路径规划方法、装置、无人车及存储介质与流程
本发明涉及无人车,尤其涉及一种路径规划方法、装置、无人车及存储介质。
背景技术:
1、无人车是自动执行工作的机器装置,既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。无人车的任务协助或取代人类工作的工作,例如生产、生活、物流领域,或是其他领域的工作。随着计算机通信等技术的不断发展,越来越多的相关技术应用在无人车行业,但无人车行业也对技术提出了更高的要求,例如,无人车行业对无人车的路径规划也有了更高的要求。
2、目前大部分无人车会在规划路径的过程中检测是否会与障碍物发生碰撞,或者是通过传感器或传感技术在行驶过程中进行碰撞检测。目前,大部分无人车规划路径时侧重于增强无人车的通过性,规划策略过于激进,通常基于路径长度、转向次数等属性信息进行路径规划,忽视障碍物对路径规划的影响,导致无人车在某些行进情形中距离障碍物很近,极其容易发生和周边的障碍物发生碰撞或剐蹭的情况。
技术实现思路
1、本发明实施例提供一种路径规划方法、装置、无人车及存储介质,能减少因距离障碍物过近导致碰撞或剐蹭等情况的发生,降低发生行驶安全事故的概率。
2、为解决上述技术问题,第一方面,本发明实施例提供一种路径规划方法,应用于无人车,所述方法包括:
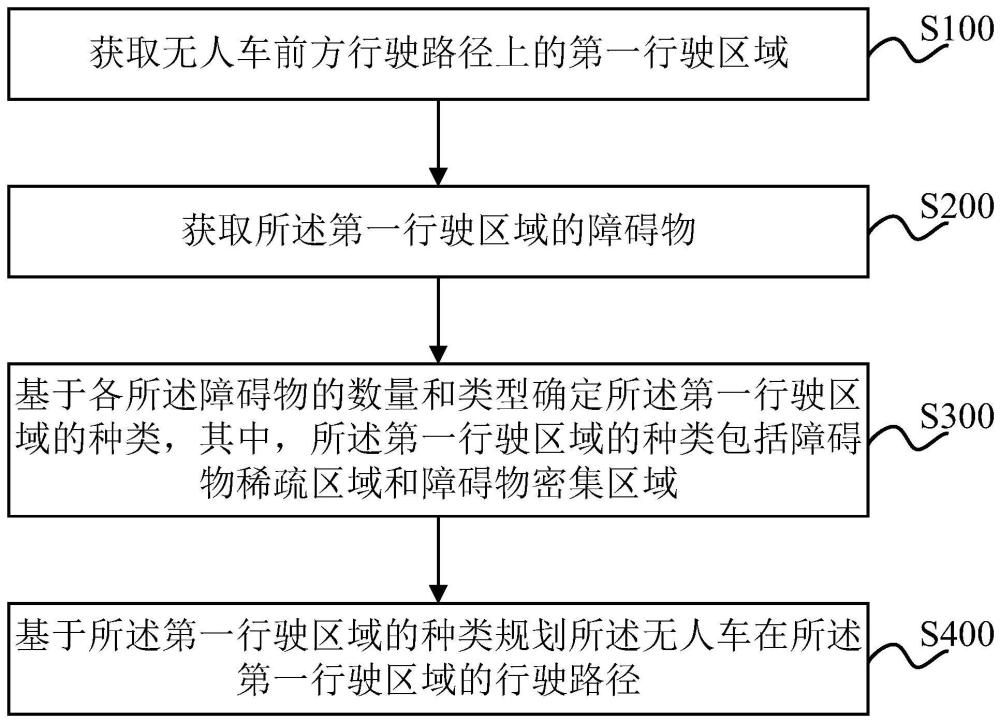
3、获取无人车前方行驶路径上的第一行驶区域;
4、获取所述第一行驶区域的障碍物;
5、基于各所述障碍物的数量和类型确定所述第一行驶区域的种类,其中,所述第一行驶区域的种类包括障碍物稀疏区域和障碍物密集区域;
6、基于所述第一行驶区域的种类规划所述无人车在所述第一行驶区域的行驶路径。
7、在一些实施例中,所述基于所述第一行驶区域的种类规划所述无人车在所述第一行驶区域的行驶路径,包括:
8、若所述第一行驶区域为障碍物稀疏区域,基于各所述障碍物的位置规划所述无人车在所述第一行驶区域的多条候选路径;
9、计算所述多条候选路径中每条候选路径的第一路径代价值;
10、根据所述第一路径代价值和所述多条候选路径中的任一位置点到障碍物的最短距离,在所述多条候选路径中确定出第一行驶路径,其中,所述第一行驶路径中的任一位置点到障碍物的最短距离大于第一距离阈值;
11、针对所述第一行驶路径,设置所述无人车执行所述第一行驶路径时的第一最高速度。
12、在一些实施例中,所述方法还包括:
13、若所述第一行驶区域为障碍物密集区域,基于各所述障碍物的位置规划所述无人车在所述第一行驶区域的多条候选路径;
14、计算所述多条候选路径中每条候选路径的第二路径代价值;
15、根据所述第二路径代价值和所述多条候选路径中的任一位置点到障碍物的最短距离,在所述多条候选路径中确定出第二行驶路径,其中,所述第二行驶路径中的任一位置点到障碍物的最短距离大于第二距离阈值,所述第二距离阈值小于所述第一距离阈值;
16、针对所述第二行驶路径,设置所述无人车执行所述第二行驶路径时的第二最高速度,其中,所述第二最高速度小于所述第一最高速度。
17、在一些实施例中,所述第一行驶区域的种类还包括障碍物普通区域;
18、所述方法还包括:
19、若所述第一行驶区域为障碍物普通区域,基于各所述障碍物的位置规划所述无人车在所述第一行驶区域的多条候选路径;
20、计算所述多条候选路径中每条候选路径的第三路径代价值;
21、根据所述第三路径代价值和所述多条候选路径中的任一位置点到障碍物的最短距离,在所述多条候选路径中确定出第三行驶路径,其中,所述第三行驶路径中的任一位置点到障碍物的最短距离大于第三距离阈值,所述第三距离阈值小于所述第一距离阈值;
22、针对所述第三行驶路径,设置所述无人车执行所述第三行驶路径时的第三最高速度,其中,所述第三最高速度小于所述第一最高速度。
23、在一些实施例中,所述基于各所述障碍物的数量和类型确定所述第一行驶区域的种类,包括:
24、获取所述第一行驶区域中的各所述障碍物的数量和类型,将各所述障碍物中类型为移动类型、且移动速度大于零的障碍物确定为第一障碍物;
25、若各所述障碍物的数量大于或等于第一数量阈值,则将所述第一行驶区域的种类确定为障碍物密集区域;
26、若各所述障碍物的数量小于所述第一数量阈值,且大于或等于第二数量阈值,所述第一障碍物的数量小于各所述障碍物的数量的预设倍数值,则将所述第一行驶区域的种类确定为障碍物密集区域;
27、若各所述障碍物的数量小于所述第二数量阈值,且大于或等于第三数量阈值,所述第一障碍物的数量大于或等于各所述障碍物的数量的预设倍数值,且所述第一障碍物在所述第一行驶区域中的移动方向为远离所述无人车的方向,则将所述第一行驶区域的种类确定为障碍物稀疏区域;
28、若各所述障碍物的数量小于所述第三数量阈值,则将所述第一行驶区域的种类确定为障碍物稀疏区域。
29、在一些实施例中,所述第一行驶区域的种类还包括障碍物普通区域;
30、所述方法还包括:
31、若各所述障碍物的数量小于所述第一数量阈值,且大于或等于所述第二数量阈值,所述第一障碍物的数量大于或等于各所述障碍物的数量的预设倍数值,且所述第一障碍物在所述第一行驶区域中的移动方向为远离所述无人车的方向,则将所述第一行驶区域的种类确定为障碍物普通区域;
32、若所述第一障碍物的数量小于各所述障碍物的数量的预设倍数值,则将所述第一行驶区域的种类确定为障碍物普通区域。
33、在一些实施例中,所述获取所述无人车前方行驶路径上的第一行驶区域,包括:
34、获取所述无人车行驶方向上第一距离、第一宽度的行驶区域,将所述行驶区域确定为所述无人车前方行驶路径上的第一行驶区域。
35、为解决上述技术问题,第二方面,本发明实施例提供一种路径规划装置,包括:
36、第一获取模块,用于获取无人车前方行驶路径上的第一行驶区域;
37、第二获取模块,用于获取所述第一行驶区域的障碍物;
38、确定模块,用于基于各所述障碍物的数量和类型确定所述第一行驶区域的种类,所述第一行驶区域的种类包括障碍物稀疏区域和障碍物密集区域;
39、规划模块,用于基于所述第一行驶区域的种类规划所述无人车在所述第一行驶区域的行驶路径。
40、为解决上述技术问题,第三方面,本发明实施例提供一种无人车,包括:
41、处理器以及与所述处理器通信连接的存储器;
42、所述存储器中存储有所述处理器可执行的计算机程序指令,所述计算机程序指令在被所述处理器调用时,以使所述处理器执行本技术第一方面提出的任一项路径规划方法,或本技术第一方面提出的任一项路径规划方法中任一种可能实施方式中的步骤。
43、为解决上述技术问题,第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序指令,处理器运行所述计算机程序指令,以执行本技术第一方面提出的任一项路径规划方法,或本技术第一方面提出的任一项路径规划方法中任一种可能的实施方式中的步骤。
44、本发明实施例的有益效果:区别于现有技术的情况,本发明实施例提供的路径规划方法,应用于无人车,所述路径规划方法包括:获取无人车前方行驶路径上的第一行驶区域;获取所述第一行驶区域的障碍物;基于各所述障碍物的数量和类型确定所述第一行驶区域的种类,其中,所述第一行驶区域的种类包括障碍物稀疏区域和障碍物密集区域;基于所述第一行驶区域的种类规划所述无人车在所述第一行驶区域的行驶路径。该方法通过获取无人车行驶区域内的障碍物,以规划行驶路径,减少因距离障碍物过近导致碰撞或剐蹭等情况的发生,降低发生行驶安全事故的概率。
- 还没有人留言评论。精彩留言会获得点赞!