波浪环境下海洋机器人的节能控制方法及控制系统
本发明涉及海洋机器人的节能运动控制方法及控制系统。
背景技术:
1、海洋机器人作为一种海洋智能装备,其具有自主性强、成本低、功能多样等特点,对于充分利用海洋资源具有重要意义。海洋机器人在受到外界环境扰动后会导致控制效果不理想或失控现象发生,而其中波浪的影响最大,因此对海洋机器人在波浪干扰情况下的控制方法研究显得尤为重要。
2、无模型自适应控制方法不依赖精准的数学模型,仅利用系统的离在线数据来对控制器进行设计,非常适合海洋机器人这类容易受到外界环境干扰及模型摄动等问题造成难以得到其精确数学模型的设备。
3、公布号为cn108319140a,发明名称为“一种重定义输出式无模型自适应航向控制方法及系统”。将航向控制系统的输出量设为关于转艏角速度与艏向角相关的函数,作为无模型自适应控制器的负反馈输入,解决了无模型自适应控制方法无法直接应用在海洋机器人艏向控制系统的问题,但由于重定义输出量函数中存在一个固定增益参数,在不同波浪干扰情况下保持某一固定值,容易造成艏向控制系统振荡甚至是发散。
4、公布号为cn115268261a,发明名称为“一种基于双喷水推进器无人艇的改进mfac控制方法”,对mfac方法增加了积分环节和自适应衰减参数,对控制量使用tanh函数进行非线性化处理,解决了双喷水推进器无人艇系统响应慢、收敛振荡以及稳态误差等问题,然而并未考虑外界环境干扰情况对海洋机器人运动控制的影响,由于积分环节的存在会导致操纵装置高频往复转动造成能量消耗。
5、综上,上述方法均未考虑波浪干扰对海洋机器人艏向运动控制的影响,且难以在波浪干扰情况下保持良好的控制效果,容易造成振荡或发散,容易造成操纵装置过于频繁的往复转动,进而导致航行轨迹偏离期望路线,造成能量损耗与机械损坏。
技术实现思路
1、本发明的目的是为了解决现有方法均未考虑波浪干扰对海洋机器人艏向运动控制的影响,且难以在波浪干扰情况下保持良好的控制效果,容易造成振荡或发散,容易造成操纵装置过于频繁的往复转动,进而导致航行轨迹偏离期望路线,造成能量损耗与机械损坏的问题,而提出波浪环境下海洋机器人的节能控制方法及控制系统。
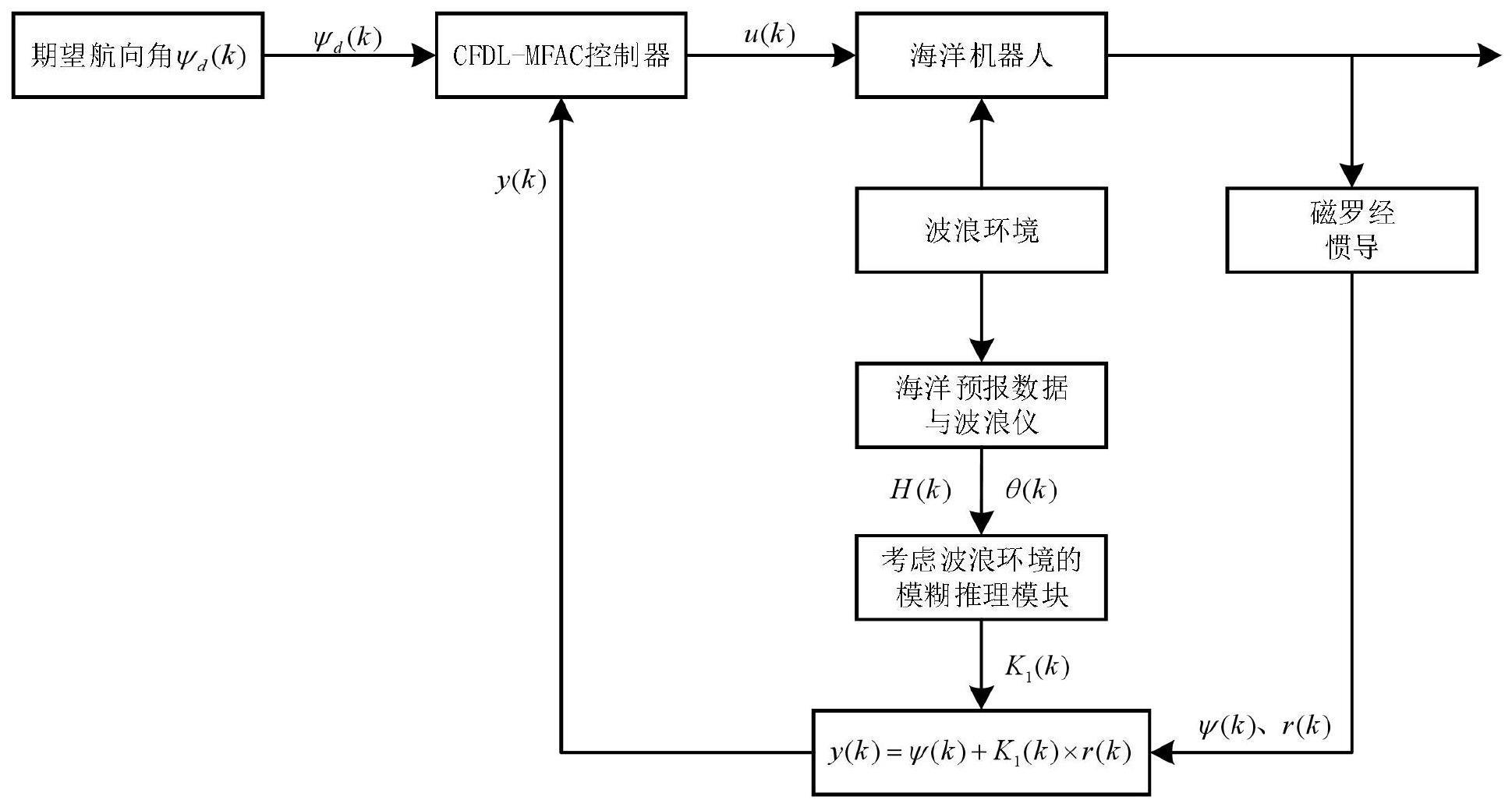
2、波浪环境下海洋机器人的节能控制方法具体过程为:
3、步骤1:设置当前k时刻的期望艏向角ψd(k);
4、通过磁罗经获取海洋机器人当前k时刻的实际艏向角ψ(k)、转艏角速度r(k)、遭遇角θ(k);
5、通过波浪仪获取海洋机器人当前k时刻的波浪的波高h(k);
6、步骤2:计算期望艏向角ψd(k)与实际艏向角ψ(k)的航向误差eψ(k);
7、若航向误差绝对值|eψ(k)|>e0,则执行步骤3;否则,结束艏向控制;
8、所述e0为航向误差阈值;
9、步骤3:设置考虑波浪环境的模糊推理模块,推理计算出波高h(k)和遭遇角θ(k)对应的时变增益参数k1(k);
10、步骤4:计算海洋机器人当前k时刻的艏向控制系统输出y(k);
11、步骤5:将期望艏向角ψd(k)与艏向控制系统输出y(k)输入cfdl-mfac控制器,得到海洋机器人当前k时刻的艏向控制系统的输入u(k);
12、所述cfdl-mfac为紧格式动态线性化无模型自适应控制;
13、步骤6:海洋机器人的操纵装置根据艏向控制系统的输入u(k)执行相应操作,之后令k=k+1,执行步骤1。
14、波浪环境下海洋机器人的节能控制系统用于执行波浪环境下海洋机器人的节能控制方法。
15、本发明的有益效果为:
16、本发明的目的在于提供一种波浪环境下海洋机器人无模型自适应(model freeadaptive control,mfac)节能控制方法与系统,使得海洋机器人能够在波浪环境中稳定航行的同时减少机械结构磨损,节约能源。该方法在无模型自适应控制方法和模糊控制方法的基础上,将两者相结合并进行改进,使得控制系统输出包含能够根据波浪情况实现在线调整的时变增益参数。
17、本发明分析海洋机器人在不同波浪环境与遭遇角情况下的运动情况,对考虑波浪环境的模糊推理模块进行设计,主要包含设计输入输出论域和考虑波浪环境的模糊推理规则,使得艏向控制系统可以根据当前波浪环境与海洋机器人运动状态得到时变增益参数。
18、本发明根据海洋机器人当前艏向角、转艏角速度和时变增益参数,设计包含时变增益参数的艏向控制系统输出,与艏向控制系统的期望艏向计算得到艏向误差值,通过紧格式动态线性化无模型自适应控制器(cfdl-mfac),得到艏向控制系统输入。
19、本发明由于改进无模型自适应控制(mfac)中存在时变增益参数,相较于传统固定增益参数的控制方法对环境适应能力更强,可以减少艏向操纵装置的高频往复运动次数,具有节能和减少机械磨损的效果。
20、在cfdl-mfac方法的基础上,通过分析海洋机器人在不同波浪干扰环境与遭遇角θ(k)情况下的运动控制响应情况,根据海洋机器人在不同波浪环境及顺浪或逆浪时响应速度的变化设计了考虑波浪环境的模糊推理规则,实现海洋机器人艏向控制系统中时变增益参数k1(k)的在线调整,从而提高海洋机器人艏向控制系统对环境的自适应能力。
21、海洋机器人运动过程中其艏向与波浪方向是不断变化的(即海洋机器人的遭遇角是不断变化的),考虑遭遇角θ(k)与增益参数k1(k)之间的关系,即:顺浪情况下,应使海洋机器人响应速度加快,对偏差进行快速调整;相反,在逆浪情况下,应使海洋机器人响应速度减慢,降低响应速度,防止振荡发生(本发明的响应速度与增益参数k1(k)的大小有关;k1(k)越大响应速度越慢;相反k1(k)越小响应速度越快)。同时,在不同波浪环境条件下的增益参数也需要随着波高的不同进行改变,即:波高较小情况下,海洋机器人自身扰动不大,可以适当降低响应速度;相反,波高较大时,海洋机器人受到的扰动增大,需要提高其响应速度,防止发生危险。
22、本发明根据海洋机器人当前的艏向角ψ(k)、转艏角速度r(k)和时变增益参数k1(k),设计包含时变增益参数k1(k)的艏向控制系统输出y(k)=ψ(k)+k1(k)×r(k)。相比固定增益参数,时变增益参数的存在增强了海洋机器人根据海洋环境自适应调整的能力,不仅使得紧格式动态线性化无模型自适应控制(cfdl-mfac)方法可以应用到海洋机器人艏向运动控制系统中,而且还提高了海洋机器人艏向控制系统对海洋环境的适应能力。
23、在应用传统控制方法的情况下,为避免海洋机器人受到波浪干扰而无法实现良好的控制效果,控制器的增益参数通常会设置的很大。虽然保证了海洋机器人对误差进行快速的响应调整,但却导致在控制过程中艏向操纵装置会往复高频转动,造成了能量损耗及机械磨损。而应用本发明提出的控制方法时,在顺浪航行情况下,海洋机器人运动速度快,本发明提出的控制方法可根据波浪环境情况对时变增益参数做出调整使得机器人运动响应加快,对偏差进行快速调整;相反,在逆浪航行情况下,海洋机器人运动速度慢,本发明提出的控制方法可根据波浪环境情况对时变增益参数做出调整使得海洋机器人运动响应变慢,减少操纵装置的往复振荡。
- 还没有人留言评论。精彩留言会获得点赞!