一种风洞跨声速阶梯变攻角试验的马赫数复合控制方法与流程
本发明涉及风洞流场控制领域。更具体地说,本发明涉及一种风洞跨声速阶梯变攻角试验的马赫数复合控制方法。
背景技术:
1、阶梯变攻角是一种风洞常用的试验方式,单次试验中有若干个试验模型攻角序列,需要在每个攻角状态下测量稳态的气动参数。跨声速阶梯变攻角试验,攻角对马赫数控制有比较明显的干扰,并且这种干扰是强非线性的,攻角的变化会造成马赫数的波动。
2、现有的马赫数控制方法主要基于经典的pid控制或者在其基础上进行改进得控制方法,但是这类控制方法难以抑制攻角对马赫数的干扰,在阶梯变攻角过程中,马赫数控制误差通常会超过误差带,马赫数再次控稳需数秒时间。
3、风洞是一种能耗巨大的设备,风洞试验通常以秒来计时,为了进一步缩短马赫数控稳时间,降低风洞试验能耗,有研究人员提出了马赫数前馈-反馈复合控制。反馈控制仍基于pid控制,关键环节在于前馈控制器的设计。前馈控制需要根据迎角的变化对马赫数调节装置进行前馈补偿,前馈补偿量与马赫数、模型堵塞度、攻角、模型气动外形等多种因素有关,特别是模型的气动外形难以用特定的函数来表征。而现有的前馈控制方法主要是通过统计数据得到前馈补偿量,对于新的试验模型、试验工况,则难以保证前馈补偿量的准确性,反而会加剧马赫数的波动,特别是对于新建风洞由于缺乏历史试验数据,上述基于统计数据的前馈控制方法难以实施。
技术实现思路
1、本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
2、为了实现本发明的这些目的和其它优点,提供了一种风洞跨声速阶梯变攻角试验的马赫数复合控制方法,在风洞跨声速阶梯变攻角试验中基于复合控制方式对马赫数进行调节,且所述复合控制包括前馈控制和反馈控制;
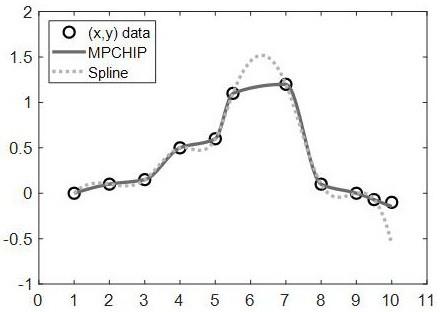
3、其中,所述前馈控制被配置为采用基于局部单调的分段三次hermite插值多项式mpchip实现,所述反馈控制则采用增量式pi控制实现。
4、优选的是,所述前馈控制中mpchip插值函数的获取方式为:
5、s1、基于已知样本点( x0, y0),( x1, y1),……,( x n, y n),建立分段插值函数 f( x);
6、s2、对样本点中的各内点、各端点进行求导处理,以得到分段插值函数 f( x)中各系数的值。
7、优选的是,
8、在s1中,所述分段插值函数 f( x)在[ x j, x j+1]分段区间内,表示为:
9、
10、上式中,c1、c2、c3、c4为分段插值函数 f( x)中的各系数;
11、设是一阶导数,则:
12、
13、由端点 x j和 x j+1两个点处的值,可以得到:
14、
15、令 x j处的差商为为 δ j,记为 d j,令 x j+1- x j= h j,则:
16、
17、上式中的 yj为已知样本点( x0, y0),( x1, y1),……,( x n, y n)中的第j个点。
18、优选的是,在s2中,各内点处的导数求取规则为:
19、若第 j个节点附近的差商 δ j-1和 δ j符号相反,或者其中一个为0,则该点的一阶导数为0;
20、若第 j个节点附近的差商 δ j-1和 δ j符号相同,则该点处的一阶导数 d j等于左右两个差商的加权平均;
21、令 hs j= h j+1+ h j,,,,;
22、则:
23、上式中,若 δ j= δ j+1,则 δmin j= δmax j= δ j= δ j+1,
24、若 δ j≠ δ j+1,则 δmin j δmax j= δ j= δ j+1,故:
25、。
26、优选的是,在s2中,各端点处的导数求取方式为:
27、采用非中点的三点公式求解端点处的一阶导数值,即采用三个点( x0, y0),( x1, y1),( x2, y2)的二次插值多项式进行如下表示:
28、
29、则,其导数为:
30、
31、将 x= x0, x2代入上式,并化简得到:
32、
33、则:
34、
35、若 d0和 δ0符号不一致时,则将 d0设为0;
36、若 δ0和 δ1符号不一致,即 x1处是一个极值点,令 d0=3 δ0;
37、若 d n和 δ n-1符号不一致,则将 d n为0;
38、若 δ n-2和 δ n-1符号不一致,即 x n-1处是一个极值点,令 d n=3 δ n-1。
39、优选的是,所述前馈控制的实现方式为:
40、s3,创建两个等维数的一维数组 a、 s,数组 a用于存储攻角序列值,数组 s用于存储流场稳定后每个攻角对应的马赫数调节结构的位置,将元素( a[1], s[1])、( a[2], s[2])……( a[m], s[m])设置为mpchip插值函数的样本点;
41、s4,基于s3中的样本点,按s1~s2的流程获取mpchip插值函数的各系数;
42、s5,在前馈控制中,当攻角序列号m≤3时,前馈补偿量为0;
43、当攻角序列号m大于3,前馈控制量 uf( k)按照下式计算:
44、
45、上式中,和 a( k)分别为当前控制周期的前馈控制量和攻角值,和 a( k-1)分别为上一个控制周期的前馈控制量和攻角值,f( )为mpchip插值函数。
46、优选的是,所述反馈控制中的增量式pi控制 upi( k)由以下公式得到:
47、
48、上式中, kp为比例系数, ki为积分系数, e( k)为系统控制目标值 y*和系统实际输出 y之差;
49、则所述复合控制 usum( k)的输出表达式为:
50、。
51、本发明至少包括以下有益效果:
52、其一,本发明所提出的复合控制方法对于风洞跨声速试验攻角对马赫数的干扰有较好的抑制效果,能够使马赫数快速稳定,缩短风洞试验时间,降低风洞运行能耗。
53、其二,本发明所提出的前馈控制方法,基于风洞实时试验数据进行在线插值运算,不依赖被控对象的数学模型,无需进行参数辨识和建模,控制算法简便易实现,具有良好的工程适用性。
54、其三,本发明所提出的复合控制方法采用增量式算法,控制方法在切除和投入过程中不会引起控制量的突变,实现了无扰切换。
55、本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
- 还没有人留言评论。精彩留言会获得点赞!