考虑外部环境干扰的船舶动力定位系统的采样控制方法
本发明涉及现代控制,特别涉及一种考虑外部环境干扰的船舶动力定位系统的采样控制方法。
背景技术:
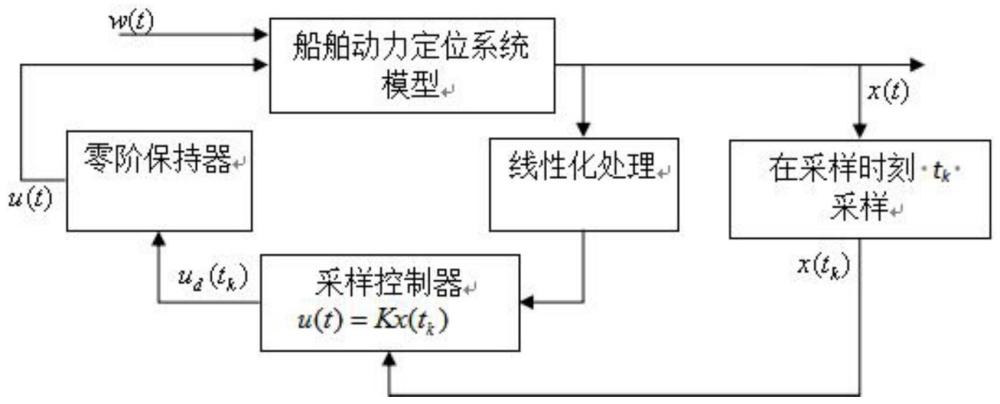
1、船舶动力定位系统是一种采样控制系统,它安装了各种传感器来测量船舶运动状态,例如用于测量船舶位置的全球定位系统、用于测量纵摇、横摇等的姿态传感器、用于测量船舶航向的陀螺罗经以及用于测量船舶加速度的高精度惯性测量单元等,并通过计算机来采集这些传感器信息,再经过采样、量化、零阶保持后输出到动力定位控制器,由推进系统完成船的定位控制任务。目前,对船舶动力系统的研究都是基于单纯的连续或离散系统,对混合离散和连续信号的采样控制系统研究很少,因此,本发明涉及船舶动力定位系统的采样控制问题,具有重要的理论意义和实际应用价值。
技术实现思路
1、针对现有技术中存在技术缺陷或改进需求,本发明的目的在于提供一种考虑外部环境干扰的船舶动力定位系统的采样控制方法。
2、本发明提供的一种考虑外部环境干扰的船舶动力定位系统的采样控制方法,包括:
3、基于运动船舶构建线性化低频运动模型;
4、构建状态反馈采样控制律,采用所述状态反馈采样控制律对所述线性化低频运动模型进行处理得到第一系统模型;
5、采用输入时滞法对所述第一系统模型进行处理得到时变时滞系统模型;
6、基于lyapunov稳定性理论和线性矩阵不等式构造采样控制器模型;
7、将所述采样控制器模型应用至所述时变时滞系统模型中完成船舶变量控制。
8、可选地,基于运动船舶构建线性化低频运动模型的过程包括:
9、获取随船坐标系、大地坐标系和船舶运动自由度;其中,所述自由度包括纵荡、横荡、艏摇角度;
10、基于所述随船坐标系、大地坐标系和船舶运动自由度构建船舶运动模型;
11、基于所述艏摇角度线性化所述船舶运动模型得到线性化低频运动模型。
12、可选地,构建状态反馈采样控制律的过程包括:
13、基于采样周期得到若干采样时刻;
14、基于零阶保持函数和所述采样时刻进行采样得到若干离散控制信号;
15、基于若干所述离散控制信号得到状态反馈采样控制律;
16、其中,所述状态反馈采样控制律的计算公式为:
17、u(t)=kx(tk),tk≤t<tk+1
18、式中,u(t)表示第一控制函数,k表示待设计的控制器增益矩阵,每个采样时刻有u(t)=ud(tk),tk≤t<tk+1,ud表示离散信号,d1表示采样周期的下限,d2表示采样周期的上限。
19、可选地,基于输入时滞法对所述第一系统模型进行处理得到时变时滞系统模型的过程包括:
20、采用所述输入时滞法对所述第一控制函数进行改写得到第二控制函数;
21、将所述第二控制函数输入所述第一系统模型得到时变时滞系统模型;
22、其中,所述时变时滞系统模型的计算公式为:
23、
24、式中,x(t)表示系统状态向量,表示系统状态向量的一阶导数,τ(t)=t-tk,tk≤t<tk+1,0≤τ(t)≤d,τ(t)表示输入时滞,c=[i 0],w表示外界环境干扰,y(t)表示控制系统输出。
25、可选地,所述时变时滞系统模型的渐进稳定条件的计算公式为:
26、
27、
28、其中,p为具有相应维数的正定矩阵,r,z1,z2,z3,q1,q2,q3表示具有相应维数的任意矩阵,a,b,bw为惯性矩阵m和线性水动力系数矩阵d的变换矩阵,k为待设计的控制器矩阵。
29、可选地,构建时变时滞系统模型的过程还包括系统稳定性分析;
30、其中,系统稳定性分析的过程包括:
31、构造lyapunov函数,其中,所述lyapunov函数为正定结果;
32、对所述lyapunov函数进行求导得到导函数;
33、利用jensen不等式和交互式凸组合法对所述导函数处理得到若干积分项不等式结果;
34、将若干所述积分项不等式结果带入所述导函数得到导函数不等式;
35、基于所述导函数不等式和所述渐进稳定条件求schur补得到导函数为常负结果;
36、基于所述导函数的常负结果得到所述时变时滞系统模型为渐进稳定。
37、可选地,构建时变时滞系统模型的过程还包括系统h∞性能分析;
38、其中,当h∞性能指标小于零时,所述时变时滞系统模型满足h∞性能指标。
39、可选地,所述时变时滞系统模型满足h∞性能指标条件的计算公式为:
40、
41、可选地,基于lyapunov稳定性理论和线性矩阵不等式构造采样控制器模型的过程包括:基于所述时变时滞系统模型的渐进稳定条件的计算公式构造采样控制器模型;其中,所述采样控制模型的计算公式为:
42、
43、
44、其中:
45、
46、
47、
48、
49、
50、
51、d21=d2-d1
52、
53、可选地,所述采样控制模型的增益为:
54、本发明具有如下技术效果:
55、稳定性:本发明的技术能够实现基于采样的船舶动力定位系统的稳定性问题。利用输入时滞法和建立的状态反馈采样控制律,将船舶动力定位系统转变为具有时变时滞的系统。通过建立的lyapunov泛函和交互式凸组合不等式,确保系统稳定且获得的结果具有较小的保守性。
56、鲁棒性:本发明的技术具有鲁棒性,系统可以迅速响应外部环境干扰和变化,确保船舶在不同的海洋条件下仍能保持系统状态稳定,减少了操作风险。
57、适用性广泛:本发明的技术不仅适用于不同类型的船舶,还适用于各种环境条件,包括海洋、湖泊和河流等。这使得该技术在商业、军事和科学研究等领域都具有广泛的应用潜力。
58、综上所述,本发明的采样控制技术在船舶动力定位系统上具有显著的技术效果,为航海和船舶运营提供了一种更高效、更稳定、更可靠的解决方案。
技术特征:
1.一种考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,
2.根据权利要求1所述的考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,基于运动船舶构建线性化低频运动模型的过程包括:
3.根据权利要求1所述的考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,构建状态反馈采样控制律的过程包括:
4.根据权利要求3所述的考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,基于输入时滞法对所述第一系统模型进行处理得到时变时滞系统模型的过程包括:
5.根据权利要求4所述的考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,所述时变时滞系统模型的渐进稳定条件的计算公式为:
6.根据权利要求5所述的考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,构建时变时滞系统模型的过程还包括系统稳定性分析;
7.根据权利要求6所述的考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,构建时变时滞系统模型的过程还包括系统h∞性能分析;
8.根据权利要求7所述的考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,所述时变时滞系统模型满足h∞性能指标条件的计算公式为:
9.根据权利要求8所述的考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,基于lyapunov稳定性理论和线性矩阵不等式构造采样控制器模型的过程包括:基于所述时变时滞系统模型的渐进稳定条件的计算公式构造采样控制器模型;其中,所述采样控制模型的计算公式为:
10.根据权利要求9所述的考虑外部环境干扰的船舶动力定位系统的采样控制方法,其特征在于,所述采样控制模型的增益为:
技术总结
本发明公开了一种考虑外部环境干扰的船舶动力定位系统的采样控制方法,包括:基于运动船舶构建线性化低频运动模型;构建状态反馈采样控制律,采用状态反馈采样控制律对线性化低频运动模型进行处理得到第一系统模型;采用输入时滞法对第一系统模型进行处理得到时变时滞系统模型;基于Lyapunov稳定性理论和线性矩阵不等式构造采样控制器模型;将采样控制器模型应用至时变时滞系统模型中完成船舶变量控制。本发明的采样控制技术在船舶动力定位系统上具有显著的技术效果,为航海和船舶运营提供了一种更高效、更稳定、更可靠的解决方案。
技术研发人员:郑敏杰,苏钰涞,李定原,陈前强,王浦,陈国权,邹喆,甘婷
受保护的技术使用者:集美大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!