复杂障碍物环境下基于DIBNN的多机器人协同区域搜索方法
本发明属于机器人区域搜索,特别是涉及一种复杂障碍物环境下基于dibnn的多机器人协同区域搜索方法。
背景技术:
1、多机器人系统是近年来机器人研究领域的一个热点,与单个机器人相比,多机器人系统在大规模环境探测、目标搜索等任务中具有协同性、并行性和鲁棒性等优点。例如,在一些时间敏感的情况下,如救援行动,多机器人系统可以帮助用户在有限的时间快速定位被困人员。此外,在非结构化环境中,少数机器人的损坏并不显著影响多机器人系统环境探测任务的完成。由于通信拓扑的连通性和充分的信息共享,多机器人系统可以有效地提高环境探测和目标搜索任务的效率。通常情况下,大多数环境探测和目标搜索任务需要机器人探索所有未搜索区域,这就提出了未知环境下的区域搜索问题。未知环境通常是指特定区域内的障碍物和目标信息部分未知或完全未知的情况。在多机器人协作区域搜索框架中,每个机器人首先对自身和其他机器人获得的环境信息进行整合,然后据此进行运动规划。在区域搜索过程中,基于实时环境信息确定机器人下一步运动位置的决策步骤十分关键。此外,由于未知环境的存在,每个机器人在决策过程中还必须考虑各种约束,如避障、避碰、减少重复搜索等。此外,很多非结构化环境通常具有复杂的障碍物。因此,未知环境下的多机器人区域搜索任务往往比已知环境下的传统区域搜索任务更具挑战性。
2、目前虽然有部分研究对未知环境下多机器人区域搜索方法进行了探讨,但是主要针对简单障碍物环境。当多机器人系统在复杂障碍物环境下进行区域搜索任务时,机器人容易陷于局部死锁状态,即机器人长期停留在某一片区域,无法运动至剩余的未探索区域。对于多机器人系统而言,如何在复杂障碍物下保持高效的搜索效率仍然是当前区域搜索技术研究的一个难点。因此,针对多机器人系统在复杂障碍物环境下执行区域搜索任务容易陷入局部死锁,从而导致多机器人区域搜索效率下降的问题,我们提出了一种基于dibnn的复杂障碍物环境下的多机器人协同区域搜索方法。
技术实现思路
1、针对以上技术问题,本发明提供复杂障碍物环境下基于dibnn的多机器人协同区域搜索方法。
2、本发明解决其技术问题采用的技术方案是:
3、复杂障碍物环境下基于dibnn的多机器人协同区域搜索方法,所述方法包括以下步骤:
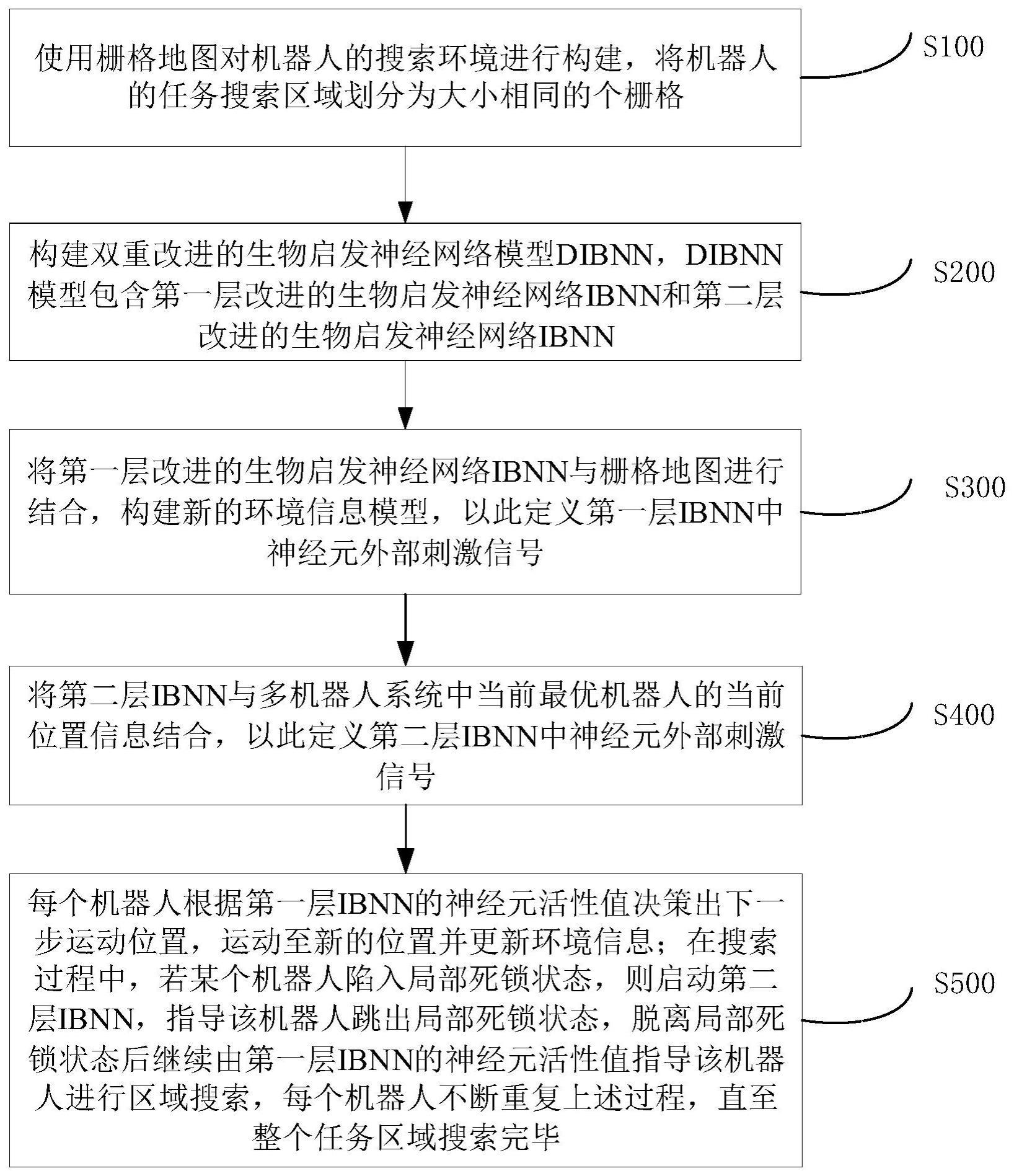
4、s100:使用栅格地图对机器人的搜索环境进行构建,将机器人的任务搜索区域划分为大小相同的h1*h2个栅格;
5、s200:构建双重改进的生物启发神经网络模型dibnn,dibnn模型包含第一层改进的生物启发神经网络ibnn和第二层改进的生物启发神经网络ibnn;
6、s300:将第一层改进的生物启发神经网络ibnn与栅格地图进行结合,构建新的环境信息模型,以此定义第一层ibnn中神经元外部刺激信号;
7、s400:将第二层ibnn与多机器人系统中当前最优机器人的当前位置信息结合,以此定义第二层ibnn中神经元外部刺激信号;
8、s500:每个机器人根据第一层ibnn的神经元活性值决策出下一步运动位置,运动至新的位置并更新环境信息;在搜索过程中,若某个机器人陷入局部死锁状态,则启动第二层ibnn,指导该机器人跳出局部死锁状态,脱离局部死锁状态后继续由第一层ibnn的神经元活性值指导该机器人进行区域搜索,每个机器人不断重复上述过程,直至整个任务区域搜索完毕。
9、优选地,s100具体为:
10、栅格的状态包括未搜索栅格、障碍物栅格以及自由的栅格,构建的栅格地图的状态表示如下所示:
11、
12、其中,s{g(x,y)}表示栅格g(x,y)的状态,g(x,y)表示位置为(x,y)的栅格,x∈[1,h1],y∈[1,h2];ku表示g(x,y)是未搜索栅格,ko表示g(x,y)是障碍物栅格,kc表示g(x,y)是自由的栅格。
13、优选地,s200中ibnn的神经元活性值特性如式(2)所示:
14、
15、其中,ii表示神经元i接收的外部刺激信号,[ii]+=max(ii,0),[ii]-=max(-ii,0),表示激励输入,[ii]-表示抑制输入,φj表示与神经元i相邻的神经元j的活性值,a、b、d均为正值常数,mr表示神经元i相邻的神经元个数,mp表示神经元i相邻的具备正活性值神经元的数目,wij表示第i个神经元与其相连的神经元的连接系数,如式(3)所示:
16、
17、其中|ei-ej|表示状态空间上的向量ei和ej之间的欧式距离,α和r均为正值常数。
18、优选地,s300具体为:
19、
20、其中表示第一层ibnn在(x,y)位置第i个神经元的外部刺激信号,k是一个正实数,取值范围是[3,6]。
21、优选地,s400具体为:
22、
23、其中表示的是第二层ibnn在(x,y)位置第i个神经元的外部刺激信号,e为一个正实数,取值范围是[2,6],rt表示当前最优机器人。
24、优选地,s500包括:
25、s510:启动第一层ibnn:获取机器人的当前位置,根据机器人的当前位置和周围神经元的活性值决定机器人的下一位置;
26、s520:判断是否存在机器人处于局部死锁状态,若存在机器人陷入了局部死锁状态,则进入启动第二层ibnn,否则,继续由第一层ibnn指导机器人的区域搜索任务;
27、s530:启动第二层ibnn:在存在机器人陷入局部死锁状态后,确定多机器人系统中的最优机器人,在陷入局部死锁状态的机器人达到最优机器人所在位置,脱离局部死锁状态;
28、s540:继续由第一层ibnn的神经元活性值指导机器人进行区域搜索任务,每个机器人不断重复上述过程,直至整个任务区域搜索完毕。
29、优选地,s510具体为:
30、假设机器人当前位置为pc,机器人的下一个位置为pn由机器人的当前位置pc以及周围神经元的活性值决定,如式(6)所示:
31、
32、其中是第一层ibnn中当前的机器人所在位置对应神经元中周围的第j个神经元的活性值,mr表示相邻的神经元个数,c1是一个正常数,表示机器人当前位置与下一位置方向之差,δθj是当前移动方向与下一移动方向的转角差;
33、若上一步位置pp=(xp,yp),当前位置pc=(xc,yc),下一步位置pn=(xn,yn),则δθj的定义如式(7)所示:
34、δθj=|θj-θc|=|atan2(yn-yc,xn-xc)-atan2(yc-yp,xc-xp)| (7)
35、其中,θc是当前移动方向与上一移动方向的转角差,θj是下一移动方向与当前移动方向的转角差。
36、优选地,s520具体为:
37、若某个机器人rm周围的未搜索面积小于预设面积阈值,且持续时间tl超过用户设定的时间阈值tm,则确定该机器人陷入了局部死锁状态,局部死锁状态的判定方法如式(8)所示:
38、
39、其中,lo(rm)表示机器人当前的状态,1表示机器人处于局部死锁状态,0表示正常状态,为机器人rm周围半径ro内未搜索区域的面积,δ1∈(0,1)。
40、优选地,s530具体为:
41、
42、其中rt表示rm选择的最优机器人,为机器人rs周围半径ro内周围半径未搜索的区域的大小,nr为机器人的数量;
43、之后机器人rm选择第二层ibnn中活性值最大的神经元所在位置进行移动,并确定下一步位置pn,如式(10)所示:
44、
45、其中是机器人所在位置对应神经元周围的第j个神经元的活性值,mr表示相邻的神经元个数;
46、重复公式(10)继续确定下一步位置,直至机器人rm达到最优机器人rt所在位置,脱离局部死锁状态。
47、本发明旨在解决多机器人系统在复杂障碍物环境下执行区域搜索任务容易陷入局部死锁,从而导致多机器人区域搜索效率下降的问题,设计了一种复杂障碍物环境下基于dibnn的多机器人协同区域搜索方法。该方法的主要内容如下:1.提出了一种双重改进的生物启发神经网络dibnn模型,包含两层改进的生物启发神经网络ibnn,将第一层将ibnn与栅格地图状态进行结合,构建新的环境信息模型,同时将第二层ibnn与多机器人系统中最优机器人的位置信息结合。2.在dibnn模型基础上设计了一种多机器人协同区域搜索机制——每个机器人根据第一层ibnn的神经元活性值决策出下一步运动位置,运动至新的位置并更新环境信息;在搜索过程中,如果某个机器人陷入局部死锁状态,则启动第二层ibnn,指导该机器人跳出局部死锁状态;脱离局部死锁状态后继续由第一层ibnn的神经元活性值指导机器人进行区域搜索,每个机器人不断重复上述过程,直至整个任务区域搜索完毕。有效提高了多机器人区域搜索效率。
- 还没有人留言评论。精彩留言会获得点赞!