一种考虑船舶运动学和CORLEGs的自适应智能船舶路径规划方法
本发明涉及船舶交通安全,具体而言,尤其涉及一种考虑船舶运动学和corlegs的自适应智能船舶路径规划方法。
背景技术:
1、近年来,随着人工智能技术的发展,交通运输系统正朝着数字化、智能化的方向发展。无人船自主避碰是无人船舶自主航行的一项关键技术,无人船自主航行包括全局路径规划和局部动态避碰。全局路径规划是无人船根据已知海域的信息,通过路径规划算法,规避海岸线和海域中的静态障碍物,规划出一条由起点到终点的路径。局部动态避碰是在满足全局规划路径的前提下,无人船根据自动识别系统(automatic identificationsystem,ais)定位系统和雷达、声呐等传感器,对附近海域内的动态障碍物或者未知的静态障碍物的位置进行探测,通过局部运动规划算法进行自主避碰,完成避碰后同全局航路对接。其中全局路径规划算法有基于图搜索的djikstra、a-star算法等;局部路径规划算法有动态窗口法和人工势场法等。
2、单一的路径规划方法无法解决智能船舶的自主航行问题,现有方法在研究全局路径规划时忽略了船舶运动模型与动力学性能对避让行为的影响,同时存在转向过多,路径不够平滑等问题;现有方法在研究局部路径规划主要聚焦于两船的或多船间的避让,较少考虑全局的航路规划以及航路恢复;此外,部分方法虽然融合了全局与局部路径规划算法,实现了动、静态障碍物的安全避让,但较少地考虑了colregs和船舶运动学模型约束对避让行为来的影响。
3、目前路径规划算法研究与航海实践的适配性较低,领域内暂缺少考虑实现符合colregs的操纵的“全局+局部”路径规划算法。
技术实现思路
1、根据上述提出现有智能船舶缺少考虑colregs的“全局+局部”路径规划方法的技术问题,本发明提供一种一种考虑船舶运动学和corlegs的自适应智能船舶路径规划方法。在进行全局航线路径规划的同时,考虑船舶动力学性能与符合colregs的避碰动作,辅助智能船舶在多种会遇场景下进行安全、合理的“全局+局部”路径规划。
2、本发明采用的技术手段如下:
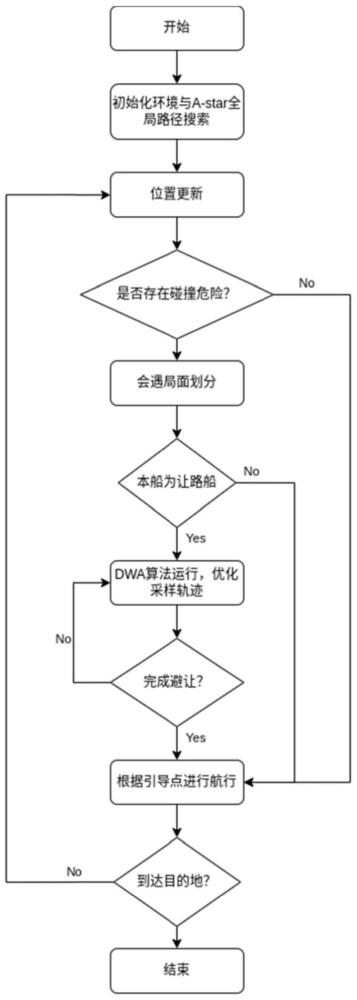
3、一种考虑船舶运动学和corlegs的自适应智能船舶路径规划方法,包括以下步骤:
4、s1、从船载设备获取电子海图信息和本船的航行状态数据,构建栅格地图与障碍物信息,其中,本船的航行状态数据包括船舶位置、船舶起点与目标点、静态障碍物位置和数量;
5、s2、依据获取的本船的航行状态数据,采用a-star算法对栅格地图进行全局路径搜索,从而获取规划路径上的航路关键点;
6、s3、采用动态窗口算法将所述航路关键点作为引导点进行航行;
7、s4、判断碰撞风险,存在碰撞风险时进行会遇局面的划分,所述会遇局面包括対遇场景、左舷交叉场景、右舷交叉场景以及追越场景;
8、s5、采用dwa算法依据《国际海上避碰规则》优化采样轨迹;
9、s6、根据优化后的采样轨迹完成局部避碰,以引导点作为局部终点,进行航路恢复;
10、s7、智能船舶抵达终点后,算法结束,否则,循环s3-s6,直至船舶抵达终点。
11、进一步地,所述s2步骤实现过程如下:
12、依据获取的电子海图信息构建栅格地图,根据以下公式进行基于a-star的路径搜所:
13、f(n)=g(n)+h(n)
14、其中,f(n)为从起点移动到目标方格的代价总和,n为目标方格的编号,g(n)为从起点移动到指定方格的移动代价,h(n)从指定方格移动到终点的估算代价。
15、进一步地,所述s3步骤实现过程如下:
16、dwa在线速度与角速度可行集合中进行采样,交叉组合后得出速度采样空间,依次通过船舶运动学模型计算得出多组轨迹空间,评价完成后,返回最优轨迹与控制量u=[v(m/s),w(rad/s)];
17、所述船舶运动模型如下:
18、
19、
20、其中,x(t0),y(t0)分别为0时刻本船的横纵坐标,x(tn),y(tn)分别为n时刻本船的横纵坐标,θ(t)为t时刻船舶的旋转角。
21、进一步地,所述船舶动力学模型由以下速度空间决定:
22、s31、船舶采样速度区间小于船舶最大速度,大于最小速度,即:
23、vm={v∈[vmin,vmax],ω∈[ωmin,ωmax]
24、vmin,vmax为船舶可达的最大和最小速度,ωmin,ωmax为船舶可达的最大和最小角速度;
25、s32、船舶速度,角速度由船舶自身运动性能决定,为限制船舶在搜索空间内短时间可达的速度和角速度,应满足以下约束:
26、
27、其中,(v,ω)为船舶线速度和角速度采样空间,va,ωa分别为船舶在上一时刻的线速度与角速度,分别为船舶在当前时刻线速度变化率与角速度变化率,t为采样时间;
28、s33、为保证船舶安全,船舶可选速度空间应满足最大制动距离内减为零,设置dist(v,ω)为最大制动距离,则最大允许速度集为:
29、
30、其中,(v,ω)为船舶线速度和角速度采样空间,dist(v,ω)为最大制动距离,dwa依据时间步长δt、分别为线速度采样步长和角速度采样步长。
31、s34、船舶速度采样空间即为:
32、v=va∪vd∪vm。
33、进一步地,所述s4步骤实现过程如下:
34、s41、当本船与目标船的航向角度差满足时,处于対遇场景,本船应向右转向,从目标船的左舷通过;
35、s42、满足则构成左舷交叉场景,此时本船为直航船,目标船为让路船;
36、s43、当航向角度差满足时,构成右舷交叉场景,本船为让路船,应当采取右侧转向,从目标船的左舷通过的动作;
37、s44、当满足时,船舶处于追越场景,应向左转向,从目标船的左舷通过。
38、进一步地,所述s5步骤实现过程如下:
39、考虑《colregs》避碰动作的船舶速度采样空间简化为:
40、
41、其中,(v,ω)为船舶线速度和角速度采样空间,δθ为船舶的转向角,为本船与目标船的航向角度差;
42、本船为让路船时,考虑corlegs后的船舶速度采样空间即为:
43、v=va∪vd∪vm∪vs
44、本船为直航船时,不应采取转向动作。
45、进一步地,所述s6步骤实现过程如下:
46、s61、确定速度采样空间之后,通过船舶运动模型向前模拟短时间内的船舶轨迹,并对采样空间内的所有候选轨迹进行正则化评价,从而获取船舶轨迹的航向得分、距离得分和速度得分;
47、s62、评价后选取最优轨迹,评价函数为:
48、g(v,ω)=σ(α*heading(v,ω)+β*dist(v,ω)+γ*velocity(v,ω))
49、其中,heading(v,ω)、dist(v,ω)、velocity(v,ω)分别表示航向得分、距离得分和速度得分,分别为航向、距离、速度得分的权重因子,σ为归一化系数。
50、较现有发明相比,本发明具有以下优点:
51、1、本发明设计了一种考虑船舶运动学和corlegs的自适应智能船舶路径规划方法,针对传统a-star算法拐点冗余与dwa算法的“短视”问题进行了融合改进,能够辅助智能船舶在多种场景下进行安全、合理的“全局+局部”路径规划。
52、2、本发明对dwa算法的采样轨迹进行了优化,提升了算法的运行效率,减少了智能船舶在实际海域航行时规划避碰动作所需的时间。
53、3、本发明结合航海实践与船舶运动学模型,实现了考虑colregs的智能避碰动作,解决了领域内暂缺少考虑实现符合colregs的操纵的“全局+局部”路径规划算法的问题。
- 还没有人留言评论。精彩留言会获得点赞!