基于快速原型的实车测试方法、装置、电子设备及介质与流程
本技术涉及车辆测试,特别涉及一种基于快速原型的实车测试方法、装置、电子设备及介质。
背景技术:
1、随着自动驾驶车辆的快速发展,自动驾驶测试技术便成为安全驾驶的保证,其中,对于轨迹跟踪的控制算法测试更是用户普遍所需求的,完善的控制算法可以更加精确的跟踪客户的预设路径,且在一定程度上会降低人为因素造成的交通事故,因此,为了保证车辆在运行过程中的安全与可靠性,对车辆进行大量的测试与评价十分重要。
2、相关技术中,大多采用基于microauto box快速原型设备或canape(canapplication programming environment,can应用程序编程环境)快速原型实现方法进行实车测试,并在控制系统开发的初期,把microauto box专用硬件作为控制算法及控制逻辑代码的硬件运行环境,根据产品开发流程,控制算法在等待上游规划算法输入完善时,即可开展控制模型进行实车测试。
3、然而,通过上述方法在实车测试过程中会存在以下弊端:(1)严格遵循开发流程会导致项目开发周期较长、控制算法在开发前期不能有效开展验证,因而会缺乏必要得可靠性,影响项目进度;(2)microauto box快速原型设备及相应软件价格昂贵,易造成开发成本过高;(3)采用microauto box或canape快速原型实现方法,仍需等待上游路径规划算法完善时才能开展实车测试,从而造成控制算法验证等待时期也较长,亟需解决。
技术实现思路
1、本技术提供一种基于快速原型的实车测试方法、装置、电子设备及介质,以解决车辆在测试过程中因上游规划算法不完善,且无规划路径输入,从而导致测试流程周期长、可靠性低以及开发成本高等问题。
2、本技术第一方面实施例提供一种基于快速原型的实车测试方法,包括以下步骤:
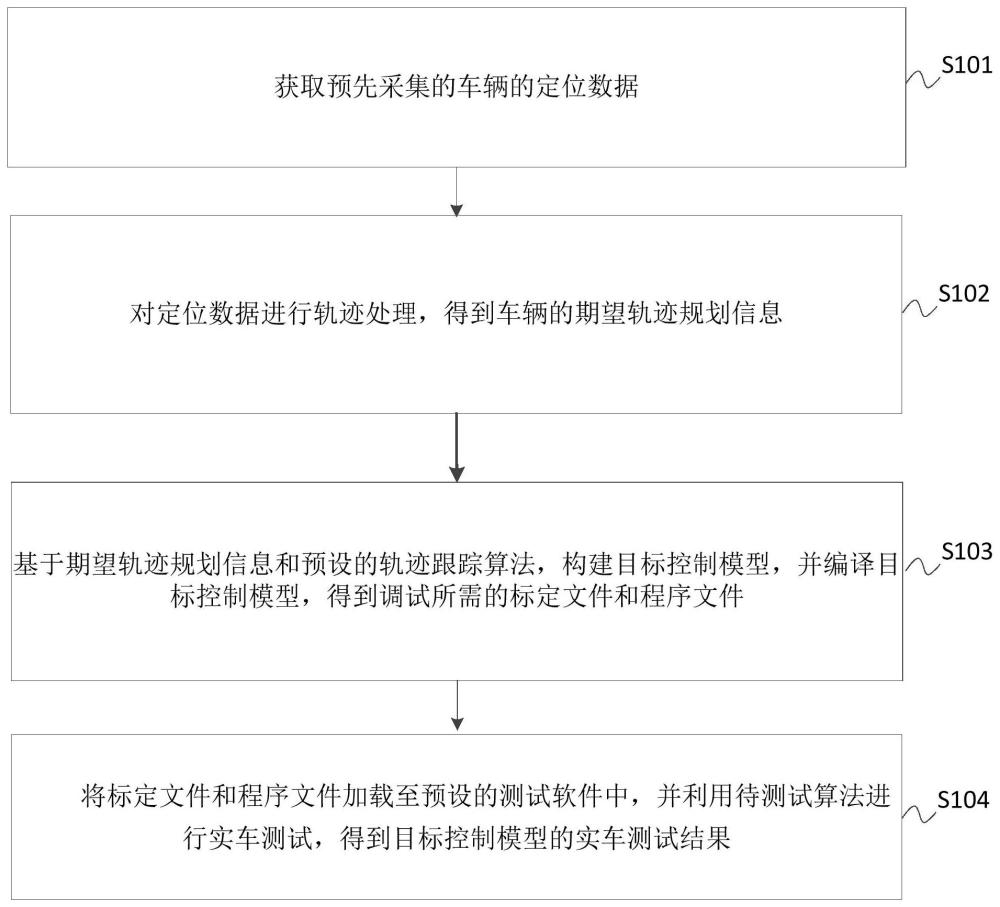
3、获取预先采集的车辆的定位数据;
4、对所述定位数据进行轨迹处理,得到所述车辆的期望轨迹规划信息;
5、基于所述期望轨迹规划信息和预设的轨迹跟踪算法,构建目标控制模型,并编译所述目标控制模型,得到调试所需的标定文件和程序文件;以及
6、将所述标定文件和所述程序文件加载至预设的测试软件中,并利用待测试算法进行实车测试,得到所述目标控制模型的实车测试结果。
7、根据本技术的一个实施例,所述对所述定位数据进行轨迹处理,得到所述车辆的期望轨迹规划信息,包括:
8、基于预设的坐标转换算法,将所述定位数据转换至utm((universal transversemercator grid system,通用横墨卡托格网系统))坐标系,得到utm定位数据;
9、基于预设的轨迹处理策略,对所述utm定位数据进行轨迹平滑处理,并根据处理后的所述utm定位数据计算得到所述车辆的期望轨迹规划信息。
10、根据本技术的一个实施例,所述基于所述期望轨迹规划信息和所述预设的轨迹跟踪算法,构建目标控制模型,包括:
11、基于所述车辆的期望轨迹规划信息,利用所述预设的轨迹跟踪算法分别对所述车辆进行纵向加速度跟随控制和横向方向盘转角跟随控制,得到所述车辆的加速度跟随信息和方向盘转角跟随信息;
12、根据所述车辆的期望轨迹规划信息、所述加速度跟随信息和所述方向盘转角跟随信息完善所述目标控制模型的输入模块,并根据所述预设的完善策略完善所述目标控制模型的输出模块,得到所述目标控制模型。
13、根据本技术的一个实施例,在得到所述车辆的加速度跟随信息和方向盘转角跟随信息之后,还包括:
14、基于所述车辆的加速度跟随信息验证所述车辆的纵向控制算法,得到所述车辆的纵向控制算法效果;
15、基于所述车辆的方向盘转角跟随信息验证所述车辆的横向控制算法,得到所述车辆的横向控制算法效果。
16、根据本技术的一个实施例,所述根据所述车辆的期望轨迹规划信息、所述加速度跟随信息和所述方向盘转角跟随信息完善所述目标控制模型的输入模块,并根据所述预设的完善策略完善所述目标控制模型的输出模块,包括:
17、获取所述车辆的目标输入信息;
18、基于所述目标输入信息,根据所述纵向控制算法计算所述车辆的目标加速度信息,以及根据所述横向控制算法计算所述车辆的方向盘转角信息;
19、根据所述方向盘转角信息计算所述方向盘转角的控制帧,以及根据所述目标加速度信息计算所述目标加速度的控制帧,分别得到所述方向盘转角控制帧和所述目标加速度控制帧;
20、根据预设的完善输出策略将所述方向盘转角控制帧和所述目标加速度控制帧转换成控制模型所需要的格式输出;
21、利用eps(electric power steering,电动助力转向系统)接收所述车辆的方向盘转角指令,以及利用esp(electronic stability program,车身电子稳定系统)接收所述车辆的目标加速度指令,以根据所述方向盘转角控制帧和所述目标加速度控制帧控制所述车辆进行实车测试。
22、根据本技术的一个实施例,在采集所述车辆的定位数据之后,还包括:
23、采集所述车辆的底盘数据和挡位信息;
24、基于所述车辆的定位数据、底盘数据和挡位信息控制所述车辆进行调试。
25、根据本技术实施例的基于快速原型的实车测试方法,通过对获取的车辆定位数据进行轨迹处理,得到车辆将要跟踪的期望轨迹规划信息,基于期望轨迹规划信息和预设的轨迹跟踪算法,构建目标控制模型并编译,得到调试所需的标定文件和程序文件,同时将文件加载至预设的测试软件,并利用待测试算法进行实车测试,得到目标控制模型的实车测试结果。由此,解决了车辆在测试过程中因上游规划算法不完善,且无规划路径输入,从而导致测试流程周期长、可靠性低以及开发成本高等问题,通过引入轨迹采集和循迹控制思想,使控制模型能够提前开展验证,并且能够实现在跟踪不同场景的轨迹时验证多场景下的跟踪效果。
26、本技术第二方面实施例提供一种基于快速原型的实车测试装置,包括:
27、获取模块,用于获取预先采集的车辆的定位数据;
28、预处理模块,用于对所述定位数据进行轨迹处理,得到所述车辆的期望轨迹规划信息;
29、构建模块,用于基于所述期望轨迹规划信息和预设的轨迹跟踪算法,构建目标控制模型,并编译所述目标控制模型,得到调试所需的标定文件和程序文件;以及
30、测试模块,用于将所述标定文件和所述程序文件加载至预设的测试软件中,并利用待测试算法进行实车测试,得到所述目标控制模型的实车测试结果。
31、根据本技术的一个实施例,所述预处理模块,具体用于:
32、基于预设的坐标转换算法,将所述定位数据转换至utm坐标系,得到utm定位数据;
33、基于预设的轨迹处理策略,对所述utm定位数据进行轨迹平滑处理,并根据处理后的所述utm定位数据计算得到所述车辆的期望轨迹规划信息。
34、根据本技术的一个实施例,所述构建模块,具体用于:
35、基于所述车辆的期望轨迹规划信息,利用预设的轨迹跟踪算法分别对所述车辆进行纵向加速度跟随控制和横向方向盘转角跟随控制,得到所述车辆的加速度跟随信息和方向盘转角跟随信息;
36、根据所述车辆的期望轨迹规划信息、所述加速度跟随信息和所述方向盘转角跟随信息完善所述目标控制模型的输入模块,并根据所述预设的完善策略完善所述目标控制模型的输出模块,得到所述目标控制模型。
37、根据本技术的一个实施例,在得到所述车辆的加速度跟随信息和方向盘转角跟随信息之后,所述构建模块,还用于:
38、基于所述车辆的加速度跟随信息验证所述车辆的纵向控制算法,得到所述车辆的纵向控制算法效果;
39、基于所述车辆的方向盘转角跟随信息验证所述车辆的横向控制算法,得到所述车辆的横向控制算法效果。
40、根据本技术的一个实施例,所述构建模块,具体用于:
41、获取所述车辆的目标输入信息;
42、基于所述目标输入信息,根据所述纵向控制算法计算所述车辆的目标加速度信息,以及根据所述横向控制算法计算所述车辆的方向盘转角信息;
43、根据所述方向盘转角信息计算所述方向盘转角的控制帧,以及根据所述目标加速度信息计算所述目标加速度的控制帧,分别得到所述方向盘转角控制帧和所述目标加速度控制帧;
44、根据预设的完善输出策略将所述方向盘转角控制帧和所述目标加速度控制帧转换成目标控制模型所需要的格式输出;
45、利用eps接收所述车辆的方向盘转角指令,以及利用esp接收所述车辆的目标加速度指令,以根据所述方向盘转角控制帧和所述目标加速度控制帧控制所述车辆进行实车测试。
46、根据本技术的一个实施例,在获取预先采集的所述车辆的定位数据之后,所述获取模块,还用于:
47、采集所述车辆的底盘数据和挡位信息;
48、基于所述车辆的定位数据、底盘数据和挡位信息控制所述车辆进行调试。
49、根据本技术实施例的基于快速原型的实车测试装置,通过对获取的车辆定位数据进行轨迹处理,得到车辆将要跟踪的期望轨迹规划信息,基于期望轨迹规划规划信息和预设的轨迹跟踪算法,构建目标控制模型并编译,得到调试所需的标定文件和程序文件,同时将文件加载至预设的测试软件,并利用待测试算法进行实车测试,得到目标控制模型的实车测试结果。由此,解决了车辆在测试过程中因上游规划算法不完善,且无规划路径输入,从而导致测试流程周期长、可靠性低以及开发成本高等问题,通过引入轨迹采集和循迹控制思想,使控制模型能够提前开展验证,并且能够实现在跟踪不同场景的轨迹时验证多场景下的跟踪效果。
50、本技术第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的基于快速原型的实车测试方法。
51、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的基于快速原型的实车测试方法。
52、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!