一种轮式双足机器人的运动控制方法及系统
本发明涉及轮式双足机器人,尤其涉及一种轮式双足机器人的运动控制方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、随着科学技术的不断发展,移动机器人逐渐融入到日常生活工作中,这也导致人们对机器人的场景适应能力和工作效率提出了更高的需求。结合了轮式机器人能效高的优势和腿足式机器人地形适应能力强的特点,在许多应用场景中,轮-腿机器人成为更好的选择。但是,四轮腿或六轮腿的机器人在转向时存在转弯半径大或转弯速度慢的问题,这限制了它们的运动灵活性。拥有快速移动和零半径转弯能力的轮式双足机器人能够很好的解决这种痛点。
3、现有的技术中,通常对轮式双足机器人的车轮运动和腿部运动分开控制,即车轮控制器实现机器人平衡而腿部控制器实现地形适应,这种方式忽略了轮-腿之间的耦合作用,不利于机器人的稳定控制。同时,轮式双足机器人具有高速转向的运动潜力,然而转向速度越快发生侧翻的风险越大。
技术实现思路
1、为了解决上述问题,本发明提出了一种轮式双足机器人的运动控制方法及系统,建立轮-腿动力学模型,采用双腿配合主动使躯干产生横滚角的方式,通过重力的分量来抵消离心力,以增强机器人在高速转向时的鲁棒性,防止发生侧翻。
2、在一些实施方式中,采用如下技术方案:
3、一种轮式双足机器人的运动控制方法,包括:
4、基于躯干动力学模型构建模型预测控制器,基于轮-腿动力学模型构建全身控制器;
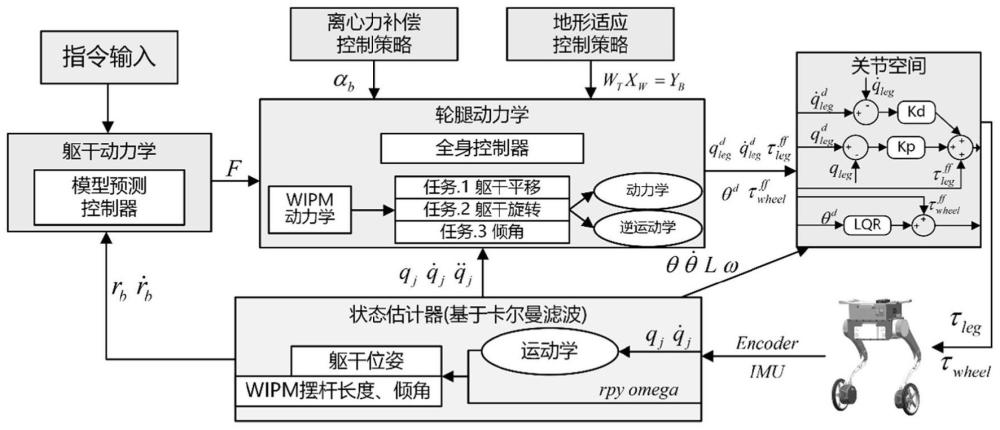
5、模型预测控制器基于输入的运动控制指令输出需要向躯干施加的广义力旋量f;
6、基于wipm动力学求解机器人的躯干质心与车轮中心点在x轴方向的距离δx;
7、基于离心力补偿策略计算躯干横滚角,基于地形适应策略计算躯干坐标系下的车轮位置;
8、基于得到的距离δx、躯干横滚角和车轮位置,经过逆运动学求解得到期望的腿部关节角度、腿部关节速度和摆杆俯仰角,作为状态输入;
9、全身控制器基于模型预测控制器求解得到的广义力旋量f和逆运动学求解得到的状态输入,融合动力学前馈和关节反馈,最终得到控制机器人运动的腿部关节力矩和轮关节力矩。
10、在另一些实施方式中,采用如下技术方案:
11、一种轮式双足机器人的运动控制系统,包括:
12、控制器构建模块,用于基于躯干动力学模型构建模型预测控制器,基于轮-腿动力学模型构建全身控制器;
13、模型预测控制模块,用于通过模型预测控制器基于输入的运动控制指令输出需要向躯干施加的广义力旋量f;基于wipm动力学求解机器人的躯干质心与车轮中心点在x轴方向的距离δx;基于离心力补偿策略计算躯干横滚角,基于地形适应策略计算躯干坐标系下的车轮位置;
14、状态计算模块,用于基于得到的距离δx、躯干横滚角和车轮位置,经过逆运动学求解得到期望的腿部关节角度、腿部关节速度和摆杆俯仰角,作为状态输入;
15、机器人控制模块,用于通过全身控制器基于模型预测控制器求解得到的广义力旋量f和逆运动学求解得到的状态输入,融合动力学前馈和关节反馈,最终得到控制机器人运动的腿部关节力矩和轮关节力矩。
16、在另一些实施方式中,采用如下技术方案:
17、一种终端设备,其包括处理器和存储器,处理器用于实现指令;存储器用于存储多条指令,所述指令适于由处理器加载并执行上述的轮式双足机器人的运动控制方法。
18、在另一些实施方式中,采用如下技术方案:
19、一种计算机可读存储介质,其中存储有多条指令,所述指令适于由终端设备的处理器加载并执行上述的轮式双足机器人的运动控制方法。
20、与现有技术相比,本发明的有益效果是:
21、(1)不同于对车轮与双足身体的解耦,本发明更强调轮-腿运动时的一致性,建立轮-腿动力学模型,揭示从车轮向髋关节的力传递关系。同时,开发了一种离心力补偿的控制策略,采用双腿配合主动使躯干产生横滚角的方式,通过重力的分量来抵消离心力,以增强机器人在高速转向时的鲁棒性,防止发生侧翻。
22、(2)本发明设计了一种基于模型预测控制的分层控制框架,融合离心力补偿控制策略和地形适应控制策略以增强机器人的高速转向鲁棒性和地形适应能力。在该控制框架下,轮式双足机器人能够表现出更好的动态运动能力。
23、本发明的其他特征和附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本方面的实践了解到。
技术特征:
1.一种轮式双足机器人的运动控制方法,其特征在于,包括:
2.如权利要求1所述的一种轮式双足机器人的运动控制方法,其特征在于,基于躯干动力学模型构建模型预测控制器,具体为:
3.如权利要求1所述的一种轮式双足机器人的运动控制方法,其特征在于,所述轮-腿动力学模型,具体为:
4.如权利要求1所述的一种轮式双足机器人的运动控制方法,其特征在于,基于wipm动力学求解机器人的躯干质心与车轮中心点在x轴方向的距离δx,具体为:
5.如权利要求1所述的一种轮式双足机器人的运动控制方法,其特征在于,
6.如权利要求1所述的一种轮式双足机器人的运动控制方法,其特征在于,基于地形适应策略计算躯干坐标系下的车轮位置,具体为:
7.如权利要求1所述的一种轮式双足机器人的运动控制方法,其特征在于,全身控制器基于得到的广义力旋量、距离δs、躯干横滚角和车轮位置,求解得到腿关节加速度、腿部关节前馈力矩、轮关节前馈力矩和摆杆俯仰角,具体为:
8.一种轮式双足机器人的运动控制系统,其特征在于,包括:
9.一种终端设备,其包括处理器和存储器,处理器用于实现指令;存储器用于存储多条指令,其特征在于,所述指令适于由处理器加载并执行权利要求1-7任一项所述的轮式双足机器人的运动控制方法。
10.一种计算机可读存储介质,其中存储有多条指令,其特征在于,所述指令适于由终端设备的处理器加载并执行权利要求1-7任一项所述的轮式双足机器人的运动控制方法。
技术总结
本发明公开了一种轮式双足机器人的运动控制方法及系统,包括:模型预测控制器基于输入的运动控制指令输出需要向躯干施加的广义力旋量F;求解机器人的躯干质心与车轮中心点在x轴方向的距离Δx;基于离心力补偿策略计算躯干横滚角,基于地形适应策略计算躯干坐标系下的车轮位置;经过逆运动学求解得到期望的腿部关节角度、腿部关节速度和摆杆俯仰角,作为状态输入;全身控制器基于模型预测控制器求解得到的广义力旋量F和逆运动学求解得到的状态输入,融合动力学前馈和关节反馈,最终得到控制机器人运动的腿部关节力矩和轮关节力矩。本发明增强机器人在高速转向时的鲁棒性,防止发生侧翻。
技术研发人员:荣学文,王宇,陈腾,张国腾,辛亚先
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!