一种自动驾驶车辆下线功能自动点检方法及装置与流程
本申请涉及车辆测试,具体涉及一种自动驾驶车辆下线功能自动点检方法及装置。
背景技术:
1、现阶段,智能驾驶汽车的功能正常运行往往涉及许多传感器、运算处理单元、执行器的交互。自动驾驶系统技术方案都具有详细的设计运行条件(odc)定义,进入自动驾驶模式之前,智能驾驶控制器需检测odc是否为正常状态,否则不能激活自动驾驶模式或功能受限。甚至,部分传感器、执行器的性能也会严重影响自动驾驶的功能。
2、因此,为满足当前检测需求,现提供一种自动驾驶车辆下线功能自动点检技术。
技术实现思路
1、本申请提供一种自动驾驶车辆下线功能自动点检方法及装置,基于ivi交互方式进行车辆下线点检,实现检测工作的自动化,有效提高点检效率以及避免发生漏检。
2、为实现上述目的,本申请提供以下方案。
3、第一方面,本申请提供了一种自动驾驶车辆下线功能自动点检方法,所述方法包括以下步骤:
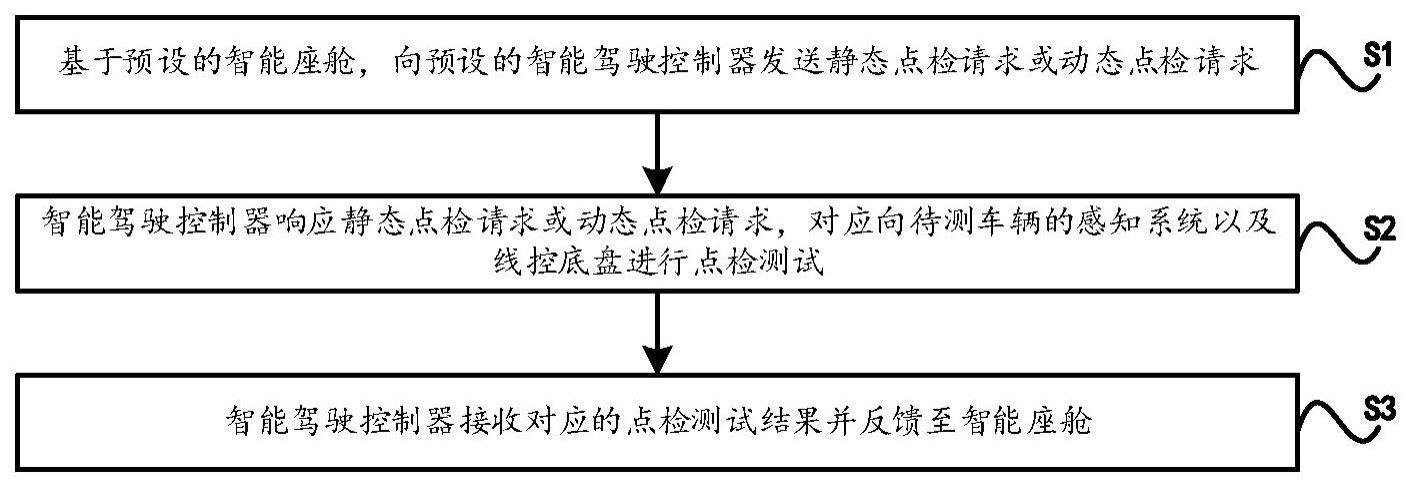
4、基于预设的智能座舱,向预设的智能驾驶控制器发送静态点检请求或动态点检请求;
5、所述智能驾驶控制器响应所述静态点检请求或所述动态点检请求,对应向待测车辆的感知系统以及线控底盘进行点检测试;
6、所述智能驾驶控制器接收对应的点检测试结果并反馈至所述智能座舱。
7、进一步的,所述智能驾驶控制器响应所述静态点检请求或所述动态点检请求,对应向待测车辆的感知系统以及线控底盘进行点检测试,包括以下步骤:
8、所述智能驾驶控制器响应所述静态点检请求,对应向待测车辆的感知系统的前毫米波雷达、激光雷达、视觉传感器以及高精度定位系统进行检测。
9、进一步的,所述智能驾驶控制器响应所述静态点检请求,对应向待测车辆的感知系统的前毫米波雷达、激光雷达、视觉传感器以及高精度定位系统进行检测,包括以下步骤:
10、所述智能驾驶控制器响应所述静态点检请求,发布对应的感知系统控制指令,控制所述待测车辆的感知系统的所述前毫米波雷达、所述激光雷达、所述视觉传感器以及所述高精度定位系统进行对应工作,检测对应的工作执行响应信息;
11、比对所述感知系统控制指令以及所述工作执行响应信息,生成所述点检测试结果。
12、进一步的,所述智能驾驶控制器响应所述静态点检请求或所述动态点检请求,对应向待测车辆的感知系统以及线控底盘进行点检测试,包括以下步骤:
13、所述智能驾驶控制器响应所述动态点检请求,对应向待测车辆的转向控制器、制动控制器、驱动控制器以及车身控制器进行点检测试。
14、进一步的,所述智能驾驶控制器响应所述动态点检请求,对应向待测车辆的转向控制器、制动控制器、驱动控制器以及车身控制器进行点检测试,包括以下步骤:
15、所述智能驾驶控制器响应所述动态点检请求,发布对应的线控底盘控制指令,控制所述待测车辆的线控地盘的所述转向控制器、所述制动控制器、所述驱动控制器以及所述车身控制器进行对应工作,检测对应的工作执行响应信息;
16、比对所述线控底盘控制指令以及所述工作执行响应信息,生成所述点检测试结果。
17、进一步的,基于预设的智能座舱,向预设的智能驾驶控制器发送静态点检请求或动态点检请求之前,所述方法还包括以下步骤:
18、基于所述智能座舱,向所述智能驾驶控制器发送工厂模式进入请求;
19、所述智能驾驶控制器自检是否满足工厂模式进入条件,待满足工厂模式进入条件后,进入工厂模式并将进入工厂模式反馈信息通知所述智能座舱。
20、第二方面,本申请提供了一种自动驾驶车辆下线功能自动点检装置,所述装置包括:
21、智能座舱,其用于发布静态点检请求或动态点检请求;
22、智能驾驶控制器,其用于响应所述静态点检请求或所述动态点检请求,对应向待测车辆的感知系统以及线控底盘进行点检测试;
23、所述智能驾驶控制器还用于接收对应的点检测试结果并反馈至所述智能座舱。
24、进一步的,所述智能驾驶控制器还用于响应所述静态点检请求,对应向待测车辆的感知系统的前毫米波雷达、激光雷达、视觉传感器以及高精度定位系统进行检测。
25、进一步的,所述智能驾驶控制器还用于响应所述静态点检请求,发布对应的感知系统控制指令,控制所述待测车辆的感知系统的所述前毫米波雷达、所述激光雷达、所述视觉传感器以及所述高精度定位系统进行对应工作,检测对应的工作执行响应信息;
26、所述智能驾驶控制器还用于比对所述感知系统控制指令以及所述工作执行响应信息,生成所述点检测试结果。
27、进一步的,所述智能驾驶控制器还用于响应所述动态点检请求,对应向待测车辆的转向控制器、制动控制器、驱动控制器以及车身控制器进行点检测试。
28、进一步的,所述智能驾驶控制器还用于所述智能驾驶控制器响应所述动态点检请求,发布对应的线控底盘控制指令,控制所述待测车辆的线控地盘的所述转向控制器、所述制动控制器、所述驱动控制器以及所述车身控制器进行对应工作,检测对应的工作执行响应信息;
29、所述智能驾驶控制器还用于比对所述线控底盘控制指令以及所述工作执行响应信息,生成所述点检测试结果
30、进一步的,所述智能座舱还用于向所述智能驾驶控制器发送工厂模式进入请求;
31、所述智能驾驶控制器还用于自检是否满足工厂模式进入条件,待满足工厂模式进入条件后,进入工厂模式并将进入工厂模式反馈信息通知所述智能座舱。
32、本申请提供的技术方案带来的有益效果包括:
33、本申请基于ivi交互方式进行车辆下线点检,实现检测工作的自动化,有效提高点检效率以及避免发生漏检。
技术特征:
1.一种自动驾驶车辆下线功能自动点检方法,其特征在于,所述方法包括以下步骤:
2.如权利要求1所述的自动驾驶车辆下线功能自动点检方法,其特征在于,所述智能驾驶控制器响应所述静态点检请求或所述动态点检请求,对应向待测车辆的感知系统以及线控底盘进行点检测试,包括以下步骤:
3.如权利要求2所述的自动驾驶车辆下线功能自动点检方法,其特征在于,所述智能驾驶控制器响应所述静态点检请求,对应向待测车辆的感知系统的前毫米波雷达、激光雷达、视觉传感器以及高精度定位系统进行检测,包括以下步骤:
4.如权利要求1所述的自动驾驶车辆下线功能自动点检方法,其特征在于,所述智能驾驶控制器响应所述静态点检请求或所述动态点检请求,对应向待测车辆的感知系统以及线控底盘进行点检测试,包括以下步骤:
5.如权利要求4所述的自动驾驶车辆下线功能自动点检方法,其特征在于,所述智能驾驶控制器响应所述动态点检请求,对应向待测车辆的转向控制器、制动控制器、驱动控制器以及车身控制器进行点检测试,包括以下步骤:
6.如权利要求1所述的自动驾驶车辆下线功能自动点检方法,其特征在于,基于预设的智能座舱,向预设的智能驾驶控制器发送静态点检请求或动态点检请求之前,所述方法还包括以下步骤:
7.一种自动驾驶车辆下线功能自动点检装置,其特征在于,所述装置包括:
8.如权利要求7所述的自动驾驶车辆下线功能自动点检装置,其特征在于:
9.如权利要求7所述的自动驾驶车辆下线功能自动点检装置,其特征在于:
10.如权利要求7所述的自动驾驶车辆下线功能自动点检装置,其特征在于:
技术总结
本申请涉及一种自动驾驶车辆下线功能自动点检方法及装置,涉及车辆测试技术领域,该方法包括以下步骤:基于预设的智能座舱,向预设的智能驾驶控制器发送静态点检请求或动态点检请求;所述智能驾驶控制器响应所述静态点检请求或所述动态点检请求,对应向待测车辆的感知系统以及线控底盘进行点检测试;所述智能驾驶控制器接收对应的点检测试结果并反馈至所述智能座舱。本申请基于IVI交互方式进行车辆下线点检,实现检测工作的自动化,有效提高点检效率以及避免发生漏检。
技术研发人员:方家萌,许鑫,李美艺,吕续玺,毛竹君,刘杏,王贝贝,李兆干,刘潇
受保护的技术使用者:东风商用车有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!