一种垂直起降无人机进离场航线设计方法及装置与流程
本发明属于无人机空中交通领域,尤其涉及一种垂直起降无人机进离场航线设计方法及装置。
背景技术:
1、随着电力推进、电子、计算机系统、导航和传感等技术的发展,无人机作为新兴产业之一,近年来在应用领域不断普及,相关空域划分尚未完善,航线划设并未提出,针对垂直电动无人机数量骤增,无人机在农业、军事等各个领域的应用越来越广泛,当在一定起降场空间内同时飞行多架无人机进行相关操作时,无人机起降场将面临四面八方的无人机进离场,无人机在进出起降场时容易发生碰撞危险,如何保证各方向上的多架无人机避免发生碰撞,设计出科学合理的无人机进离场航线是亟待解决的问题。
技术实现思路
1、本发明公开了一种垂直起降无人机进离场航线设计方法,设计出科学合理的无人机进离场航线,解决了大量无人机在进出起降场时容易发生碰撞的问题,本发明采用的技术方案如下:
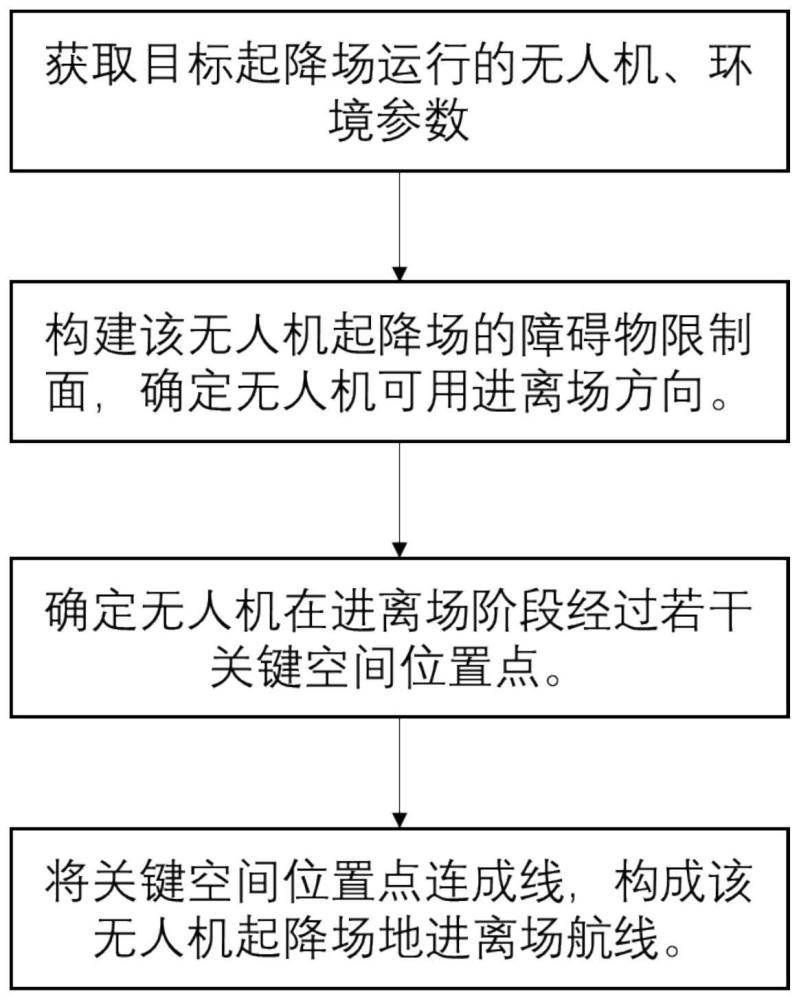
2、一种垂直起降无人机进离场航线设计方法,所述方法包括如下步骤:
3、s1:获取目标起降场运行的无人机参数、环境参数;
4、s2:构建无人机起降场的障碍物限制面,确定无人机可用进离场方向;
5、s3:在所述进离场方向上确定无人机进离场阶段经过的若干关键空间位置点;
6、s4:将关键空间位置点连成线,构成该无人机起降场进离场航线,所述进离场航线包括无人机进场路径和无人机离场路径。
7、进一步地,s1所述无人机参数包括无人机性能参数、机载设备参数、无人机尺寸参数、导航精度,s1所述环境参数包括障碍物空间坐标位置、起降场气象条件和地理位置。
8、进一步地,s2所述可用进离场方向确定步骤为:
9、s2.1根据所述机载设备参数、尺寸参数、导航精度,确定无人机障碍物限制面尺寸参数;
10、s2.2在具有所述环境参数地图的起降场上构建障碍物限制面;
11、s2.3判断起降场周边障碍物高度是否超过障碍物限制面,若超过障碍物限制面,则转入s2.4,若没有超过障碍物限制面,则转入s2.5;
12、s2.4基于障碍物位置判定可用进离场方向范围;
13、s2.5起降场360°方向都可设置为进离场航线。
14、进一步地,s3所述关键空间位置点的确定方法为:
15、s3.1根据起降场气象条件和地理位置确定起降场的进离场方式;
16、s3.2设置关键空间位置点的坐标位置;
17、所述关键空间位置点包括起飞着陆决断点、进离场位置修正点、进场等待点、入航调整点、入航点和脱离航线点。
18、进一步地,所述起飞着陆决断点高度设置为5米至10米;相邻两个所述进离场位置修正点间具有安全间隔;所述进场等待点的高度不小于进离场位置修正点的高度,所述进场等待点的高度低于入航点的高度;所述入航调整点在水平面距离相应的离场位置修正点距离为70-80米;所述入航点为无人机离场路径上的点,所述入航点是无人机离场路径上距离无人机起降场最远的一个点;所述脱离航线点位于平面距离无人机起降场290至300米处,无人机经过脱离航线点到达所述进场等待点之前下降到进场等待点要求的高度。
19、进一步地,s4所述进离场航线的确定步骤为:
20、s4.1确定无人机进离场飞行中依次经过关键空间位置点的顺序;
21、s4.2判断无人机性能参数,确定无人机飞行路线;
22、s4.3依次连接关键空间位置点构成进离场航线,所述进离场航线包括无人机进场路径和无人机离场路径。
23、进一步地,s2.2所述障碍物限制面为三层起降场障碍物限制面,所述三层起降场障碍物限制面设置方法为:
24、s2.2.1起降场空域最接近地面的一层是圆柱体,圆柱体底面半径不少于2倍机身外围直径或停机坪半径加3米,取较大值,高度为所使用的无人机一倍垂直偏航容差,所述圆柱体的空域范围称为起降决断空域;
25、s2.2.2起降场地面以上第二层空域是倒立圆台空域,其底面与起降决断空域的上部相接,在水平方向上往外延伸40米,垂直方向上爬升高度设置为无人机的一倍垂直偏航容差,所述第二层空域称为位置修正空域;
26、s2.2.3起降场地面以上第三层空域,所述第三层空域上层是与航线紧邻的空域,所述第三层空域底面与所述位置修正空域的顶面外围边界相接,在水平方向上往外延伸,在垂直方向上先向上延伸,再往外延伸,形成由倒立圆台和圆环平面组成的空域称为进场空域。
27、进一步地,s2.4所述判定可用进离场方向范围的方法为:从该障碍物外围边界点向连接该起降场的无人机航线作垂线,垂线长度大于两倍机身外围直径,剩余无障碍物穿透部分对应的圆心角不小于30度时,此方向范围为进离场方向范围。
28、进一步地,所述无人机进场路径的空间位置点依次是:脱离航线点、进场等待点、进场位置修正点、着陆决断点、着陆无人机场,所述无人机离场路径的空间位置点依次是:起飞无人机场、起飞决断点、离场位置修正点、入航调整点、入航点。
29、一种垂直起降无人机进离场航线设计装置,所述装置采用上述任一项所述方法进行无人机进离场航线设计。
30、有益效果:
31、本发明提供了一种轻小型多旋翼无人机起降场进离场航线划设方法,该方法能够根据无人机机动性能、导航精度、起降场环境划设无人机进离场航线,保证多架无人机多方向进离场飞行安全、提高低空空域利用率。
32、无人机定位一般以gnss信号为第一导航源的特点,借鉴pbn程序的设计方法,通过在起降点附近设计一系列空间位置点,并根据进离场方向将这些点按顺序分类编码连接的方法构建无人机的进离场航线,能够符合无人机实际特点。
33、进离场位置点的设计考虑了该起降点周边的障碍物情况,考虑了无人机运行时的安全间隔,考虑了在该起降点运行所使用无人机的导航定位容差,也考虑了气象条件对无人机起降的影响,通过以上综合考量,充分保障了无人机在飞行程序上的运行安全。
34、无人机在进离场航线的设计放弃了复杂的障碍物评估,而是用障碍物限制面的方式快速判断,提升程序设计效率。
技术特征:
1.一种垂直起降无人机进离场航线设计方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述一种垂直起降无人机进离场航线设计方法,其特征在于,s1所述无人机参数包括无人机性能参数、机载设备参数、无人机尺寸参数、导航精度,s1所述环境参数包括障碍物空间坐标位置、起降场气象条件和地理位置。
3.根据权利要求2所述一种垂直起降无人机进离场航线设计方法,其特征在于,s2所述可用进离场方向确定步骤为:
4.根据权利要求2所述一种垂直起降无人机进离场航线设计方法,其特征在于,s3所述关键空间位置点的确定方法为:
5.根据权利要求4所述一种垂直起降无人机进离场航线设计方法,其特征在于,所述起飞着陆决断点高度设置为5米至10米;相邻两个所述进离场位置修正点间具有安全间隔;所述进场等待点的高度不小于进离场位置修正点的高度,所述进场等待点的高度低于入航点的高度;所述入航调整点在水平面距离相应的离场位置修正点距离为70-80米;所述入航点为无人机离场路径上的点,所述入航点是无人机离场路径上距离无人机起降场最远的一个点;所述脱离航线点位于平面距离无人机起降场290至300米处,无人机经过脱离航线点到达所述进场等待点之前下降到进场等待点要求的高度。
6.根据权利要求2所述一种垂直起降无人机进离场航线设计方法,其特征在于,s4所述进离场航线的确定步骤为:
7.根据权利要求3所述一种垂直起降无人机进离场航线设计方法,其特征在于,s2.2所述障碍物限制面为三层起降场障碍物限制面,所述三层起降场障碍物限制面设置方法为:
8.根据权利要求3所述一种垂直起降无人机进离场航线设计方法,其特征在于,s2.4所述判定可用进离场方向范围的方法为:从该障碍物外围边界点向连接该起降场的无人机航线作垂线,垂线长度大于两倍机身外围直径,剩余无障碍物穿透部分对应的圆心角不小于30度时,此方向范围为进离场方向范围。
9.根据权利要求7所述一种垂直起降无人机进离场航线设计方法,其特征在于,所述无人机进场路径的空间位置点依次是:脱离航线点、进场等待点、进场位置修正点、着陆决断点、着陆无人机场,所述无人机离场路径的空间位置点依次是:起飞无人机场、起飞决断点、离场位置修正点、入航调整点、入航点。
10.一种垂直起降无人机进离场航线设计装置,所述装置采用如权利要求1-9任一项所述方法进行无人机进离场航线设计。
技术总结
本发明公开了一种垂直起降无人机进离场航线设计方法及装置,属于无人机空中交通领域,该设计方法包括获取目标起降场运行的无人机参数、环境参数,构建无人机起降场的障碍物限制面,确定无人机可用进离场方向,无人机进离场阶段经过若干关键空间位置点,将关键空间位置点连成线构成该无人机起降场地进离场航线等主要步骤,提高了起降场终端空域的利用效率及灵活性,同时有效避免了多架无人机进离场飞行的冲突,充分保障了无人机在飞行程序上的运行安全,具有广阔的应用前景。
技术研发人员:王富贵,全力,龚晶,杨斯,汪善武
受保护的技术使用者:航天时代飞鹏有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!