车辆轨迹跟踪方面大多只是针对于横向控制研究,对于横纵向协调控制的研究较少。然而,在实际的行驶车辆中横纵向控制之间存在一定联系,单独的横向控制仿真效果不错,但在实车试验的过程中存在冲出轨迹等问题,其原因在于并没有考虑到纵向控制对于整个轨迹跟踪的影响。
技术实现思路
1、有鉴于此,为了解决现有轨迹跟踪控制方法中只考虑了横向控制,进而导致实验试验过程中控制不精准的技术问题,本发明提出一种重载无人系统实验验证系统的横纵向协调控制的方法,所述方法包括以下步骤:
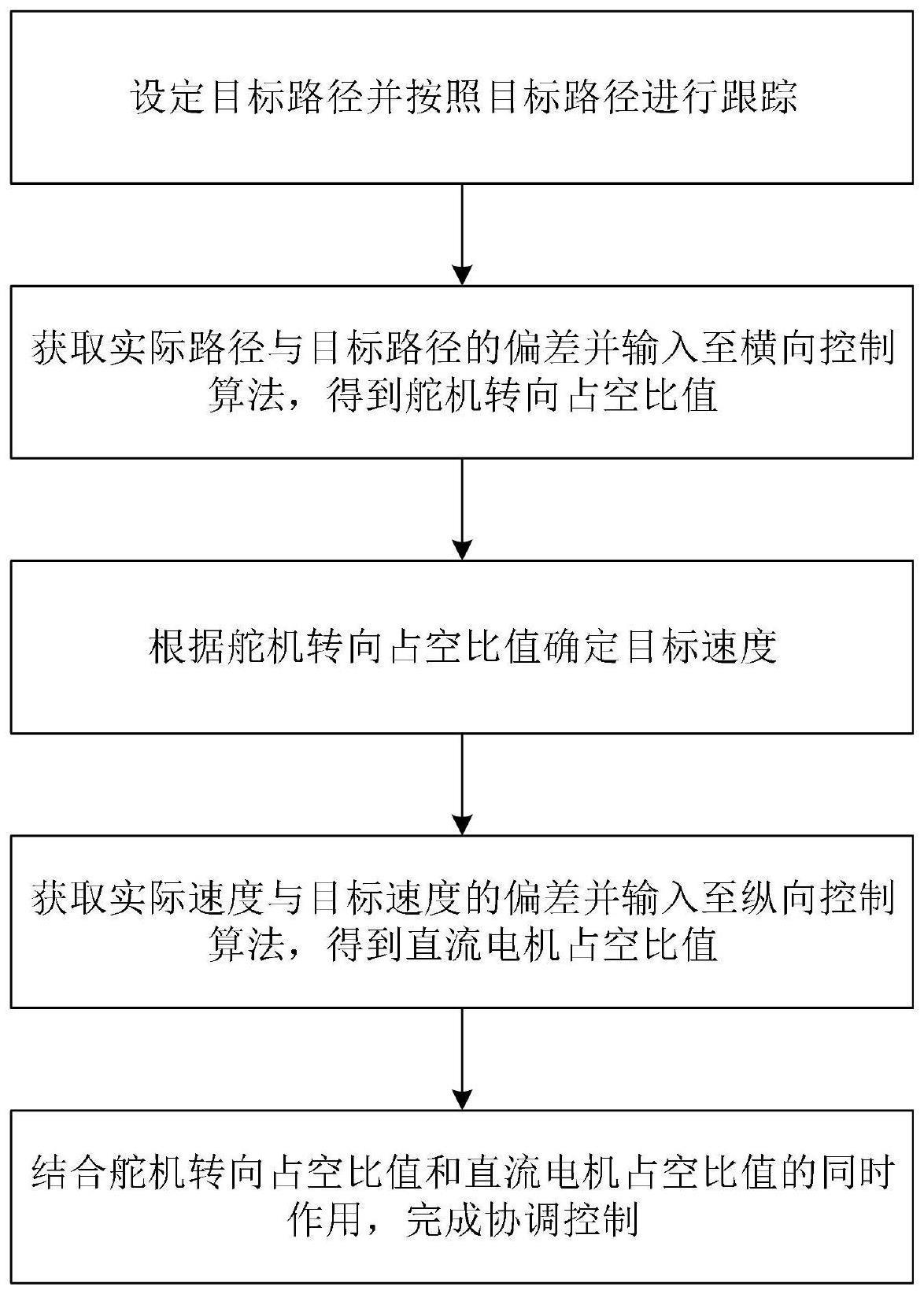
2、设定目标路径并按照目标路径进行跟踪;
3、获取实际路径与目标路径的偏差并输入至横向控制算法,得到舵机转向占空比值;
4、根据舵机转向占空比值确定目标速度;
5、获取实际速度与目标速度的偏差并输入至纵向控制算法,得到直流电机占空比值;
6、结合舵机转向占空比值和直流电机占空比值的同时作用,完成协调控制。
7、在一些实施例中,所述设定目标路径并按照目标路径进行跟踪这一步骤,其具体包括:
8、基于电磁信号发生器铺设车辆运行轨道,得到目标路径;
9、所述车辆运行轨道的弧形轨迹的转弯角度小于等于车辆的最大转向角度;
10、控制重载车辆按照目标路径进行跟踪。
11、通过该优选步骤,设定简单的运行轨道作为重载车辆的目标路径,用于后续的车辆跟踪控制。
12、在一些实施例中,所述横向控制算法为模糊pid控制算法。
13、通过该优选步骤,根据重载车实车采用传统pid控制跟踪的效果来看,最终选用模糊pid控制算法。
14、在一些实施例中,所述横向控制算法将实际路径与目标路径的偏差、偏差变化率以及模糊过程的输出作为pid控制算法的三个参数的修正因子,其模糊集合均定义为{负大,负中,负小,零,正小,正中,正大},用模糊语言表达为{nb,nm,ns,zo,ps,pm,pb},实际路径与目标路径的偏差的和域为{-3,3},δkp的论域设定为{-10,10},δki的论域设定为{-0.05,0.05},δkd的论域设定为{-0.1,0.1}。
15、在一些实施例中,所述根据舵机转向占空比值确定目标速度这一步骤,其具体包括:
16、根据线性关系,确定转向角度与舵机占空比的关系式;
17、构建转向角度与目标速度的关系式;
18、基于转向角度与舵机占空比的关系式、转向角度与目标速度的关系式,确定目标速度。
19、通过该优选步骤,先分别构建出转向角度与舵机占空比的关系式、转向角度与目标速度的关系式,进而可以基于这两条关系式,根据舵机转向占空比值确定目标速度。
20、在一些实施例中,所述转向角度与舵机占空比的关系式这一步骤,其具体包括:
21、θturn=(pwmd-pwm(0,d))k1
22、上式中,θturn代表转向角度,pwmd表示舵机占空比值,pwm(0,d)表示车辆方向摆正时对应舵机0°占空比值。
23、在一些实施例中,所述转向角度与目标速度的关系式的表达式如下:
24、vt=pwme+(θs.m-θturn)k2
25、s.t.
26、vt≤pwme,full
27、0≤pwme≤pwme,full
28、上式中,pwme表示电机较高转速占空比值,θs.m表示车辆直线行驶最大舵机转角,k2表示预设系数,pwme,full表示电机满占空比值,θturn表示转向角度。
29、基于上述方案,本发明提供了一种重载无人系统实验验证系统的横纵向协调控制的方法,利用模糊pid控制来提高横向控制的精度,在横向控制的基础上,加入纵向控制,通过横向控制的输出获取实际道路的信息,进而确定目标速度,共同作用于智能车,以此来提高车辆行驶的稳定性和快速性。使得车辆能够适应各种不同的轨迹。
技术特征:
1.一种重载无人系统实验验证系统的横纵向协调控制的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种重载无人系统实验验证系统的横纵向协调控制的方法,其特征在于,所述设定目标路径并按照目标路径进行跟踪这一步骤,其具体包括:
3.根据权利要求2所述一种重载无人系统实验验证系统的横纵向协调控制的方法,其特征在于,所述横向控制算法为模糊pid控制算法。
4.根据权利要求3所述一种重载无人系统实验验证系统的横纵向协调控制的方法,其特征在于,所述横向控制算法将实际路径与目标路径的偏差、偏差变化率以及模糊过程的输出作为pid控制算法的三个参数的修正因子,其模糊集合均定义为{负大,负中,负小,零,正小,正中,正大},用模糊语言表达为{nb,nm,ns,zo,ps,pm,pb},实际路径与目标路径的偏差的和域为{-3,3}。
5.根据权利要求2所述一种重载无人系统实验验证系统的横纵向协调控制的方法,其特征在于,所述根据舵机转向占空比值确定目标速度这一步骤,其具体包括:
6.根据权利要求5所述一种重载无人系统实验验证系统的横纵向协调控制的方法,其特征在于,所述转向角度与舵机占空比的关系式这一步骤,其具体包括:
7.根据权利要求5所述一种重载无人系统实验验证系统的横纵向协调控制的方法,其特征在于,所述转向角度与目标速度的关系式的表达式如下:
技术总结
本发明公开了一种重载无人系统实验验证系统的横纵向协调控制的方法,该方法包括:设定目标路径并按照目标路径进行跟踪;获取实际路径与目标路径的偏差并输入至横向控制算法,得到舵机转向占空比值;根据舵机转向占空比值确定目标速度;获取实际速度与目标速度的偏差并输入至纵向控制算法,得到直流电机占空比值;结合舵机转向占空比值和直流电机占空比值的同时作用,完成协调控制。通过使用本发明,在横向控制的基础上,加入纵向控制,共同作用于智能车,以此来提高车辆行驶的稳定性和快速性。本发明可广泛应用于车辆协调控制领域。
技术研发人员:王萍,刘万泉,胡天江,韩瑜,林文龙
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!