海洋机器人的高阶输出式无模型自适应航向控制方法及系统
本发明属于海洋机器人控制,具体涉及一种uwv的航向控制方法及系统。
背景技术:
1、海洋机器人(unmanned marine vehicle,umv)的航向控制对于整个umv系统的运动控制来说非常重要,只有确保了umv的航向稳定,才能有效地跟踪期望航迹。目前在实际工程应用中,umv的航向控制主要采用pid控制算法以及常规的基于“模型导向”设计策略开发的控制算法。pid控制器是一种基于离线数据的数据驱动控制算法,但umv运行于海洋环境中时容易受到模型摄动、海洋环境干扰力等影响,导致pid控制器难以维持一致的控制效果,需要重新调整参数才能使系统保持稳定以及实现良好的控制性能。而基于“模型导向”设计策略开发的控制器,严重地依赖于系统数学模型,但是获取精确的数学模型十分困难,存在未建模动态、模型摄动等影响导致系统的自适应较差,难以保证系统鲁棒性能,无法在工程中应用。
2、公开日2021年06月01日,公布号为cn108319140b,发明名称为“一种重定义输出式无模型自适应航向控制方法及系统”,通过重定义umv航向控制系统的输出,使得umv航向控制系统满足无模型自适应控制(model free adaptive control,mfac)理论对受控系统“拟线性”假设条件的要求,从而使得该重定义输出式mfac算法适应于umv的航向控制,但是该方法在观测噪声影响下控制效果较差,高阶输出cfdl_mfac方法可以改善这一问题。相对于重定义输出式mfac算法,本方法在准则函数中引入了输出数据的高阶信息,加快了算法的动态响应速度,且具有一定的预测功能,同时能抑制系统的振荡发散情况。
3、公开日2022年11月01日,公布号为cn115268261a,发明名称为“一种基于双喷水推进器无人艇的改进mfac控制方法”,通过积分环节、自适应衰减参数以及tanh函数非线性化处理,解决双喷水推进器无人艇系统响应慢、收敛振荡以及稳态误差等问题,但是未考虑umv的航向控制系统与mfac控制器之间动态响应速度不匹配的问题。
4、在文献“大型舰船综合减摇系统无模型自适应控制”,作者马洁利用无模型自适应控制算法设计了减摇鳍/被动舱综合控制的控制器,虽然与本发明的高阶输出信息式无模型自适应算法在形式上类似,但本质上却不同。舰船横摇系统的动力学特性使得mfac控制器可以直接应用于其控制器的设计中,并不涉及系统与mfac控制器动态响应速度不匹配的问题。
5、公开日2018年11月13日,公布号为cn108803647b,发明名称为“一种用于航天器姿态控制的无模型数据驱动控制方法”,在传统的紧格式离散数据动态线性化无模型自适应控制的基础上,引入航天器的激励响应特征,得到用于航天器的无模型自适应控制方法,控制收敛时间更短。但该方法仅针对航天器的控制,不能使mfac算法应用到umv这类惯性回转体的控制中。
6、公开日2017年11月17日,公布号为cn107357166b,发明名称为“小型无人直升机的无模型自适应鲁棒控制方法”,根据前一时刻的姿态采样数据以及控制器输出采样数据,对当前时刻控制器的输出数据进行实时调整和补偿,实现良好的小型无人直升机姿态控制。但该方法是利用无模型自适应控制思想来弥补模型参数不确定性,控制器依旧是基于“模型导向”设计策略开发的。
7、上述mfac算法均未解决航向控制系统与mfac控制器之间动态响应速度不匹配的问题,即umv航向控制系统中的积分环节叠加扩张控制输入,表现为一个快速的动态过程,而mfac方法针对控制输入和输出信息的在线学习与控制,表现为一个缓慢辨识的动态过程。
技术实现思路
1、本发明为了解决现有mfac算法均存在的航向控制系统与mfac控制器之间动态响应速度不匹配的问题。
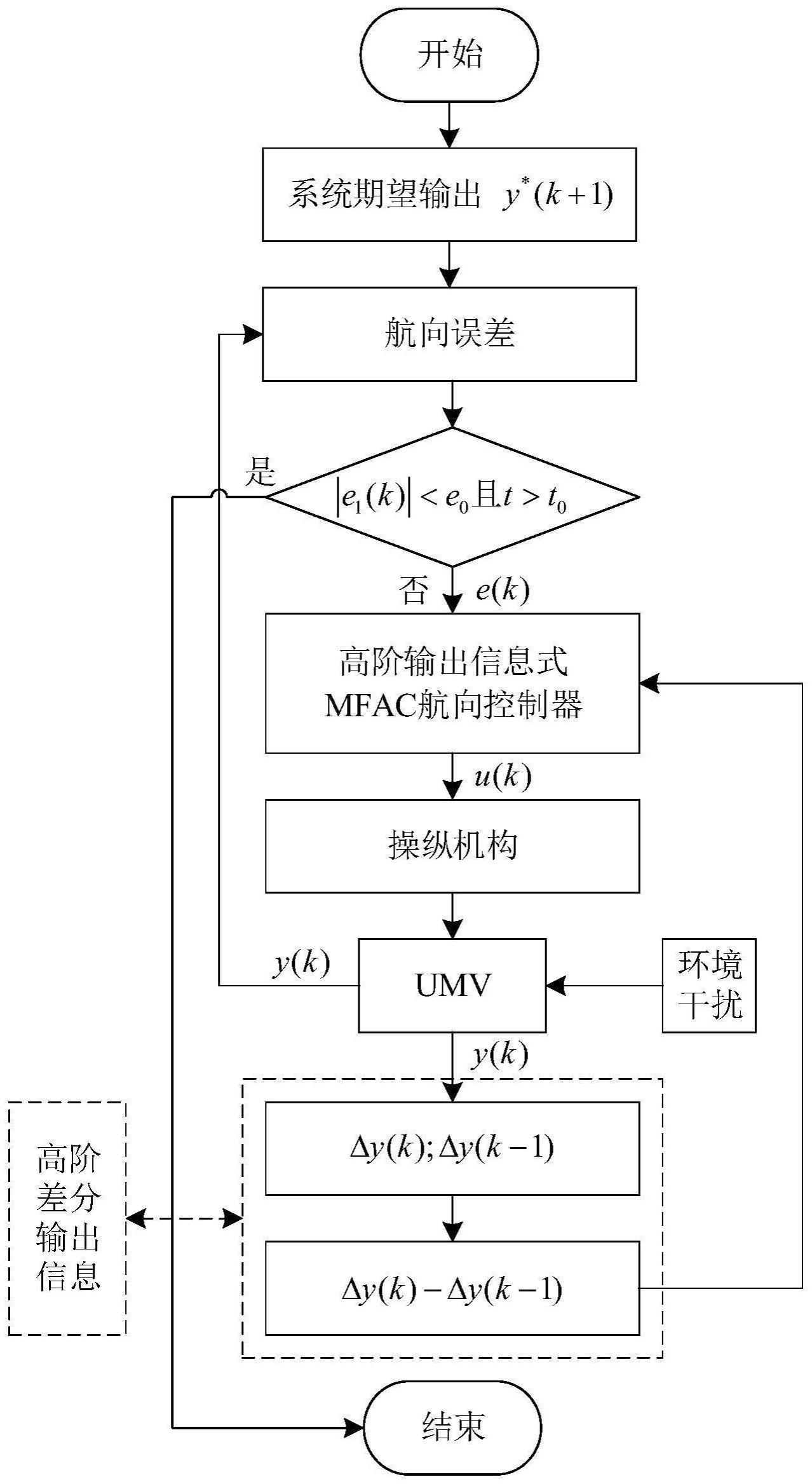
2、一种海洋机器人的高阶输出式无模型自适应航向控制方法,包括以下步骤:
3、步骤一:针对umv,计算控制器运行k次时的实际艏向与运行k-1次时的实际艏向的差值得到一阶差分输出信息δy(k),计算控制器运行k-1次时的实际艏向与运行k-2次时的实际艏向的差值得到一阶差分输出信息δy(k-1);所述umv包括无人水下机器人和无人水面机器人;
4、步骤二:计算一阶差分输出信息δy(k)和δy(k-1)的差值得到二阶差分输出信息;
5、步骤三:将艏向误差e(k)、一阶差分输出信息δy(k)、二阶差分输出信息δy(k)-δy(k-1)作为无模型自适应控制器的输入解算出期望输入u(k),所述的无模型自适应控制器采用高阶输出信息式紧格式无模型自适应控制器,无模型自适应控制器基于控制输入准则函数构建得到,所述控制输入准则函数如下:
6、
7、其中,u(k)为k时刻的期望舵角;u(k-1)为k-1时刻的期望舵角;y(k)是k时刻的实际输出;y(k+1)是k+1时刻的实际输出;y*(k+1)是k+1时刻的期望输出;δy(k-1)是k-1时刻的一阶差分输出信息;δy(k)是k时刻的一阶差分输出信息;δy(k+1)是k+1时刻的一阶差分输出信息;λ是权重因子;ts>0是采样周期;
8、步骤四:更新操纵机构的期望输入u(k),将期望输入指令下达到操纵机构,操纵机构执行期望输入指令,改变水中航行设备umv的航向;通过姿态传感器测得水中航行设备的航向角,更新系统实际艏向,执行步骤一。
9、进一步地,所述采用高阶输出信息式紧格式无模型自适应控制器,具体如下:
10、
11、
12、若或|δu(k-1)|≤ε或有
13、
14、其中,λ,μ是权重因子;ρ,η,k1,k2是步长因子;是k时刻的伪偏导数;是k-1时刻的伪偏导数;是初时刻的伪偏导数;ε是一个正数,sign(·)是符号函数。
15、进一步地,将高阶输出信息式紧格式无模型自适应控制器替换为高阶输出信息式偏格式无模型自适应控制器,即将高阶输出信息引入到偏格式控制方案中得到高阶输出信息式偏格式无模型自适应控制算法。
16、或者,将高阶输出信息式紧格式无模型自适应控制器替换为高阶输出信息式全格式无模型自适应控制器,即将高阶输出信息引入到全格式控制方案中得到高阶输出信息式全格式无模型自适应控制算法。
17、一种海洋机器人的高阶输出式无模型自适应航向控制系统,所述控制系统包括:
18、一阶差分输出信息计算单元:用于计算控制器运行k次时的实际艏向与运行k-1次时的实际艏向的差值得到一阶差分输出信息δy(k),计算控制器运行k-1次时的实际艏向与运行k-2次时的实际艏向的差值得到一阶差分输出信息δy(k-1);
19、二阶差分输出信息计算单元:用于计算一阶差分输出信息δy(k)和δy(k-1)的差值得到二阶差分输出信息;
20、控制单元:将艏向误差e(k)、一阶差分输出信息δy(k)、二阶差分输出信息δy(k)-δy(k-1)作为无模型自适应控制器的输入解算出期望输入u(k),所述的无模型自适应控制器采用高阶输出信息式紧格式无模型自适应控制器,无模型自适应控制器基于控制输入准则函数构建得到,所述控制输入准则函数如下:
21、
22、其中,u(k)为k时刻的期望舵角;u(k-1)为k-1时刻的期望舵角;y(k)是k时刻的实际输出;y(k+1)是k+1时刻的实际输出;y*(k+1)是k+1时刻的期望输出;δy(k-1)是k-1时刻的一阶差分输出信息;δy(k)是k时刻的一阶差分输出信息;δy(k+1)是k+1时刻的一阶差分输出信息;λ是权重因子;ts>0是采样周期。
23、进一步地,所述控制单元中的高阶输出信息式紧格式无模型自适应控制器,具体如下:
24、
25、
26、若或|δu(k-1)|≤ε或有
27、
28、其中,λ,μ是权重因子;ρ,η,k1,k2是步长因子;是k时刻的伪偏导数;是k-1时刻的伪偏导数;是初时刻的伪偏导数;ε是一个正数,sign(·)是符号函数。
29、进一步地,所述控制单元中的高阶输出信息式紧格式无模型自适应控制器替换为高阶输出信息式偏格式无模型自适应控制器,即将高阶输出信息引入到偏格式控制方案中得到高阶输出信息式偏格式无模型自适应控制算法。
30、或者,所述控制单元中的高阶输出信息式紧格式无模型自适应控制器替换为高阶输出信息式全格式无模型自适应控制器,即将高阶输出信息引入到全格式控制方案中得到高阶输出信息式全格式无模型自适应控制算法。
31、有益效果:
32、本发明通过在控制输入准则函数中引入高阶输出信息,解决umv航向控制系统与mfac控制器之间动态响应速度不匹配的问题,使得该高阶输出信息式mfac算法可以直接应用于umv的航向控制子系统。从加强对将来的控制角度出发,依据系统的实际输出数据信息进行构建一阶差分项和二阶差分项,加快标准mfac控制方案的动态响应速度,达到一定的预测控制的作用,降低响应调节的时间,解决航向控制子系统与mfac控制器之间动态响应速度不匹配的问题,即umv航向控制子系统中的积分环节叠加扩张控制输入,表现为一个快速的动态过程,而mfac方法针对控制输入和输出信息的在线学习与控制,表现为一个缓慢辨识的动态过程。
- 还没有人留言评论。精彩留言会获得点赞!