一种自稳系统控制方法、装置、设备及存储介质与流程
本发明涉及惯性稳定平台测量控制,尤其涉及一种自稳系统控制方法、装置、设备及存储介质。
背景技术:
1、自稳系统是一种通过传感器来感测设备的角度和速度变化,并由控制器根据这些信息控制设备的运动,以保持其稳定的系统。自稳系统通常包括传感器、控制器和执行器三个主要部分。
2、由于自稳系统可以保证被挂载设备在载体移动时的自身稳定,因而在各种挂载作业中被广泛使用,例如光电吊舱在飞行器上的挂载作业、电影摄像机在特种拍摄车辆上的挂载作业、水文测量仪在轮船上的挂载作业等
3、在挂载作业中,自稳系统的执行器通常是双轴电机或三轴电机,双轴电机可以在两个方向上分别通过转动在载体移动时保持被挂载设备的稳定,避免其正常作业受到载体移动的影响;三轴电机可以在三个方向上分别通过转动在载体移动时保持被挂载设备的稳定,避免其正常作业受到载体移动的影响。自稳系统的传感器通常包括与电机同轴的陀螺仪和电机的编码器,两者所测得的电机角度数据和电机速度角度作为控制器的输入,为控制器控制电机提供准确的参考数据。
4、随着挂载作业的长时间进行以及被挂载设备与载体之间的晃动,传感器(尤其是陀螺仪)的自身误差会不断积累,导致所测得的电机角度数据出现偏差,控制器无法根据偏差的角度数据来对电机做出正确控制,这使得自稳系统的控制精度下降、甚至无法保证被挂载设备在挂载作业时的稳定。
技术实现思路
1、本发明提供了一种自稳系统控制方法、装置、设备及存储介质,以提高自稳系统控制精度。
2、根据本发明的一方面,提供了一种自稳系统控制方法,自稳系统包括陀螺仪、电机和电机编码器,所述的陀螺仪和电机彼此同轴设置,所述电机包括俯仰电机和航向电机,方法包括:
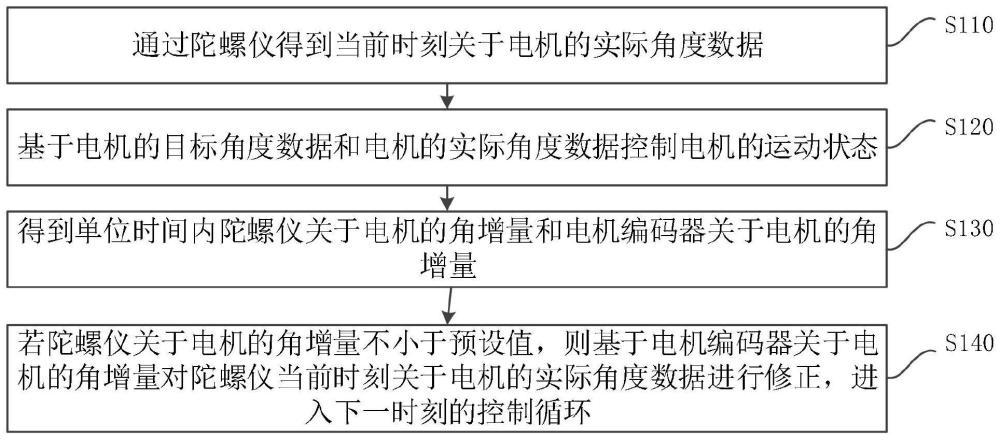
3、通过陀螺仪得到当前时刻关于电机的实际角度数据;
4、基于电机的目标角度数据和电机的实际角度数据控制电机的运动状态;
5、得到单位时间内陀螺仪关于电机的角增量和电机编码器关于电机的角增量;
6、若陀螺仪关于电机的角增量不小于预设值,则基于电机编码器关于电机的角增量对陀螺仪当前时刻关于电机的实际角度数据进行修正,进入下一时刻的控制循环。。
7、根据本发明的另一方面,提供了一种自稳系统控制装置,自稳系统包括陀螺仪、电机和电机编码器,所述的陀螺仪和电机彼此同轴设置,所述电机包括俯仰电机和航向电机,装置包括:
8、实际角度获取模块,用于通过陀螺仪得到当前时刻关于电机的实际角度数据;
9、运动状态控制模块,用于基于电机的目标角度数据和电机的实际角度数据控制电机的运动状态;
10、角增量获取模块,用于得到单位时间内陀螺仪关于电机的角增量和电机编码器关于电机的角增量;
11、陀螺仪修正模块,用于若陀螺仪关于电机的角增量不小于预设值,则基于电机编码器关于电机的角增量对陀螺仪当前时刻关于电机的实际角度数据进行修正,进入下一时刻的控制循环。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的自稳系统控制方法。
16、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的自稳系统控制方法。
17、本发明实施例通过内部参照系的角度数据,周期性地在陀螺仪因大幅转动而可能出现漂移时,对以其准的外部参照系的实际角度数据进行修正,降低其漂移几率和因漂移带来的误差。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种自稳系统控制方法,其特征在于,自稳系统包括陀螺仪、电机和电机编码器,所述的陀螺仪和电机彼此同轴设置,所述电机包括俯仰电机和航向电机;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于电机的目标角度数据和电机的实际角度数据控制电机的运动状态,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于电机的目标角度数据和电机的实际角度数据得到电机的目标速度,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于角度偏差e和角度偏差的变化率c得到模糊系数p和积分系数i,包括:
5.根据权利要求3所述的方法,其特征在于,所述基于角度偏差e和角度偏差的变化率c得到模糊系数p和积分系数i,包括:
6.根据权利要求2至5中任一权利要求所述的方法,其特征在于,所述基于电机的目标速度控制电机的运动状态,包括:
7.根据权利要求6所述的方法,其特征在于,所述基于电机的速度偏差ek控制电机的运动状态,包括:
8.根据权利要求1、2、3、4、5或7所述的方法,其特征在于,所述若陀螺仪关于电机的角增量不小于预设值,则基于电机编码器关于电机的角增量对陀螺仪当前时刻关于电机的实际角度数据进行修正,包括:
9.一种自稳系统控制装置,其特征在于,自稳系统包括陀螺仪、电机和电机编码器,所述的陀螺仪和电机彼此同轴设置,所述电机包括俯仰电机和航向电机;所述装置包括:
10.一种电子设备,其特征在于,所述电子设备包括:
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-8中任一项所述的自稳系统控制方法。
技术总结
本发明公开了一种自稳系统控制方法、装置、设备和存储介质。该方法包括:通过陀螺仪得到当前时刻关于电机的实际角度数据;基于电机的目标角度数据和电机的实际角度数据控制电机的运动状态;得到单位时间内陀螺仪关于电机的角增量和电机编码器关于电机的角增量;若陀螺仪关于电机的角增量不小于预设值,则基于电机编码器关于电机的角增量对陀螺仪当前时刻关于电机的实际角度数据进行修正,进入下一时刻的控制循环。本发明实施例可以提高自稳系统控制精度。
技术研发人员:韩勇,严征
受保护的技术使用者:深圳市镭神智能系统有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!