一种高可靠性高升力系统位置监控方法与流程
本发明涉及高升力系统领域,具体涉及一种高可靠性高升力系统位置监控方法。
背景技术:
1、高升力系统也称为高升力控制系统、襟缝翼系统或增升装置等,是根据飞行员操纵指令对襟缝翼翼面角度进行闭环控制的系统。高升力系统是通过前缘缝翼向下前伸和后缘襟翼退后偏转以增大飞机在起飞阶段的升力和着陆阶段的升阻力,从而缩短飞机起飞和着陆滑跑的距离,提高经济性。襟翼或缝翼的失效形式一般包括不对称、倾斜、非指令运动、超速和不一致等,不对称运动是指飞机左右两侧的襟翼或缝翼运动不一致,倾斜是指单侧襟翼或缝翼运动不一致导致翼面发生扭转,非指令运动是指襟翼或缝翼运动不到指定位置、超过指定位置或无响应指令,超速是指襟翼或缝翼运动超过标牌速度导致结构破坏,不一致是指襟翼运动的位置和手柄输入的位置不一致或运动过快、过慢等。
2、国内新研的民机arj21和c919以及国外民机a320、a380、erj190等的高升力系统均具有襟翼不对称运动和襟翼倾斜保护功能,不同的飞机采用的监测和保护措施也不尽相同。
3、cn106628119a提出一种飞机的襟缝翼状态监控系统,该方案是通过在作动器输出端安装转速传感器的方法监控襟翼的倾斜和不对称状态,增加了系统设备和重量。
4、cn209776788u提出一种襟翼不对称开关,该方案对于襟翼不对称故障监控是通过增加襟翼不对称开关实现的,增加了系统的设备数量和重量。
5、cn110550234a提出一种用于b737ng机队后缘襟翼监控方法及装置,该方案是通过左右襟翼位置传感器的差值进行故障监控,不能对襟翼左右侧故障进行定位。
6、根据对现有技术的调研可知,目前襟缝翼的不对称监控多以左右侧位置传感器反馈差值与阈值进行比较,不能很好地定位到系统的故障;部分方案中提出通过增加设备的方法,但增加设备增加了系统的设备数量和系统重量。
技术实现思路
1、本发明的目的是提供一种高可靠性高升力系统位置监控方法,用以实现在不增加系统设备数量和系统重量的前提下增加系统故障的定位能力。
2、为了实现上述任务,本发明采用以下技术方案:
3、一种高可靠性高升力系统位置监控方法,包括:
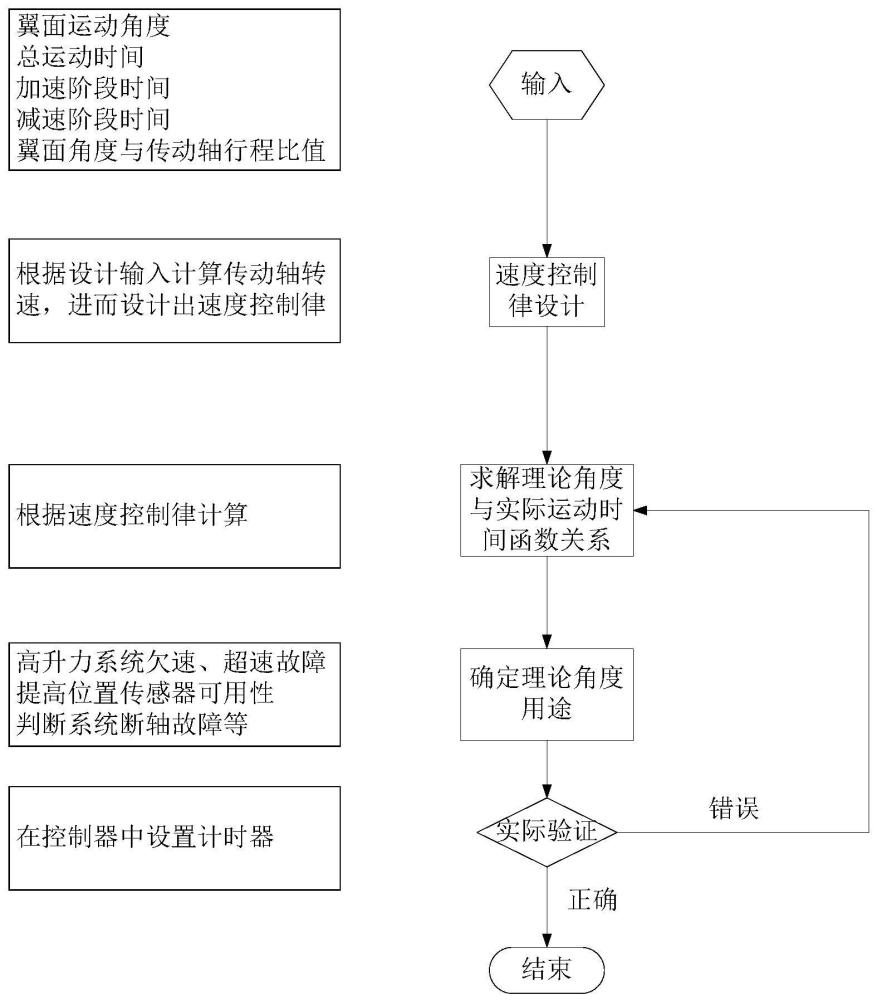
4、根据翼面运动角度、总运动时间、加速阶段时间、减速阶段时间和翼面角度与传动轴行程比值计算传动轴转速;
5、根据总运动时间、加速阶段时间、减速阶段时间和传动轴转速对系统的速度控制律进行设计;
6、通过速度控制律求解翼面理论角度与实际运动时间的函数关系,最后基于翼面运动实时时间作为变量计算翼面的理论角度,以及安装于翼尖的位置传感器反馈的翼面实际角度,进行故障判断类型。
7、进一步地,根据翼面运动角度、总运动时间、加速阶段时间、减速阶段时间和翼面角度与传动轴行程比值计算传动轴转速,包括:
8、根据翼面初始角度α1和目标角度α2计算得出翼面运动角度差δα=α2-α1;高升力系统传动轴匀速阶段的转速为n,根据加速阶段时间t1和翼面角度与传动轴行程比例系数c计算出加速阶段传动轴行程可得加速阶段翼面运动角度同理可得减速阶段翼面运动角度
9、根据总运动时间t、加速阶段时间t1和减速阶段时间t3计算出匀速阶段时间t2=t-t1-t3;根据匀速阶段时间t2和匀速阶段转速n计算匀速阶段传动轴行程s2=nt2,可得匀速阶段翼面运动角度θ2=cn(t-t1-t3);
10、则匀速阶段传动轴转速
11、进一步地,所述系统的速度控制律分为0~t1、t1~t-t3、t-t3~t三个阶段,其中0~t1为转速从0到n的加速阶段,t1~t-t3为转速保持为n的匀速阶段,t-t3~t为转速从n到0的减速阶段。
12、进一步地,通过速度控制律求解翼面理论角度与实际运动时间的函数关系,具体表示为:
13、
14、其中,t为翼面运动的实时时间,c为翼面角度与传动轴行程比例系数,n为匀速阶段传动轴转速,t1、t3为加速阶段时间和减速阶段时间,t为总运动时间,θt为翼面理论角度。
15、进一步地,翼面运动的实时时间t通过翼面运动过程中在软件中设置计时器得知。
16、进一步地,所述进行故障判断类型,包括:
17、将通过函数关系得出的实时时间t对应的翼面理论位置θt与安装于翼尖的位置传感器反馈的翼面实际角度θb进行比较:
18、当|θb-θt|≤δθ时,说明翼面实际角度与理论角度偏差较小,判定位置传感器反馈的值准确可信;
19、当θb-θt>δθ时,说明翼面实际角度大于理论角度较多,翼面运动较快,判定系统出现超速故障;当襟缝翼控制计算机判断出高升力系统出现不对称故障时,通过翼尖制动器和动力驱动装置制动器将高升力系统紧急制动并把持翼面在当前位置。
20、进一步地,阈值δθ的取值为0.2~2°。
21、进一步地,当θb-θt<δθ时,说明翼面实际角度小于理论角度较多,可知翼面运动较慢,判定系统出现欠速故障。
22、进一步地,当翼面实际角度小于理论角度较多时:
23、如翼面实际角度θb在翼面运动过程中变化但翼面实际角度小于理论角度较多时判断系统出现欠速故障,如翼面实际角度θb在翼面运动过程中不变化时判断系统出现卡滞故障,如传动线系断开时通过倾斜传感器进行故障监控,当位置传感器反馈电压为零时判断位置传感器通讯故障。
24、一种终端设备,包括处理器、存储器以及存储在所述存储器中的计算机程序;处理器执行计算机程序时,实现所述高可靠性高升力系统位置监控方法的步骤。
25、与现有技术相比,本发明具有以下技术特点:
26、(1)在不增加系统设备和重量的前提下提高了高升力系统的故障判断和定位能力。
27、(2)通过翼面理论角度和实际角度对比的方法能够实现高升力系统的欠速故障判断。
28、(3)通过翼面理论角度和实际角度对比的方法能够实现高升力系统的超速故障判断。
29、(4)通过翼面理论角度和实际角度对比的方法能够兼顾高升力系统传动线系断开导致的倾斜(部分)和不对称两类故障监控,当系统故障监控措施不完备时可以通过该方法进行倾斜和不对称故障监控。
30、(5)对于飞机或具有双侧高升力系统的试验,通过翼面理论角度和实际角度对比的方法能够定位是左侧机翼高升力系统故障还是右侧高升力系统故障。
31、(6)对于具有双余度位置传感器的系统而言,通过翼面理论角度和实际角度对比的方法能够提高位置传感器反馈的翼面角度的可靠度,当位置传感器一个通道反馈的值不可信后切换并使用另外一个通道反馈的值。
32、(7)对于仅具有单侧高升力系统且单余度位置传感器的试验,通过翼面理论角度和实际角度对比的方法能够实现高升力系统位置的自监控。
33、(8)理论角度与运动时间的函数关系近似于线性关系,这对于与线性加载系统的主-主同步驱动提供了理论依据。
- 还没有人留言评论。精彩留言会获得点赞!