一种欠驱动船舶自动靠泊控制方法
本发明涉及船舶靠泊,具体而言,尤其涉及一种欠驱动船舶自动靠泊控制方法。
背景技术:
1、船舶靠泊不仅需对位置进行精确控制,还对速度有严格的要求,因此被认为是最困难和最复杂的操纵之一。此外,数据统计,超过70%的港口事故归因于在港船员的不良船艺,这会造成严重的经济损失、人员伤亡和环境污染。伴随着工业4.0时代的到来,智能船舶成为当今海上交通运输发展的主流方向,其中自动靠泊作为实现智能船舶自主航行的关键技术成为研究热点之一。现有大多是将轨迹规划和自动靠泊控制分开研究,实际上轨迹规划为自动靠泊控制系统提供参考轨迹。
2、现有研究开发了一种欠驱动船舶自适应神经网络自动靠泊控制方法。首先,采用附加控制方法解决了欠驱动问题;其次,提出了一种基于导航动态深根信息的鲁棒神经网络自适应方法逼近未知扰动;最后,利用动态面控制和最小学习参数方法解决了自适应神经网络计算量大的问题。但在该研究中,只能实现特定位置的靠泊,如泊位位于坐标原点。而在实际的港口环境中,泊位可位于任意位置,因此该研究具有一定局限性。
技术实现思路
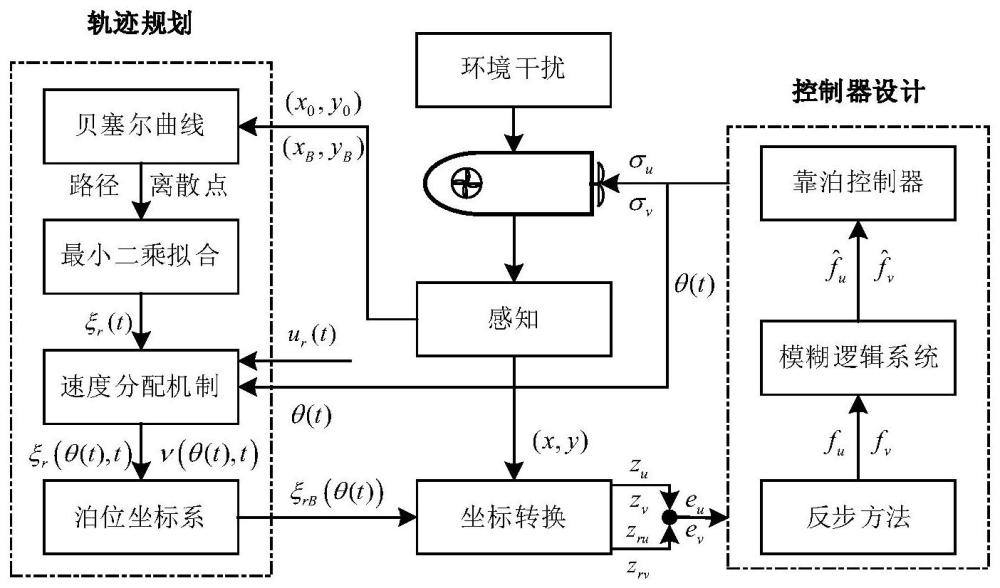
1、根据上述提出的技术问题,提供一种欠驱动船舶自动靠泊控制方法。本发明基于贝塞尔曲线、最小二乘拟合和速度分配机制,提出了一种新型的轨迹规划策略,为使用反步方法的自动靠泊控制系统提供可导的参考轨迹。为了实现任意泊位的靠泊控制,本发明提出了一种新型的大地坐标系和泊位坐标系之间的坐标转换方法。最后,将模糊逻辑系统融入到反步控制器中逼近未知船舶动态,从而减轻浅水和岸壁效应的影响。
2、本发明采用的技术手段如下:
3、一种欠驱动船舶自动靠泊控制方法,包括:
4、s1、利用贝塞尔曲线、最小二乘拟合和速度分配机制提出了一种轨迹规划策略,为基于反步方法的自动靠泊控制系统提供可导的参考轨迹;s2、将大地坐标系和泊位坐标系之间进行坐标转换,得到适用于任意泊位的靠泊轨迹;
5、s3、利用反步方法设计靠泊控制器,并将模糊逻辑系统融入到靠泊控制器设计中逼近未知船舶动态,减轻浅水和岸壁效应的影响。
6、进一步地,所述步骤s1,具体包括:
7、s11、选定3个控制点p1,p2,p3和参数δ,将一个二次的贝塞尔曲线表示为:
8、c(δ)=(1-δ)2p1+2δ(1-δ)p2+δ2p3
9、s12、根据步骤s11中的公式,生成离散形式的参考轨迹,如下:
10、c(δ)={(xr1,yr1),(xr2,yr2),...(xrm,yrm)}
11、s13、定义最小二乘拟合,如下:
12、yr(t)=μ0+μ1xr(t)+μ2xr(t)2+...+μkxr(t)k
13、式中,μ=[μ0,μ1,...,μk]t表示待确定系数;
14、s14、通过最小二乘拟合,将待确定系数μ设计如下:
15、μ=(xtx)-1xty
16、通过设计的确定系数μ,得到一条可导的参考轨迹ζr(t)=[xr(t),yr(t)]t。
17、s15、靠泊轨迹规划不仅要生成一条几何路径ξr(θ(t))=[xr(θ(t)),yr(θ(t))]t,还要赋予几何路径一个严格的时间限制,即:使路径的速度满足一个期望的速度ν(θ(t),t),具体表达如下:
18、
19、式中,表示速度误差;ν(θ(t),t)由一个期望的纵荡速度ur(t)获得,即:
20、
21、进一步地,所述步骤s2,具体包括:
22、s21、将大地坐标系和泊位坐标系之间进行坐标转换,即:
23、
24、式中,β表示泊位坐标系的xb轴与大地坐标系xe轴之间的夹角,逆时针为正,顺时针为负;
25、s22、任意泊位的期望靠泊轨迹ξrb(θ(t))=[xrb(θ(t)),yrb(θ(t))]t可得:
26、
27、进一步地,所述步骤s3,具体包括:
28、s31、定义一个3自由度欠驱动船舶的数学模型;
29、s32、对船舶运动学和期望的靠泊轨迹进行坐标转换;
30、s33、设计纵荡运动控制器;
31、s34、设计横荡运动控制器;
32、s35、分析闭环系统的稳定性。
33、进一步地,所述步骤s31,具体包括:
34、s311、定义一个3自由度欠驱动船舶的数学模型,如下:
35、
36、
37、式中,η=[x,y,ψ]t表示船舶的位置和航向,υ=[u,v,r]t表示前进、横漂、首摇的速度;表示船舶速度;m(u)表示惯性矩阵,n(υ,u)包含科里奥利向心矩阵c(υ)υ和阻尼矩阵d(υ,u)υ;d=[du,dv,dr]t表示环境干扰。
38、s312、采用一个执行器模型用于直接控制船舶位置和间接控制航向,具体如下:
39、τ=fk(u)σ
40、式中,表示执行器配置矩阵,l表示首部推进器的力臂;κ1和κ2表示执行器的力系数;σ=[p1|p1|,p2|p2|]t表示控制输入,p表示执行器的螺距比;
41、s313、将步骤s312中的公式进行改写,如下:
42、τ=qσ
43、式中,
44、进一步地,所述步骤s32,具体包括:
45、s321、对船舶运动学和期望的靠泊轨迹进行坐标转换,分别为:
46、zu=x cosψ+y sinψ
47、zv=-x sinψ+y cosψ
48、zru=xrb(θ)cosψ+yrb(θ)sinψ
49、zrv=-xrb(θ)sinψ+yrb(θ)cosψ
50、s322、对步骤s321中的公式两端同时进行求导,得到:
51、
52、
53、
54、进一步地,所述步骤s33,具体包括:
55、s331、定义纵荡运动的误差系统,如下:
56、eu1=zu-zru
57、eu2=u-αu
58、式中,αu表示纵荡运动的虚拟控制律;对步骤s331中的公式两端同时进行求导,得到:
59、
60、s332、定义李雅普诺夫函数,如下:
61、
62、对步骤s332中的公式的两端同时求导,得到:
63、
64、s333、根据步骤s332中求导后的公式,设计αu为:
65、αu=-cu1eu1+ν[xr′(θ)cos(ψ+β)+yr′(θ)sin(ψ+β)]
66、将步骤s333中的公式两端对θ求偏导,得到:
67、αu′=ν′[xr′(θ)cos(ψ+β)+yr′(θ)sin(ψ+β)]+ν[xr″(θ)cos(ψ+β)+yr″(θ)sin(ψ+β)]
68、s334、对步骤s333中设计的αu求导,得到:
69、
70、s335、定义李雅普诺夫函数,如下:
71、
72、对步骤s335中的公式两端同时求导,得到:
73、
74、式中,fu=(1/m11)du,m11和n11表示模型参数;
75、s336、利用模糊逻辑系统逼近fu:
76、
77、则fu的逼近值表示如下:
78、
79、式中,
80、s337、设计纵荡运动的控制输入σu,如下:
81、
82、s338、将步骤s337中的公式代入到步骤s335中求导后的公式中,得到:
83、
84、进一步地,所述步骤s34,具体包括:
85、s341、定义横荡运动的误差系统,如下:
86、ev1=zv-zrv
87、ev2=v-αv
88、式中,αv表示横荡运动的虚拟控制律,对步骤s341中的公式两端同时求导,得到:
89、
90、s342、定义李雅普诺夫函数,如下:
91、
92、对步骤s342中的公式两端同时求导,得到:
93、
94、s343、根据步骤s342中求导后的公式,设计αv,如下:
95、αv=-cv1ev1+ν[-xr′(θ)sin(ψ+β)+yr′(θ)cos(ψ+β)]
96、并将步骤s343中的公式两端对θ求偏导,得到:
97、αv′=ν′[-xr′(θ)sin(ψ+β)+yr′(θ)cos(ψ+β)]+ν[-xr″(θ)sin(ψ+β)+yr″(θ)cos(ψ+β)]
98、s344、对设计的αv的两端同时求导,得到:
99、
100、s345、定义李雅普诺夫函数,如下:
101、
102、并对上式的两端同时求导,得到:
103、
104、式中,fv=(1/m22)dv,m22,n22和n23表示模型参数;
105、s346、利用模糊逻辑系统逼近fv,则fv的逼近值表示如下:
106、
107、式中,
108、s347、设计横荡运动的控制输入σv,如下:
109、
110、将上式代入到步骤s345求导后的公式,得到:
111、
112、进一步地,所述步骤s35,具体包括:
113、s351、定义李雅普诺夫函数,如下:
114、
115、式中μ,λ,γu和γv表示正设计参数,对上式的两端同时求导,得到:
116、
117、s352、根据步骤s351求导后的公式,得到:
118、
119、
120、
121、s353、将步骤s352中的两个公式代入步骤s351求导后的公式,得到:
122、
123、s354、将艏摇方向的零动态表示如下:
124、
125、式中l表示首部推进器的力臂;
126、s355、定义李雅普诺夫函数,如下:
127、
128、对步骤s355中的公式的两端同时求导,得到:
129、
130、式中,m33>0,n23<0,n33>0;则艏摇方向的零动态稳定性取决于l的正负和大小,本发明中l=60/l>0。
131、综上,根据李雅普诺夫理论,闭环系统是稳定的。
132、较现有技术相比,本发明具有以下优点:
133、1、本发明提供的欠驱动船舶自动靠泊控制方法,基于贝塞尔曲线规划、最小二乘拟合和速度分配机制,首次提出了一种新型的轨迹规划策略,为使用反步方法的自动靠泊控制系统提供可导的参考轨迹。
134、2、本发明提供的欠驱动船舶自动靠泊控制方法,相比大多研究只能实现特定位置的自动靠泊控制,本发明提出的新型的大地坐标系和泊位坐标系之间的坐标转换方法,能够实现任意泊位的自动靠泊控制。
135、3、本发明提供的欠驱动船舶自动靠泊控制方法,将模糊逻辑系统引入到反步控制器中逼近未知船舶动态,从而降低浅水和岸壁效应的影响。
136、基于上述理由本发明可在船舶靠泊等领域广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!