一种智能机器人无人清洗控制方法与流程
本发明涉及智能机器人,具体涉及一种智能机器人无人清洗控制方法。
背景技术:
1、随着科技不断的发展,智能机器人逐步成为清洁行业的刚需,使用智能机器人对清洗区域进行清洗时,智能机器人清洗路径的规划,直接决定了智能机器人清洗的效率。
2、现有方法中基于迪杰斯特拉(dijkstra)算法,预先对智能机器人的清洗区域进行定位,建立地图,进行最短路径的选择划分。但在商场中,对智能机器人进行规划路径时,需要考虑智能机器人的剩余电量是否足够,并不是简单只考虑智能机器人的剩余电量是否可以回到充电区域,还要考虑智能机器人的剩余电量对清洗动作控制精度的影响,例如,商场中的某些清洗区域存在清洗贵重物品或者楼梯等动作精度需求较高的操作。同时,由于商场中的高人流密度使得智能机器人在避让行人时,会消耗额外的电量,因此,只考虑最短路径对商场中的清洗区域进行清洗会导致智能机器人清洗路径的规划不合理,使得智能机器人的清洗效率较低。
技术实现思路
1、为了解决智能机器人清洗路径的规划不合理的技术问题,本发明的目的在于提供一种智能机器人无人清洗控制方法,所采用的技术方案具体如下:
2、本发明提出了一种智能机器人无人清洗控制方法,该方法包括以下步骤:
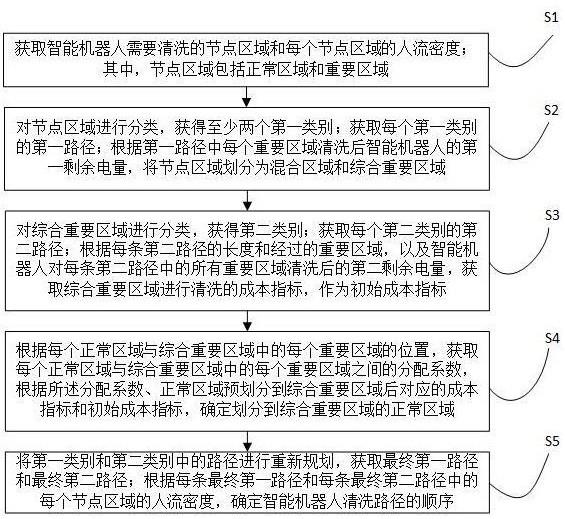
3、获取智能机器人需要清洗的节点区域和每个节点区域的人流密度;其中,节点区域包括正常区域和重要区域;
4、对节点区域进行分类,获得至少两个第一类别;获取每个第一类别的第一路径;根据第一路径中每个重要区域清洗后智能机器人的第一剩余电量,将节点区域划分为混合区域和综合重要区域;
5、对综合重要区域进行分类,获得第二类别;获取每个第二类别的第二路径;根据每条第二路径的长度和经过的重要区域,以及智能机器人对每条第二路径中的所有重要区域清洗后的第二剩余电量,获取综合重要区域进行清洗的成本指标,作为初始成本指标;
6、根据每个正常区域与综合重要区域中的每个重要区域的位置,获取每个正常区域与综合重要区域中的每个重要区域之间的分配系数,根据所述分配系数、正常区域预划分到综合重要区域后对应的成本指标和初始成本指标,确定划分到综合重要区域的正常区域;
7、将第一类别和第二类别中的路径进行重新规划,获取最终第一路径和最终第二路径;根据每条最终第一路径和每条最终第二路径中的每个节点区域的人流密度,确定智能机器人清洗路径的顺序。
8、进一步地,所述第一剩余电量的获取方法为:
9、获取智能机器人存储的总电量;
10、获取智能机器人清洗每个节点区域的清洗消耗电量;
11、任选一条第一路径作为参考路径,获取参考路径中每个重要区域之前的所有节点区域的清洗消耗电量的总和,作为每个重要区域的第一结果;
12、将每个重要区域的第一结果与清洗消耗电量的相加结果,作为每个重要区域的参考消耗电量;
13、将总电量与每个参考消耗电量的差值,作为每个重要区域清洗后智能机器人的第一剩余电量。
14、进一步地,所述将节点区域划分为混合区域和综合重要区域的方法为:
15、当第一剩余电量大于预设的剩余电量阈值时,将对应的重要区域和正常区域划分为混合区域;
16、当第一剩余电量小于或者等于预设的剩余电量阈值时,将对应的重要区域划分为综合重要区域。
17、进一步地,所述成本指标对应的计算公式为:
18、
19、式中,c为综合重要区域进行清洗的成本指标;为智能机器人对第n条第二路径中的所有节点区域清洗后的第二剩余电量;为第n条第二路径的总长度;为第n条第二路径经过的节点区域的总数量;n为综合重要区域中第二路径的总数量;norm为归一化函数。
20、进一步地,所述分配系数对应的计算公式为:
21、
22、式中,为第a个正常区域与综合重要区域中的第b个重要区域之间的分配系数;为第a个正常区域与智能机器人的充电区域之间的距离;为综合重要区域中的第b个重要区域与智能机器人的充电区域之间的距离;为第a个正常区域与综合重要区域中的第b个重要区域之间的距离;为绝对值函数。
23、进一步地,所述根据所述分配系数、正常区域预划分到综合重要区域后对应的成本指标和初始成本指标,确定划分到综合重要区域的正常区域的方法为:
24、选取综合重要区域中的任一个第二类别,作为参考第二类别;
25、获取参考第二类别中每个重要区域对应的最大分配系数,从大到小进行排序,获得参考第二类别的参考分配系数序列;
26、将参考分配系数序列中的第一个分配系数对应的至少一个正常区域,依次预划分到参考第二类别,当满足预设条件时,将第一个分配系数对应的正常区域划分到综合重要区域;继续获取参考分配系数序列中的第二个分配系数对应的正常区域中可以划分到综合重要区域的正常区域,直至参考分配系数序列中的第y个分配系数对应的每个正常区域均不满足预设条件时,停止向参考第二类别中划分正常区域;
27、将每个第二类别中划分的正常区域,作为划分到综合重要区域的正常区域。
28、进一步地,所述预设条件的获取方法为:
29、加入对应正常区域后参考第二类别的清洗消耗电量的总和小于总电量,以及加入对应正常区域后综合重要区域的成本指标小于或者等于初始成本指标。
30、进一步地,所述根据每条最终第一路径和每条最终第二路径中的每个节点区域的人流密度,确定智能机器人清洗路径的顺序的方法为:
31、将每条最终第一路径中的每个节点区域的人流密度进行累加,作为每条最终第一路径的第一整体人流量;
32、智能机器人根据最终第一路径对应的第一整体人流量从小到大的顺序,对最终第一路径进行清洗;
33、将每条最终第二路径中的每个节点区域的人流密度进行累加,作为每条最终第二路径的第二整体人流量;
34、智能机器人根据最终第二路径对应的第二整体人流量从小到大的顺序,对最终第二路径进行清洗。
35、进一步地,所述第一路径和第二路径的获取方法为:
36、获取每个节点区域和充电区域的中心;
37、将充电区域的中心作为起始点,根据每个节点区域的中心位置,获取每个第一类别对应的最短路径,作为第一路径;
38、将充电区域的中心作为起始点,根据综合重要区域中每个重要区域的中心位置,获取每个第二类别对应的最短路径,作为第二路径。
39、进一步地,所述第一类别和第二类别的获取方法为:
40、通过谱聚类对节点区域进行聚类,获得至少两个第一类别;其中,每个第一类别聚类的条件是每个第一类别中的所有清洗消耗电量的总和小于总电量;
41、通过谱聚类对综合重要区域中的重要区域进行聚类,获得第二类别;其中,每个第二类别聚类的条件是每个第二类别中的所有清洗消耗电量的总和小于总电量。
42、本发明具有如下有益效果:
43、根据第一路径中每个重要区域清洗后智能机器人的第一剩余电量,将节点区域划分为混合区域和综合重要区域,初步将节点区域进行分离,同时将部分重要区域划分到混合区域中,减少智能机器人的移动路径,提高智能机器人的清洗效率;为了进一步提高智能机器人的清洗效率,进而对综合重要区域中的重要区域进行分类,获得第二类别,获取每个第二类别的第二路径,减少智能机器人清洗重要区域的移动路径;为进一步减少智能机器人清洗重要区域在移动路径中的消耗,进而确定划分到综合重要区域的正常区域,减少智能机器人重复的移动路径,优化智能机器人的工作路径,进而根据最终的混合区域和综合重要区域,确定最终第一路径和最终第二路径,减少智能机器人在移动路径中的电量和时间的消耗,同时确保智能机器人将每条规划的路径中的节点区域清洗完成,使得智能机器人的移动路径规划的更合理,进而提高智能机器人的清洗工作效率;为了避免人流密度对智能机器人的清洗工作效率的影响,进而根据每条最终第一路径和每条最终第二路径中的每个节点区域的人流密度,确定智能机器人清洗路径的顺序,对多条路径进行优先度判定,保证智能机器人工作效率与安全的同时,减少智能机器人避障难度,提高智能机器人的清洗工作效率。
- 还没有人留言评论。精彩留言会获得点赞!