一种无人机自主返航方法、装置及无人机与流程
本发明设计无人机控制,尤其涉及一种无人机自主返航方法、装置及无人机。
背景技术:
1、随着无人机的广泛使用,无人机自主返航成为了无人机的关键功能。而无人机自主返航一般需要通过gps信号来定位无人机的位置。如果在飞行过程中gps信号不稳定,或者被人为屏蔽,那么自主返航就可能会出现偏差,无人机可能会误判自己的位置,导致返航时撞上障碍物,甚至坠毁。因此,在存在gps信号不稳定或者被屏蔽的情况下,大多数无人机厂家都建议手动控制无人机返航。
2、现有技术中,一般采用如下方案进行自主返航:无人机垂直上升到预先设定的高度;然后再沿一条水平直线前进到返航点的正上方;最后垂直下降到返航点的地面。在上述方案中,无人机的垂直下降速度较慢,而且在这一过程中所需要耗费的时间和电量较多,但由于无人机的续航时间一般较短,因此大大增加了无人机在自主返航过程中出现电量过低导致无人机从空中坠落的风险。但是在现有技术中无人机的自主返航仍然需要依赖gps信号或者控制信号来进行自主返航,当处在gps信号比较弱的地区或丢失控制信号后,导致自主返航功能丢失,很难找回无人机。
技术实现思路
1、为了克服上述技术缺陷,本发明的目的在于提供一种无人机自主返航方法、装置及无人机,用于解决现有无人机返航过程操作繁琐,且信号干扰造成的丢失风险较高的问题。
2、本发明公开了一种无人机自主返航方法,包括:
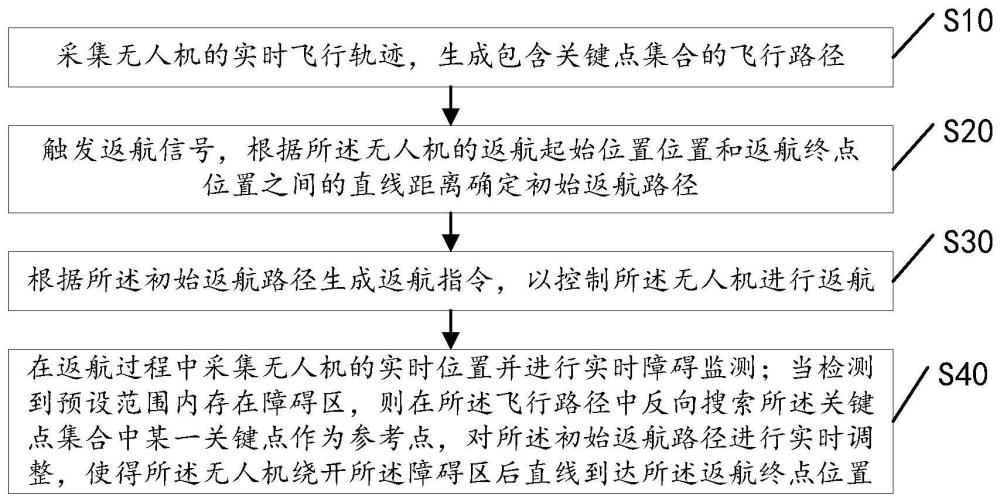
3、采集无人机的实时飞行轨迹,生成包含关键点集合的飞行路径;
4、触发返航信号,根据所述无人机返航起始位置和返航终点位置之间的直线距离确定直线达到的初始返航路径;
5、根据所述初始返航路径生成返航指令,以控制所述无人机进行返航;
6、在返航过程中采集所述无人机的实时位置并进行实时障碍监测;
7、当检测到预设范围内存在障碍区,则在所述飞行路径中反向搜索所述关键点集合重点的某一关键点作为参考点,对所述初始返航路径进行实时调整,使得无人机绕开所述障碍区后直线到达所述返航终点位置。
8、优选地,采集无人机的实时飞行轨迹,生成包含关键点集合的飞行路径,包括:
9、设立起始位置为一关键点;
10、实时监测所述无人机的飞行轨迹,当所述无人机的飞行轨迹相对前一关键点的飞行轨迹变化超出预设范围,则在所述无人机当前位置至前一关键点的飞行区间内确定一轨迹变化最大点作为关键点,生成包含所述关键点集合的飞行路径。
11、优选地,当检测到预设范围内存在障碍区,则在所述飞行路径中反向搜索所述关键点集合中的某一关键点作为参考点,对所述初始返航路径进行实时调整,使得所述无人机绕开所述障碍区后直线到达所述返航终点位置,包括:
12、在所述飞行路径中反向搜索距离无人机的实时位置最近可直线到达的关键点作为所述参考点;
13、根据所述参考点生成由所述无人机的实时位置直线至所述参考点后,再由所述参考点直线到达所述返航终点位置的调整路径,使得无人机绕开障碍区后直线到达所述返航终点位置。
14、优选地,包括:
15、当反向搜索距离所述无人机的实时位置最近可直线到达的关键点失败,则确定朝向所述返航终点位置的方向上距离所述无人机的实时位置最近的关键点作为参考点;
16、确定所述参考点和所述无人机的实时位置间的中垂线;
17、识别位于所述中垂线上的障碍区,以确定所述中垂线上绕开所述障碍区且距离所述无人机的实时位置最近的位置,获得中间位置;
18、生成由所述无人机的实时位置直线至所述中间位置,再由所述中间位置直线至所述返航终点位置的调整路径,使得无人机绕开障碍区后直线到达所述返航终点位置。
19、优选地,所述采集无人机的实时飞行轨迹,包括:
20、采用惯性测量单元实时采集飞行数据;
21、根据所述飞行数据进行位置映射,以采集无人机的实时飞行轨迹。
22、优选地,所述无人机自主返航至所述返航终点位置后,初始化无人机的飞行路径。
23、本发明还公开一种无人机自主返航装置,包括:
24、传感器模块,包括障碍监测的传感器和获取无人机实时飞行轨迹的惯性测量单元;
25、轨迹记录模块,用于生成包含关键点集合的飞行路径;
26、返航规划模块,用于根据返航起始位置和返航终点位置确定初始返航路径;以及对所述初始返航路径进行调整,使得所述无人机绕开障碍区后直线到达所述返航终点位置。
27、控制模块,用于触发返航信号,根据所述初始返航路径或调整后的初始返航路径生成返航指令,以控制无人机进行返航;
28、在返航过程中采集所述无人机的实时位置并通过传感器模块进行实时障碍监测;当所述传感器检测到预设范围内存在障碍区,则返航规划模块在所述飞行路径中反向搜索在关键点集合中的某一关键点作为参考点,对所述初始返航路径进行调整,使得无人机绕开障碍区后直线到达所述返航终点位置。
29、优选地,所述返航规划模块执行:
30、在所述飞行路径中反向搜索距离所述无人机的实时位置最近可直线到达的关键点作为所述参考点;
31、根据所述参考点生成由所述无人机的实时位置直线至所述参考点后,再由所述参考点直线到达所述返航终点位置的调整路径,使得无人机绕开障碍区后直线到达所述返航终点位置。
32、优选地,所述返航规划模块执行:
33、当反向搜索距离所述无人机的实时位置最近可直线到达的关键点失败,则确定朝向所述返航终点位置的方向上距离所述无人机的实时位置最近的关键点作为参考点;
34、确定所述参考点和所述无人机的实时位置间的中垂线;
35、识别位于所述中垂线上的障碍区,以确定所述中垂线上绕开所述障碍区且距离所述无人机的实时位置最近的位置,获得中间位置;
36、生成由所述无人机的实时位置直线至所述中间位置,再由所述中间位置直线至所述返航终点位置的调整路径,使得无人机绕开障碍区后直线到达所述返航终点位置。
37、本发明还提供一种无人机,应用任一项所述的无人机自主返航装置。
38、采用了上述技术方案后,与现有技术相比,具有以下有益效果:
39、本实施方式提供的自主返航方法,触发返航信号后,根据无人机返航起始位置和返航终点位置确定直线达到的初始返航路径,在返航过程中进行实时障碍监测,当存在障碍区,搜索飞行路径中某一关键点作为参考点,具体的,搜索可直达的关键点或采用中垂线法确定中间位置,使得无人机绕开障碍区后直线到达所述返航终点位置,不依赖gps信号进行返航路径规划,可以适用于gps信号弱或者无信号时自动返航,解决现有无人机返航过程操作繁琐,且信号干扰造成的丢失风险较高的问题。
技术特征:
1.一种无人机自主返航方法,其特征在于,包括:
2.根据权利要求1所述的无人机自主返航方法,其特征在于,采集无人机的实时飞行轨迹,生成包含关键点集合的飞行路径,包括:
3.根据权利要求1所述的无人机自主返航方法,其特征在于,所述当检测到预设范围内存在障碍区,则在所述飞行路径中反向搜索所述关键点集合中的某一关键点作为参考点,对所述初始返航路径进行实时调整,使得所述无人机绕开所述障碍区后直线到达所述返航终点位置,包括:
4.根据权利要求3所述的无人机自主返航方法,其特征在于:
5.根据权利要求1所述的无人机自主返航方法,其特征在于,所述采集无人机的实时飞行轨迹,包括:
6.根据权利要求1所述的无人机自主返航方法,其特征在于:
7.一种无人机自主返航装置,其特征在于,包括:
8.根据权利要求7所述的无人机自主返航装置,其特征在于,所述返航规划模块执行:在所述飞行路径中反向搜索距离所述无人机的实时位置最近可直线到达的关键点作为所述参考点;
9.根据权利要求7所述的无人机自主返航装置,其特征在于,所述返航规划模块执行:当反向搜索距离所述无人机的实时位置最近可直线到达的关键点失败,则确定朝向所述返航终点位置的方向上距离所述无人机的实时位置最近的关键点作为参考点;
10.一种无人机,其特征在于:应用上述权利要求7-9中任一项所述的无人机自主返航装置。
技术总结
本发明提供了一种无人机自主返航方法、装置及无人机,涉及无人机控制技术领域,包括:采集无人机的实时飞行轨迹,生成包含关键点集合的飞行路径;触发返航信号,根据无人机当前位置和返航终点位置之间的直线距离确定初始返航路径;根据所述初始返航路径生成返航指令,以控制无人机进行返航;在返航过程中采集无人机的实时位置并进行实时障碍监测;当检测到预设范围内存在障碍区,则在所述飞行路径中反向搜索所述关键点集合中的某一关键点作为参考点,对所述初始返航路径进行调整,使得无人机绕开所述障碍区后直线到达所述返航终点位置,解决现有无人机返航过程操作繁琐,且信号干扰造成的丢失风险较高的问题。
技术研发人员:李才博,马涵,耿昌彪,陈颖安
受保护的技术使用者:昭通亮风台信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!