一种基于多线激光雷达的商品车整齐停放的装备及方法
本发明涉及机器人转运的商品车密停区整齐停放的方法,尤其涉及一种基于多线激光雷达的商品车整齐停放的装备及方法,属于机器人运动驱动与控制。
背景技术:
1、随着智慧港口建设的推动以及机器人技术、传感器技术及5g通信技术的发展,移动机器人在港口的应用愈加广泛。汽车码头吞吐量巨大,汽车码头需要存放更多的商品车,通过采用商品车密停的方式尽可能地提高汽车码头堆场面积利用率,增多商品车停放数量。目前,商品车密集停放主要采用人力的方式,造成大量的人力资源浪费,同时工作效率低下。商品车的昂贵性和尺寸多样化要求密集停放具有很高的精度和更大的灵活性,目前尚未存在利用移动机器人密集停放商品车的案例。
技术实现思路
1、针对于汽车码头密停区商品车停放效率低下、人力成本高昂的问题,本发明的主要目的是提供一种基于多线激光雷达的商品车整齐停放的装备及方法,通过商品车转运机器人装载的多线激光雷达,采集环境点云信息;并通过对点云信息的处理,实现对商品车转运机器人的运动路径进行纠偏,确定最终停车位置。提高密停区商品车的停放数量,降低劳动强度,提高工作效率和工作精度。
2、本发明的目的是通过如下技术方案实现的:
3、一种基于多线激光雷达的商品车整齐停放的装备,由云端调度系统、商品车转运机器人、装夹系统、环境感知系统及机器人控制系统组成。云端调度系统包含汽车码头的地图信息,用于下达商品车转运机器人的取、放车指令,规划全局路径;商品车转运机器人是一种用于转运商品车的移动机器人;装夹系统装载在商品车转运机器人上,用于装夹待转运商品车;环境感知系统包含安装在转运机器人顶部前方的三维伺服转台、安装在三维伺服转台上的多线激光雷达和安装在商品车转运机器人前方两侧的多线激光雷达。其中,三维伺服转台能够实现多个角度的自由旋转,增大多线激光雷达的检测范围;安装在三维伺服转台上的多线激光雷达用于远距离扫描商品车;安装在商品车转运机器人前方两侧的多线激光雷达能够近距离扫描前方、左右两侧和机器人内部装载的商品车;机器人控制系统用于控制商品车转运机器人运行、与云端调度系统通讯并处理环境感知系统所采集的信息。
4、一种基于多线激光雷达的商品车整齐停放的方法,基于一种基于多线激光雷达的商品车整齐停放的装备实现,包括如下步骤:
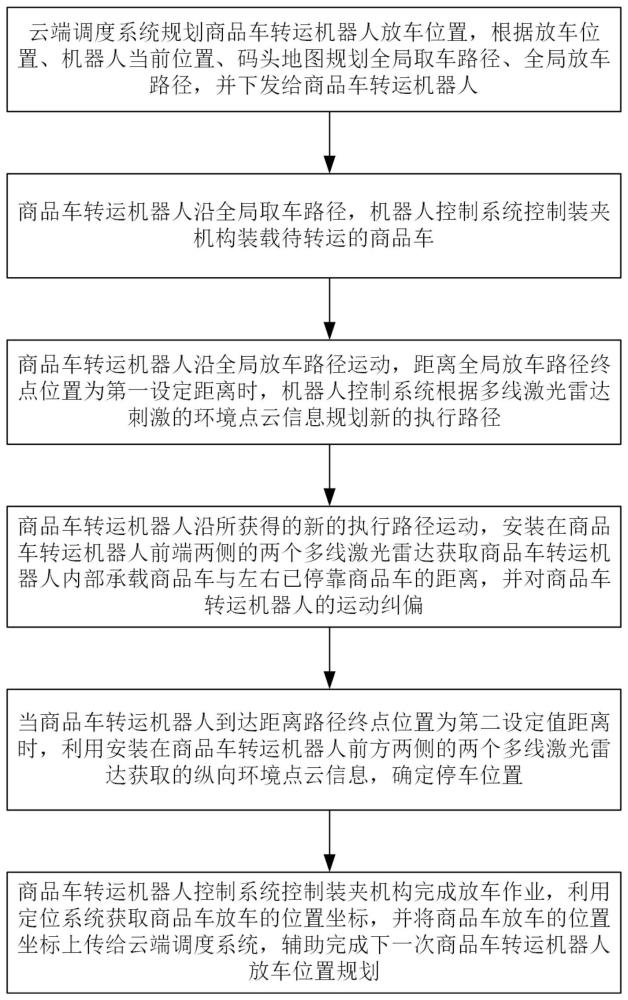
5、步骤1、码头操作系统下发给云端调度系统密停区放车任务信息,任务信息包含商品车尺寸、取车区域位置、密停区放车区域位置。商品车转运机器人上传给云端调度系统车端信息,车端信息包含商品车转运机器人当前位置。如果密停区第一次规划,云端调度系统依据密停区放车任务信息规划商品车转运机器人的本次放车位置、本次取车位置;如果密停区不是第一次规划,云端调度系统依据密停区放车任务信息和商品车转运机器人上次放车位置规划本次放车位置、本次取车位置。云端调度系统利用车端信息、放车位置和取车位置规划商品车转运机器人的全局取车路径和全局放车路径,并将全局取车路径和全局放车路径下发给商品车转运机器人;
6、步骤2、商品车转运机器人接收云端调度系统下发的全局取车路径和全局放车路径,沿全局取车路径到达取车位置,利用装夹机构装载待转运的商品车;
7、步骤3、商品车转运机器人沿全局放车路径运动,距离全局放车路径终点位置为第一设定距离时,机器人控制系统根据安装在商品车转运机器人顶部前方的多线激光雷达采集的环境点云信息规划新的执行路径;
8、3.1、当商品车转运机器人到达距离全局放车路径终点位置为第一设定距离的位置时,机器人停止运动。机器人控制系统控制三维伺服转台,按设定角度值做向下摆头运动。在三维伺服转台摆头的过程中,安装在三维伺服转台的多线激光雷达从上往下时刻采集环境点云信息。三维伺服转台完成摆头后,机器人控制系统将多线激光雷采集的环境点云信息累加,并进行设定范围的范围滤波,只保留商品车转运机器人前方的环境点云信息;
9、3.2、步骤3.1所获得的商品车转运机器人从上往下采集的前方环境点云信息,存在商品车信息,则通过对该环境点云信息进行处理,规划商品车转运机器人新的执行路径。
10、3.2.1、在设定的角度范围内,以1度为步长,遍历所有角度。获取每个角度方向上的商品车点云的矩形框、矩形框面积及矩形框中心位置坐标。
11、3.2.2、选择面积最小的矩形框,并以对应角度作为商品车转运机器人前方商品车的航向角,以面积最小的矩形框的中心位置作为商品车转运机器人前方商品车的位置坐标。
12、3.2.3、机器人控制系统根据商品车转运机器人前方商品车的位置坐标规划一条直线路径作为最后放车路段的放车路径,并替代云端调度系统下发的全局放车路径作为新的执行路径。
13、3.3、步骤3.1所获得的转运机器人前方的环境点云信息,不存在商品车信息,则沿用云端调度下发的全局放车路径作为新的执行路径。
14、步骤4、商品车转运机器人沿步骤3所获得的新的执行路径运动,安装在商品车转运机器人前端两侧的两个多线激光雷达获取商品车转运机器人内部承载商品车与左右已停靠商品车的距离,从而对商品车转运机器人的运动进行纠偏;
15、4.1、安装在商品车转运机器人前端两侧的两个多线激光雷达扫描周围环境,获取环境点云数据,对两个多线激光雷达采集的环境点云数据进行合并,并利用设定范围的范围滤波,分别得到商品车转运机器人内部、前方、左方及右方的点云数据,获取商品车转运机器人周边各个方向的环境信息;
16、4.2、将步骤4.1获取的商品车转运机器人内部、左方及右方的点云合并,获取商品车转运机器人横向方向的环境点云信息;
17、4.3、步骤4.2所获得的商品车转运机器人横向方向的环境点云信息,存在商品车信息,则通过对该环境点云信息进行处理,获取商品车转运机器人空腔内部已承载商品车与左右已停靠商品车的距离,以所述距离获取纠偏量,并将纠偏量添加到商品车转运机器人车轮转角中,使得商品车转运机器人内部商品车与左方或右方已停放商品车保持设定值间距;
18、4.3.1、对于商品车转运机器人横向方向压缩合并之后的点云,只保留合并之后的点云在商品车转运机器人横向方向的坐标值。
19、4.3.2、将坐标值从大到小进行排序,计算每一对相邻坐标值之间的差是否大于设定的距离阈值,如果大于阈值,则表示当前坐标值的点云和前一个坐标值的点云,在商品车转运机器人横向方向不属于同一类;否则,属于同一类。
20、4.3.3、去掉所有类中,点云数量小于设定的最小点云数量的类。
21、4.3.4、其中一个点云的类代表的是商品车转运机器人内部承载的商品车。如果存在其他点云类,则代表商品车转运机器人的左、右方有已停靠商品车;如果不存在其他点云类,则商品车转运机器人的左、右方无已停靠商品车。
22、4.4、步骤4.2所获得的商品车转运机器人横向方向的环境点云信息,不存在商品车信息,则商品车转运机器人继续沿步骤3获得的新的执行路径运动;
23、步骤5、当商品车转运机器人到达距离路径终点位置为第二设定值距离时,安装在商品车转运机器人前方两端的多线激光雷达获取商品车转运机器人内部承载商品车与左右已停靠商品车的距离,从而确定商品车转运机器人停车位置;
24、5.1、将步骤4.1获取的商品车转运机器人内部、前方的点云合并,获取商品车转运机器人纵向方向的环境点云信息。
25、5.2、步骤5.1所获得的商品车转运机器人纵向方向的环境点云信息,存在商品车信息,则通过对该环境点云信息进行处理,获取商品车转运机器人内部承载商品车距离前方停靠商品车的距离,从而确定商品车转运机器人停车位置;
26、5.2.1、对于商品车转运机器人纵向方向压缩合并之后的点云,只保留合并之后的点云在商品车转运机器人纵向方向的坐标值。
27、5.2.2、将坐标值从大到小进行排序,计算每一对相邻坐标值之间的差是否大于设定的距离阈值,如果大于阈值,表示当前坐标值的点云和前一个坐标值的点云在商品车转运机器人横向方向不属于同一类;否则,属于同一类。
28、5.2.3、去掉点云数量小于设定的最小点云数量的类。其中一个点云的类代表的是商品车转运机器人内部承载的商品车。如果存在其他点云类,则代表的是商品车转运机器人前方的商品车;如果不存在其他点云类,则代表的是商品车转运机器人前方不存在已停靠商品车;
29、5.2.4、计算商品车转运机器人内部商品车与前方商品车的当前距离,并与要求密停区前后商品车间距做差,获取商品车转运机器人需要继续前进的距离,控制商品车转运机器人运动需要前进的距离之后,控制商品车转运机器人停止运动;
30、5.3、步骤5.1所获得的商品车转运机器人纵向方向的环境点云信息,不存在商品车信息,则当商品车转运机器人到达全局放车路径终点时,商品车转运机器人控制系统控制商品车转运机器人停止运动;
31、步骤6、商品车转运机器人控制系统控制装夹机构完成放车作业,利用定位系统获取商品车放车的位置坐标,并将商品车放车的位置坐标上传给云端调度系统,完成一次放车作业。提高密停区商品车的停放数量,降低劳动强度,提高工作效率和工作精度。
32、有益效果:
33、1、本发明公开的一种基于多线激光雷达的商品车整齐停放的装备及方法,采用云端引导车端,车端反馈云端的方式,云端规划放车位置,车端到达放车位置后反馈云端,辅助云端规划下一辆商品车的停车位置,实现商品车转运机器人通过云端和车端协同规划,保证商品车转运机器人整齐放车。
34、2、本发明公开的一种基于多线激光雷达的商品车整齐停放的装备及方法,在商品车转运机器人到达密停区之后,不依赖云端数据,自主判断放车位置,通过远距离对前方已停靠商品车定位定向,中间路段依据左右两边已停靠商品车进行纠偏、近距离依据与前方已停靠商品车的距离控制停车的方式,使得商品车转运机器人停放商品车与周围商品车保持指定间距,同时又与前方商品车对齐,进一步保证了密停区商品车停放的整齐度。
35、3、本发明公开的一种基于多线激光雷达的商品车整齐停放的装备及方法,将安装在商品车转运机器人前方两侧的两个多线激光雷达扫描的环境点云信息合并,并进行范围滤波,分别获取商品车转运机器人内部、前方和左右两侧的环境信息,实现对商品车转运机器人周围环境的范围划分,从而将商品车转运机器人前方、左右两侧已停靠商品车进行位置分类,提高商品车停放的精度。
36、4、本发明公开的一种基于多线激光雷达的商品车整齐停放的装备及方法,将获取的点云数据在指定方向进行压缩,将点云数据转化为一维,获取坐标值,通过判断相邻坐标值的距离差是否大于设定值,由于商品车体积比较大,进一步消除所有类中点云数量小于设定值的类,实现在特定方向对点云分析,并降低计算负担,提高停放效率。
37、5、本发明公开的一种基于多线激光雷达的商品车整齐停放的装备及方法,密停区要求前后两个商品车距离很小,当商品车转运机器人内部的商品车和前方商品车的距离过近时,安装在商品车转运机器人前方两侧的两个多线激光雷达不在商品车转运机器人内部商品车与前方商品车之间位置,多线激光雷达无法清晰扫描商品车转运机器人前方商品车的车头,通过远距离扫描商品车转运机器人内部商品车与前方商品车的距离,进而控制商品车转运机器人运动当前距离与目标距离的差值大小的距离,实现商品车转运机器人内部商品车与前方商品车保持精确距离。
- 还没有人留言评论。精彩留言会获得点赞!