无人移动靶船自主避障方法及系统与流程
本发明涉及无人移动靶船,具体为无人移动靶船自主避障方法及系统。
背景技术:
1、靶船的作用就是为了测试对舰攻击武器的性能的,准确性,破坏威力等;充当靶船的多数是“退役的”军舰,军用的大型船只等,除了必要的传感器,数据记录仪器和通讯设备,还必须保留船体结构和配重等,舰体的装甲一般也都保留,无人移动靶船具有自主移动的功能,现有的无人移动靶船都具有自主避障的功能,避障是对于外界的阻碍到物体的运动方向的作出各种躲避障碍的动作,并继续打断前的动作,这个过程就是避障,但在现有的无人移动靶船自主避障时不具备对障碍物的位置进行准确识别,在自主避障时容易在发现障碍物时出现提前避让后复位仍然会撞到障碍物,造成避让失败,还会出现避让障碍物距离判定延迟,出现直接撞击障碍物造成无人移动靶船损坏的问题,影响正常工作使用。
技术实现思路
1、本发明的目的在于提供无人移动靶船自主避障方法及系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:无人移动靶船自主避障方法,包括以下步骤:
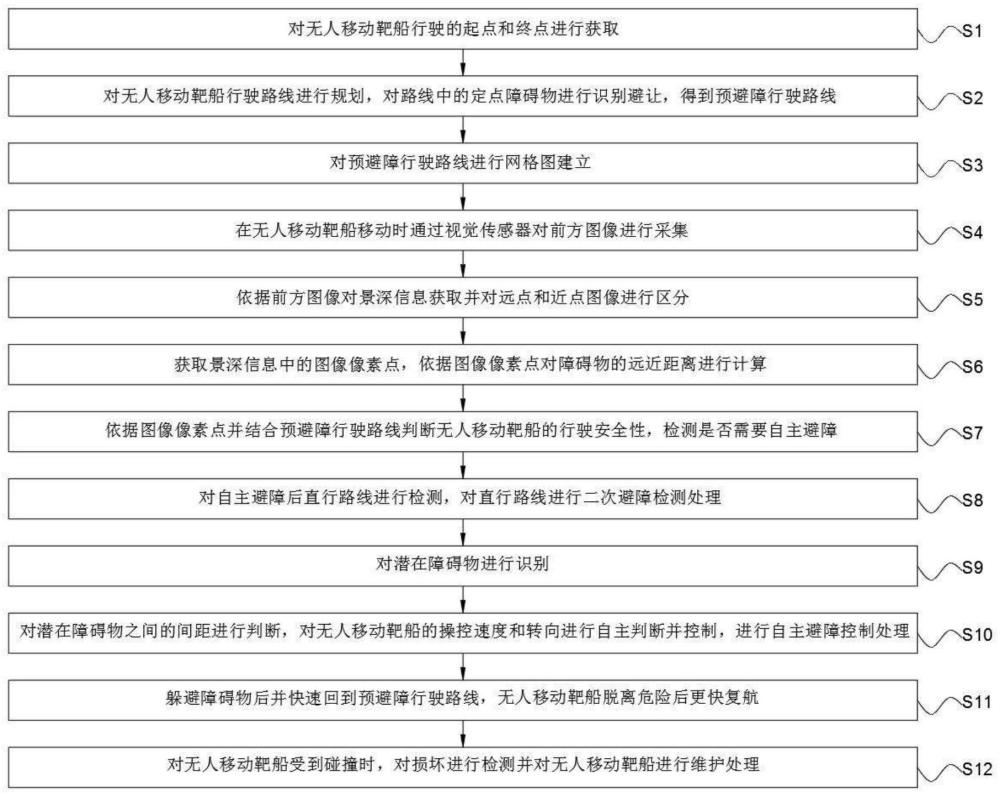
3、s1、对无人移动靶船行驶的起点和终点进行获取;
4、s2、对无人移动靶船行驶路线进行规划,对路线中的定点障碍物进行识别避让,得到预避障行驶路线;
5、s3、对预避障行驶路线进行网格图建立;
6、s4、在无人移动靶船移动时通过视觉传感器对前方图像进行采集;
7、s5、依据前方图像对景深信息获取并对远点和近点图像进行区分;
8、s6、获取景深信息中的图像像素点,依据图像像素点对障碍物的远近距离进行计算;
9、s7、依据图像像素点并结合预避障行驶路线判断无人移动靶船的行驶安全性,检测是否需要自主避障;
10、s8、对自主避障后直行路线进行检测,对直行路线进行二次避障检测处理;
11、s9、对潜在障碍物进行识别;
12、s10、对潜在障碍物之间的间距进行判断,对无人移动靶船的操控速度和转向进行自主判断并控制,进行自主避障控制处理;
13、s11、躲避障碍物后并快速回到预避障行驶路线,无人移动靶船脱离危险后更快复航;
14、s12、对无人移动靶船受到碰撞时,对损坏进行检测并对无人移动靶船进行维护处理。
15、作为优选,所述s2中的对无人移动靶船行驶路线进行规划,对路线中的定点障碍物进行识别避让,得到预避障行驶路线具体包括以下步骤:
16、s21、依据行驶的起点和终点对无人移动靶船行驶的路线进行规划;
17、s22、对规划路线中存在的定点障碍物进行识别,并进行预避障,得到预避障行驶路线。
18、作为优选,所述s3中的对预避障行驶路线进行网格图建立具体包括以下步骤:
19、s31、对无人移动靶船的预避障行驶路线卫星图进行获取;
20、s32、通过预避障行驶路线卫星图对网格地图进行建立,将无人移动靶船的预避障行驶路线在网格地图上进行显示。
21、作为优选,所述s5中的依据前方图像对景深信息获取并对远点和近点图像进行区分具体包括以下步骤:
22、s51、对前方图像中的景深信息进行提取;
23、s52、将前方图像中的景深信息对前方近点图像和远点图像进行区分处理,将需要躲避的障碍物远近图像进行区分。
24、作为优选,所述s6中的获取景深信息中的图像像素点,依据图像像素点对障碍物的远近距离进行计算具体包括以下步骤:
25、s61、对景深信息中的图像像素点进行获取;
26、s62、对获取的各个图像像素点进行赋值,对当前图像中可能存在的障碍物图像进行框选;
27、s63、对框选的障碍物图像的赋值图像像素点进行识别,依据图像像素点对障碍物的位置和距离进行获取。
28、作为优选,所述s8中的对自主避障后直行路线进行检测,对直行路线进行二次避障检测处理具体包括以下步骤:
29、s81、依据景深信息对自主避让后的直行路线进行障碍物检测;
30、s82、躲避当前障碍物后在直行的同时对自主避障路线进行设置,并持续对当前设置的自主避障路线进行障碍物检测。
31、作为优选,所述s9中的对潜在障碍物进行识别具体包括:根据超声波对无人移动靶船前方的潜在障碍物进行识别。
32、作为优选,所述s10中的对潜在障碍物之间的间距进行判断,对无人移动靶船的操控速度和转向进行自主判断并控制,进行自主避障控制处理具体包括以下步骤:
33、s101、判断无人移动靶船与潜在障碍物之间的间距,根据无人移动靶船当前的行驶速度对避障转向的角度进行计算;
34、s102、在判断转向无法避障时,对无人移动靶船进行降速避障处理,调整无人移动靶船的实际车速,进行降速转向避障操作。
35、作为优选,所述s12中的对无人移动靶船受到碰撞时,对损坏进行检测并对无人移动靶船进行维护处理具体包括以下步骤:
36、s121、在无人移动靶船遭到碰撞时进行识别,对碰撞后的无人移动靶船移动状态进行监视;
37、s122、对无人移动靶船的移动速度和坐标位置进行获取,依据移动速度对无人移动靶船的工作状态进行识别;
38、s123、在工作状态异常时,依据无人移动靶船的坐标位置进行就近安排维护处理。
39、无人移动靶船自主避障系统,包括路线规划模块、障碍物识别模块、障碍物避让模块、路线自规划模块和实时检测模块,所述路线规划模块的输出端与障碍物识别模块的输入端通讯连接,所述障碍物识别模块的输出端与障碍物避让模块的输入端通讯连接,所述障碍物避让模块的输出端与路线自规划模块的输入端通讯连接,所述路线自规划模块与实时检测模块双向连接;
40、所述路线规划模块用于对无人移动靶船的行驶路线进行规划处理;
41、所述障碍物识别模块用于对无人移动靶船的前方障碍物进行图像框选,对障碍物位置和距离进行识别处理;
42、所述障碍物避让模块用于对前方识别出的障碍物进行转向和减速避让处理;
43、所述路线自规划模块用于在无人移动靶船避开障碍物后对路线进行重新规划,回到原始行驶路线上;
44、所述实时检测模块用于对无人移动靶船的周围进行超声波检测处理。
45、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
46、与现有技术相比,本发明的有益效果是:通过对预避障行驶路线进行网格图建立,对无人移动靶船的行驶路线进行网格图规划,对整体的行驶路线进行观察,对路线中存在的障碍物进行快速识别,对障碍物进行自主避让处理,通过对景深信息获取,通过景深信息对远近图像进行区分,对障碍物的远近图像进行识别,将障碍物的位置进行判断,保障避障的稳定性,通过对损坏进行检测并对无人移动靶船进行维护处理,方便远程对各个靶船进行维修派单,对靶船的位置进行识别。
- 还没有人留言评论。精彩留言会获得点赞!