一种室外移动机器人系统和移动方法装置和介质与流程
本发明涉及一种室外移动机器人系统和移动方法装置和介质,属于机器人路径规划。
背景技术:
1、室外移动机器人在各种领域中都有着广泛的应用,但在未经人工干预的情况下,机器人往往面临路径规划和安全循迹的挑战。现有的技术通常需要复杂的传感器和算法,以确保机器人在复杂的室外环境中安全行驶。因此,有必要提供一种更为简便且高效的方法,以帮助室外移动机器人准确遵循预先规划的路径,并在路径周围生成安全区域。
技术实现思路
1、本发明目的是提供了一种室外移动机器人系统和移动方法装置和介质,用于路径预先获取与安全循迹。
2、本发明为实现上述目的,通过以下技术方案实现:
3、运动底盘,接收主机模块的命令,调整机器人位置;
4、障碍物检测模块,获取机器人运动过程中地形和障碍物,并将信息上传至路径规划模块规划路径;
5、rtk设备,用于获取高精度的位置和轨迹数据;
6、路径规划模块,该模块用于获取路径数据和环境采集模块采集的的地形和障碍物信息,对机器人移动路径进行规划,通过获取地形和障碍物信息生成最优路径;
7、路径比对与循迹模块,获取路径规划模块生成的最优路径和使用rtk设备测得的实时位置,并进行数据比对,并将对比结果信息发送至控制模块;
8、电子围栏生成模块,用于根据当前路径生成特定宽度的安全区域,所述安全区域宽度与机器人宽度保持一定比例;
9、控制模块,用于监控机器人的移动,实时处理路径比对和安全区域生成,控制机器人准确循迹沿着预定路径移动。
10、优选的,所述路径数据通过地图导航应用获取。
11、优选的,所述障碍物检测模块为激光雷达,通过激光传感器扫描机器人运动过程中地形和障碍物,并将信息上传至路径规划模块规划路径,机器人移动过程中所述激光雷达还用于扫描机器人与机柜或障碍物之间的距离,并将距离信息上传至控制模块。
12、优选的,所述安全区域宽度与机器人宽度比例为1∶3。
13、一种室外移动机器人移动方法,包括:
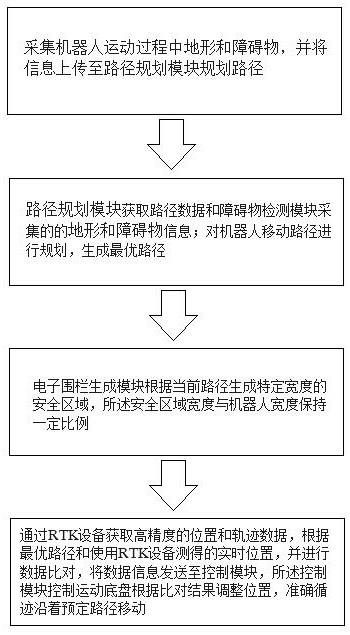
14、采集机器人运动过程中地形和障碍物,并将信息上传至路径规划模块规划路径;
15、路径规划模块获取路径数据和障碍物检测模块采集的的地形和障碍物信息;对机器人移动路径进行规划,生成最优路径;
16、电子围栏生成模块根据当前路径生成特定宽度的安全区域,所述安全区域宽度与机器人宽度保持一定比例;
17、通过rtk设备获取高精度的位置和轨迹数据,根据最优路径和使用rtk设备测得的实时位置,并进行数据比对,将数据信息发送至控制模块,所述控制模块控制运动底盘根据比对结果调整位置,准确循迹沿着预定路径移动。
18、本发明的优点在于:将路径预先获取与rtk技术相结合,实现了路径规划和高精度定位的无缝集成。这种集成使机器人能够在执行任务之前获取准确的路径数据,然后利用rtk技术实时比对并循迹沿着路径前进,从而提高了机器人的定位精度和路径跟踪能力,提高了操作效率。提供了高精度的循迹功能,使机器人能够准确遵循预定路径。定义安全区域的生成,可根据任务需求进行调整,确保机器人的安全运行。降低了对传感器和复杂算法的依赖,减少了系统的复杂性和成本。
技术特征:
1.一种室外移动机器人系统,其特征在于,包括:
2.根据权利要求1所述的室外移动机器人系统,其特征在于,所述路径数据通过地图导航应用获取。
3.根据权利要求1所述的室外移动机器人系统,其特征在于,所述障碍物检测模块为激光雷达,通过激光传感器扫描机器人运动过程中地形和障碍物,并将信息上传至路径规划模块规划路径,机器人移动过程中所述激光雷达还用于扫描机器人与机柜或障碍物之间的距离,并将距离信息上传至控制模块。
4.根据权利要求1-3任一所述的室外移动机器人系统,其特征在于,所述安全区域宽度与机器人宽度比例为1∶3。
5.一种使用权利要求1-4任一所述的室外移动机器人移动方法,其特征在于,包括:
6.一种室外移动机器人移动装置,包括处理器和存储有程序指令的存储器,其特征在于,所述处理器被配置为在运行所述程序指令时,执行如权利要求5所述的室外移动机器人移动方法。
7.一种存储介质,存储有程序指令,其特征在于,所述程序指令在运行时,执行如权利要求5所述的室外移动机器人移动方法。
技术总结
本发明提供了一种室外移动机器人系统和移动方法装置和介质,属于机器人路径规划技术领域。包括运动底盘,障碍物检测模块,RTK设备,路径规划模块,路径比对与循迹模块,电子围栏生成模块,控制模块。具体方法如下:采集机器人运动过程中地形和障碍物,并将信息上传至路径规划模块规划路径;路径规划模块生成最优路径;电子围栏生成模块根据当前路径生成特定宽度的安全区域,根据最优路径和使用RTK设备测得的实时位置,并进行数据比对,通过控制模块控制运动底盘移动。本发明实现了路径规划和高精度定位的无缝集成,提高了机器人的定位精度和路径跟踪能力,提高了操作效率,确保机器人的安全运行。
技术研发人员:刘海洋
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!